相机测距技术原理
相机测距技术主要为:单目相机测距,双目相机测距,结构光测距,TOF测距。
目录
单目相机测距:
双目相机测距:
结构光测距:
普通的结构光:
Light Coding(激光散斑光源):
TOF(飞行时间测距法):
单目相机测距:
单目相机测距原理可以看做是小孔成像
图中f是摄像头的焦距,c是镜头光心。物体发出的光经过相机的光心,然后成像于图像传感器或者也可以说是像平面上,如果设物体所在平面与相机平面的距离为d,物体实际高度为H,在传感器上的高度为h,H一定要是已知的,我们才能求得距离d。
由相似三角形得到他们的关系:![]() 。
。
实现的时候要先得知物体的尺寸(可以通过目标识别进行估算)以及摄像头的焦距。适用于测量已知规则物体的距离。
优点:(1)成本低;(2)对计算资源要求低;(3)结构简单。
缺点:(1)需要不断更新和维护一个庞大的样本数据库,从而保证系统达到较高的识别率;(2)适用范围小,无法对非标准障碍物进行判断;(3)由于距离并非真正意义上的测量,准确度较低;(4)测距近。
双目相机测距:
通过对两幅图像视差的计算,直接对前方景物(图像所拍摄到的范围)进行距离测量,而无需判断前方出现的是什么类型的障碍物。所以对于任何类型的障碍物,都能根据距离信息的变化,进行必要的预警或制动。双目摄像头的原理与人眼相似。人眼能够感知物体的远近,是由于两只眼睛对同一个物体呈现的图像存在差异,也称“视差”。物体距离越远,视差越小;反之,视差越大。视差的大小对应着物体与眼睛之间距离的远近,这也是3D电影能够使人有立体层次感知的原因。
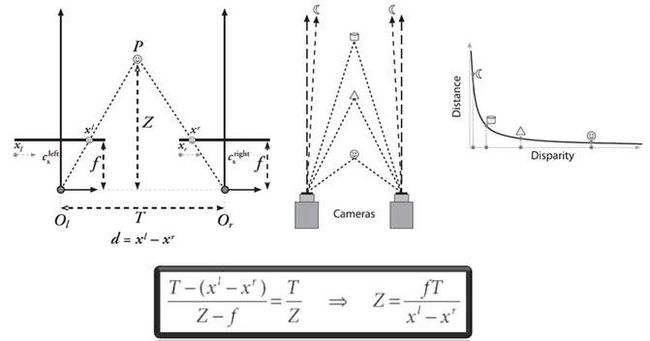
图中点P为空间中待测点,![]() 、
、![]() 分别是代表两摄像头的光点,
分别是代表两摄像头的光点,![]() 、
、![]() 代表点P在两摄像头成像上两个像素点x轴方向位置,T为两摄像头之间的距离,f是摄像头的焦距,Z为点P到两摄像头的垂直距离。
代表点P在两摄像头成像上两个像素点x轴方向位置,T为两摄像头之间的距离,f是摄像头的焦距,Z为点P到两摄像头的垂直距离。
计算时![]() 、
、![]() 是以x轴方向上以左端为原点到
是以x轴方向上以左端为原点到![]() 、
、![]() 的距离,公式中
的距离,公式中![]() 得到,
得到,![]() 和
和![]() 两点之间距离。
两点之间距离。
具体的实现步骤:相机标定(获取相机的内参,外参以及畸变参数,确定三维坐标系和相机图像坐标系的映射关系)——双目校正(将相机标定得到的参数进行消除畸变,然后把两幅图像严格地行对应,使得两幅图像的对极线恰好在同一水平线上,这样一幅图像上任意一点与其在另一幅图像上的对应点就必然具有相同的行号)——双目匹配(把同一场景在左右视图上对应的像点匹配起来,获取视差图)——计算深度信息。
优点:(1)成本适中,精度较高;(2)测量不受障碍物影响;(3)结构简单。
缺点:(1)依赖物体本身的特征点,对表面颜色和纹理特征不明显的物体效果较差;(2)计算量非常大,对计算单元的性能要求非常高;(3)对采光敏感,精度受匹配的精度和正确性影响;(4)测距较近。
结构光测距:
普通的结构光:
通过投影一个预先设计好的图案作为参考图像(编码光源),将结构光投射至物体表面,再使用摄像机接收该物体表面反射的结构光图案,这样,同样获得了两幅图像,一幅是预先设计的参考图像,另外一幅是相机获取的物体表面反射的结构光图案,由于接收图案必会因物体的立体型状而发生变形,故可以通过该图案在摄像机上的位置和形变程度来计算物体表面的空间信息。普通的结构光方法仍然是部分采用了三角测距原理的深度计算。
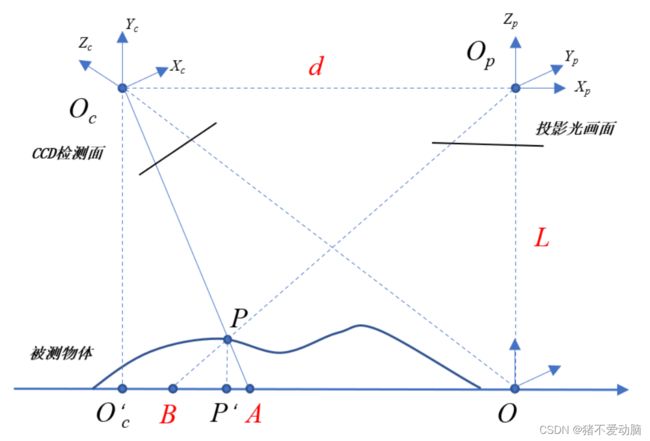 图中
图中 是被测物体表面一点,
是被测物体表面一点,![]() 是摄像机镜头光心,
是摄像机镜头光心,![]() 是投影仪镜头光心,
是投影仪镜头光心, 是基线(投影仪镜头光心到摄像机光心之间的距离),
是基线(投影仪镜头光心到摄像机光心之间的距离), 是为摄像机光心到参考平面的距离。
是为摄像机光心到参考平面的距离。
由相似三角形可得:![]() ,由于Y轴平行于光栅方向,所以在参考平面上,相位沿着X轴方向不断变化,则在参考平面上一点(x,y),设其相位为θ,λ为光栅节距,则有:
,由于Y轴平行于光栅方向,所以在参考平面上,相位沿着X轴方向不断变化,则在参考平面上一点(x,y),设其相位为θ,λ为光栅节距,则有:![]() ,所以
,所以![]() ,最后解得
,最后解得![]() 。其中
。其中![]() 为所求物点高度,L、d、λ为系统标定或结构光光栅编码时可确定的参数。所以只需要通过结构光解码求得物点P处相位相对于参考平面相位变化值Δθ即可完成三维信息测量,而基线d越大测量效果越好。
为所求物点高度,L、d、λ为系统标定或结构光光栅编码时可确定的参数。所以只需要通过结构光解码求得物点P处相位相对于参考平面相位变化值Δθ即可完成三维信息测量,而基线d越大测量效果越好。
优点:(1)技术成熟,可实现量产;(2)结构光光源主动提供了特征点或者直接的码字,不需要根据场景的变化而有变化,降低了匹配的难度;(3)近距离测量精确度高。
缺点:(2)在室外容易被强自然光淹没,室外效果不佳;(2)受物体上投射到的图像或光点大小影响,随距离增大测量精确度降低;(3)容易受光滑平面的反光影响。
Light Coding(激光散斑光源):
激光散斑是由无规散射体被相干光照射产生的。这些散斑具有高度的随机性,而且会随着距离的不同而变换图案。也就是说空间中任意两处的散斑图案都是不同的。只要在空间中打上这样的光,整个空间都被做了标记,把一个物体放进这个空间,只要看看物体上面的散斑图案,就可以知道这个物体在什么位置了。当然在这之前要把整个空间的散斑图案都记录下来,所以要先做一次光源标定。光源标定技术在整个空间中每隔一段距离选取一个参考平面,把参考平面上的散斑图案保存下来。


常用的数字统计散斑的方法,是将一定数目的随机分布的高斯光斑进行叠加,假设图像的背景光强均匀,s表示散斑的数目,a表示散斑的尺寸大小,![]() 表示图像背景光强(通常为1),(
表示图像背景光强(通常为1),( ,
, )表示第k个散斑颗粒的中心位置。
)表示第k个散斑颗粒的中心位置。
则图像灰度函数可表示为:
优点:相比一般结构光(1)近距离范围内精度更高;(2)不是通过空间几何关系求解的,它的测量精度只和标定时取的参考面的密度有关,不用提高精度而将基线拉宽。
缺点:同一般结构光的缺点一样
TOF(飞行时间测距法):
发射模块和接收模块是TOF相机的核心部分,其工作原理是通过红外发射器发射给目标连续发射调制过的光脉冲,遇到物体反射后,用接收器接收反射回来的光脉冲,通过探测光脉冲的飞行(往返)时间来得到目标物距离。这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF相机则是同时得到整幅图像的深度信息。

优点:(1)计算量小;(2)不受物体表面灰度和特征影响;(3)计算精度不随距离改变而变化,稳定在cm级。
缺点:(1)成本偏高;(2)在高分辨率或是高帧率的情况下近距离物体会失真,所以只能适用于较近距离测量;(3)有物体遮挡的墙面弯曲,由于多路径信号返回导致地板失真。