transformer序列预测示例
本文参考:
【python量化】将Transformer模型用于股票价格预测_蚂蚁爱Python的博客-CSDN博客_transformer 股票
一、Transformer初步架构图

二、transformer各组件信息
1、positional_encoder
X -> [positional_encoding(embedding + position)] -> X‘
2、multi_head_attention_forward
输入:
Query:(L, N, E)
Key:(S, N, E)
Value:(S, N, E)
输出:
Attn_output:(L,N,E)
Attn_output_weights:(N,L,S)
3、MultiheadAttention
输入:
Embed_dim
Num_heads
Multihead_attn = MultiheadAttention(embed_dim, num_heads)
Attn_output, attn_output_weights = multihead_attn(query, key, value)
4、TransformerEncoderLayer
输入:
d_model,
n_head
5、TransformerEncoder
输入:
Encoder_layer
Num_layers
Encoder_layer = TransformerEncoderLayer(d_model=512, nhead=8)
Transformer_encoder = TransformerEncoder(encoder_layer, num_layers=6)
6、TransformerDecoderLayer
输入:
d_model
n_head
7、TransformerDecoder
输入:
Decoder_layer
Num_layers
Decoder_layer = TransformerDecoder(d_model=512, nhead=8)
Transformer_decoder = TransformerDecoder(decoder_layer, num_layers=6)
8、transformer
输入:
Nhead
Num_encoder_layers
Transformer_model = Transformer(nhead=16, num_encoder_layers=12)
Src = torch.rand((10, 32, 512))
Tgt = torch.rand((20, 32, 512))
Out = transformer_model(src, tgt)
三、transformer进行序列预测示例
1、csv输入序列的shape为(126, 1)
2、切分训练集(88, )和测试集(38, )
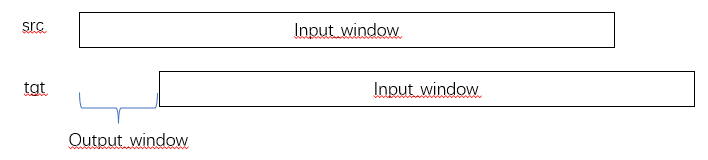
3、滑动窗口input_window得到(序列值, 标签值)
得到的训练序列为(67, 2, 20)
67:窗口滑动次数;
2:序列+标签=2个
20:输入窗口长度
得到测试序列(17, 2, 20)
17:窗口滑动次数
2:序列+标签=2个
20:输入窗口长度
4、将input和target转成模型需要的格式(S=20,N=2, E=1)



5、模型训练至掩码生成(20, 20)
6、Pos_encoder
Src(20, 2, 1) + positional_encoder(20, 1, 250) => (20, 2, 250)
广播机制完成
7、transformer_encoder:(20, 2, 250)-> (20, 2, 250)
8、decoder:(20, 2, 250) -> (20, 2, 1) 通过Linear完成
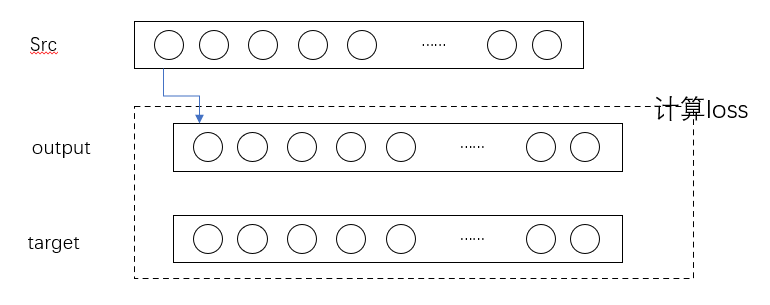
9、loss值计算
因为有mask存在,所以每次预测下个值时的后续值是未知的。计算loss的过程如下:
四、完整代码(针对原文中错误修改过的)
import torch
import torch.nn as nn
import numpy as np
import time
import math
import matplotlib.pyplot as plt
from sklearn.preprocessing import MinMaxScaler
import pandas as pd
torch.manual_seed(0)
np.random.seed(0)
input_window = 20
output_window = 1
batch_size = 2
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(device)
class PositionalEncoding(nn.Module):
def __init__(self, d_model, max_len=5000):
super(PositionalEncoding, self).__init__()
pe = torch.zeros(max_len, d_model)
position = torch.arange(0, max_len, dtype=torch.float).unsqueeze(1)
div_term = torch.exp(torch.arange(0, d_model, 2).float() * (-math.log(10000.0) / d_model))
pe[:, 0::2] = torch.sin(position * div_term)
pe[:, 1::2] = torch.cos(position * div_term)
pe = pe.unsqueeze(0).transpose(0, 1)
self.register_buffer('pe', pe)
def forward(self, x):
return x + self.pe[:x.size(0), :]
class TransAm(nn.Module):
def __init__(self, feature_size=250, num_layers=1, dropout=0.1):
super(TransAm, self).__init__()
self.model_type = 'Transformer'
self.src_mask = None
self.pos_encoder = PositionalEncoding(feature_size)
self.encoder_layer = nn.TransformerEncoderLayer(d_model=feature_size, nhead=10, dropout=dropout)
self.transformer_encoder = nn.TransformerEncoder(self.encoder_layer, num_layers=num_layers)
self.decoder = nn.Linear(feature_size, 1)
self.init_weights()
def init_weights(self):
initrange = 0.1
self.decoder.bias.data.zero_()
self.decoder.weight.data.uniform_(-initrange, initrange)
def _generate_square_subsequent_mask(self, sz):
mask = (torch.triu(torch.ones(sz, sz)) == 1).transpose(0,1)
mask = mask.float().masked_fill(mask==0, float('-inf')).masked_fill(mask == 1, float(0.0))
return mask
def forward(self, src):
if self.src_mask is None or self.src_mask.shape[0] == len(src):
device = src.device
mask = self._generate_square_subsequent_mask(len(src)).to(device)
self.src_mask = mask
src = self.pos_encoder(src)
output = self.transformer_encoder(src, self.src_mask)
output = self.decoder(output)
return output
def create_inout_sequences(input_data, tw):
inout_seq = []
L = len(input_data)
for i in range(L - tw):
train_seq = input_data[i: i + tw]
train_label = input_data[i + output_window: i + tw + output_window]
inout_seq.append((train_seq, train_label))
return torch.FloatTensor(inout_seq)
def get_data():
series = pd.read_csv("D:\\temp\\0001_daily.csv", usecols=[0])
scaler = MinMaxScaler(feature_range=[-1, 1])
series = scaler.fit_transform(series.values.reshape(-1,1)).reshape(-1)
train_samples = int(0.7 * len(series))
train_data = series[:train_samples]
test_data = series[train_samples:]
train_sequence = create_inout_sequences(train_data, input_window)
train_sequence = train_sequence[:-output_window]
test_data = create_inout_sequences(test_data, input_window)
test_data = test_data[:-output_window]
return train_sequence.to(device), test_data.to(device)
def get_batch(source, i, batch_size):
seq_len = min(batch_size, len(source) - 1 - i)
data = source[i : i + seq_len]
input = torch.stack(torch.stack([item[0] for item in data]).chunk(input_window, 1))
target = torch.stack(torch.stack([item[1] for item in data]).chunk(input_window, 1))
return input, target
def train(train_data):
model.train()
total_loss = 0
for batch_index, i in enumerate(range(0, len(train_data) - 1, batch_size)):
start_time = time.time()
data, targets = get_batch(train_data, i, batch_size)
optimizer.zero_grad()
output = model(data)
loss = criterion(output, targets)
loss.backward()
torch.nn.utils.clip_grad_norm(model.parameters(), 0.7)
optimizer.step()
total_loss += loss.item()
log_interval = int(len(train_data) / batch_size / 5)
if batch_index % log_interval == 0 and batch_index > 0:
cur_loss = total_loss / log_interval
elapsed = time.time() - start_time
print('| epoch {:3d} | {:5d}/{:5d} batches | lr {:02.6f} | {:5.2f} ms | loss {:5.5f} | ppl {:8.2f}'
.format(epoch, batch_index, len(train_data) // batch_size, scheduler.get_lr()[0],
elapsed * 1000 / log_interval, cur_loss, math.exp(cur_loss)))
def evaluate(eval_model, data_source):
eval_model.eval()
total_loss = 0
eval_batch_size = 1000
with torch.no_grad():
for i in range(0, len(data_source) - 1, eval_batch_size):
data, targets = get_batch(data_source, i, eval_batch_size)
output = eval_model(data)
total_loss += len(data[0]) * criterion(output, targets).cpu().item()
return total_loss / len(data_source)
def plot_and_loss(eval_model, data_source, epoch):
eval_model.eval()
total_loss = 0.
test_result = torch.Tensor(0)
truth = torch.Tensor(0)
with torch.no_grad():
for i in range(0, len(data_source) - 1):
data, target = get_batch(data_source, i, 1)
output = eval_model(data)
total_loss += criterion(output, target).item()
test_result = torch.cat((test_result, output[-1].view(-1).cpu()), 0)
truth = torch.cat((truth, target[-1].view(-1).cpu()), 0)
plt.plot(test_result, color='red')
plt.plot(truth, color='blue')
plt.grid(True, which='both')
plt.axhline(y=0, color='k')
plt.savefig('transformer-epoch%d.png' % epoch)
plt.close()
return total_loss / i
train_data, val_data = get_data()
model = TransAm().to(device)
criterion = nn.MSELoss()
lr = 0.005
optimizer = torch.optim.AdamW(model.parameters(), lr=lr)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, 1, gamma=0.95)
epochs = 60
for epoch in range(1, epochs + 1):
epoch_start_time = time.time()
train(train_data)
if(epoch % 10 is 0):
val_loss = plot_and_loss(model, val_data, epoch)
else:
val_loss = evaluate(model, val_data)
print('-' * 89)
print('| end of epoch {:3d} | time: {:5.2f}s | valid loss {:5.5f} | valid ppl {:8.2f}'.format(epoch, (
time.time() - epoch_start_time), val_loss, math.exp(val_loss)))
print('-' * 89)
scheduler.step()
模型使用示例:
保存模型:
torch.save(model.state_dict(), 'transformer.pth.tar')
使用模型:
import os
model_path = os.path.join(os.getcwd(), 'transformer.pth.tar')
model_dict = torch.load(model_path)
model.load_state_dict(model_dict)
test_data = np.array([0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0, 0.9, 0.8, 0.7, 0.6, 0.5, 0.4, 0.3, 0.2, 0.1, 0])
test_data = torch.from_numpy(test_data).view(-1, 1, 1).to('cuda').float() # seq_len, batch_size, embedding
test_output = model(test_data)
print(test_output[-1].item())