DQN高级技巧
DQN高级技巧
DQN和TD Learning回顾
DQN
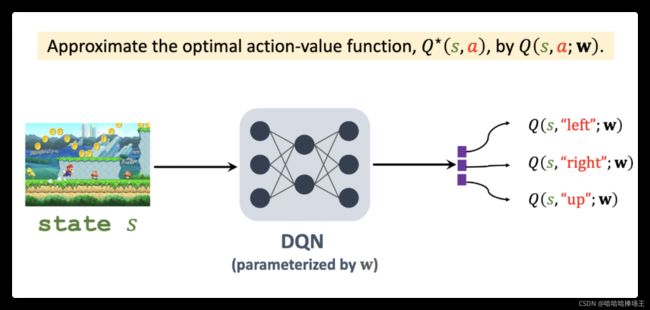
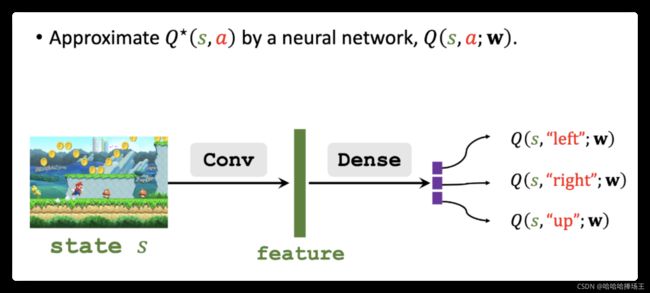
- 之前我们学过 Q ∗ ( s , a ) Q^*(s,a) Q∗(s,a)函数,它叫做动作价值函数,它依赖于当前的状态s和动作a,它基于当前状态s给所有的动作a打分,分数反映了动作a的好坏,Agent应该执行分数最高的动作,DQN的意思是使用神经网络来近似 Q ∗ Q^* Q∗函数,神经网络的参数记作:w。DQN的意思是用神经网络来近似 Q ∗ Q^* Q∗函数,训练好DQN之后,使用DQN来控制Agent。DQN的输入是状态s,将s输入DQN。如下图将超级玛丽画面放入DQN中,DQN中有卷积层和全连接层,DQN的输出是所有动作的分数,如果有三种可能的动作,DQN的输出就是三维向量。
TD算法
- 通常使用TD算法来训练DQN,下面我们来回顾一下TD算法:
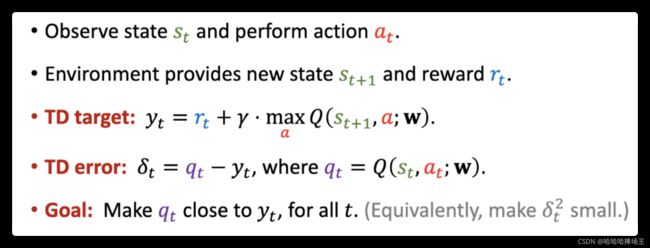
- Agent观测到当前的状态 s t s_t st,并且执行动作 a t a_t at
- 环境给出新的状态 s t + 1 s_{t+1} st+1和奖励 r t r_t rt
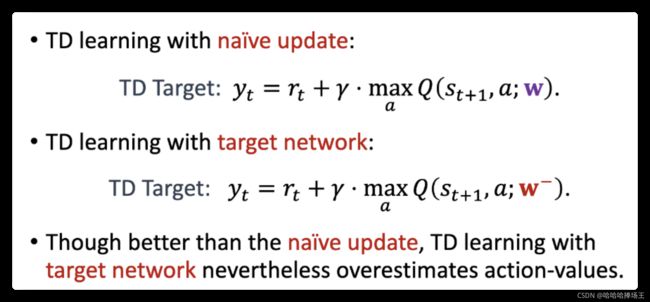
- 将TD target记作 y t = r t + γ ⋅ m a x a Q ( s + t + 1 , a ; w ) y_t=r_t + \gamma \cdot \underset{a}{max}Q(s+{t+1},a;w) yt=rt+γ⋅amaxQ(s+t+1,a;w). y t y_t yt部分基于真实的奖励 r t r_t rt,部分基于DQN在t+1时刻做出的预测
- 把DQN在t时刻做出的预测记作: q t = Q ( s t , a t ; w ) q_t=Q(s_t,a_t;w) qt=Q(st,at;w),则 q t − y t q_t-y_t qt−yt称为TD error,叫做 δ t \delta_t δt,DQN的 q t q_t qt完全是凭空猜测的,没有实际观测,而TD target y t y_t yt,部分基于自己的观测,部分基于预测,所以我们认为 y t y_t yt比 q t q_t qt更靠谱。我们希望 q t q_t qt能接近 y t y_t yt也就是TD error尽量小。
- TD算法的目标就是让我们在上面得到的 δ t \delta _t δt尽量小,所以要最小化 δ t 2 \delta _t^2 δt2,将所有 δ t 2 \delta _t^2 δt2记为L(w),w是DQN的参数,它影响 q t q_t qt从而影响 δ t \delta _t δt. 我们想要找到w使得L(w)尽量小。前面我们使用在线梯度下降来更新w
- 在时刻t,观测到 ( s t , a t , r t , s t + 1 ) (s_t,a_t,r_t,s_{t+1}) (st,at,rt,st+1)这个4元组,用它们计算出TD error,
- 将 δ 2 / 2 \delta ^2/2 δ2/2关于w求梯度,得到 g t = ∂ δ t 2 / 2 ∂ w = δ t ⋅ ∂ Q ( s t , a t ; w ) ∂ w g_t = \frac{\partial \delta _t^2/2}{\partial w}=\delta _t \cdot \frac{\partial Q(s_t,a_t;w)}{\partial w} gt=∂w∂δt2/2=δt⋅∂w∂Q(st,at;w), g t g_t gt表示梯度
- 然后使用梯度下降来更新梯度, w ← w − α ⋅ g t w\leftarrow w - \alpha \cdot g_t w←w−α⋅gt
- 上面我们得到的四元组相当于一条数据,上面我们使用它更新了w之后,将四元组给丢掉。

经验回放(Experience Replay)
Shortcoming 1:Waste of Experience
- 上面介绍的TD算法的一个缺点就是:浪费经验
- 我们将上面使用的4元组称为一个transition,经验指的是从开始到结束所有的transitions,刚刚的TD算法在使用完一个transition之后就丢弃了,这就会造成浪费,然而事实上经验是可以被重复利用的。这就是做经验回放的主要原因。

Shortcoming 2: Correlated Updates
- 刚刚的原始的TD算法还有一个缺点,就是transition之间的相关性,之前我们按照顺序来使用每一条transition来更新w,第t条transition包括 ( s t , a t , r t , s t + 1 ) (s_t,a_t,r_t,s_{t+1}) (st,at,rt,st+1),前后两条transition之间有很强的相关性,实验证明这种相关性是有害的。
Experience Replay
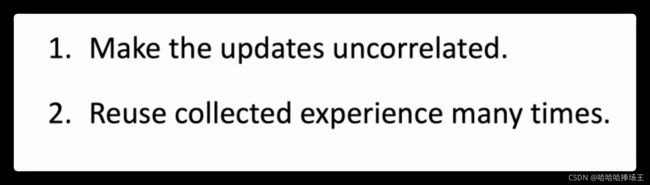
- 使用经验回放可以有效的克服刚刚提到的两个缺点,既可以重复利用经验避免浪费,也可以将transition打散,避免相关性。
- 上面我们提到一个transition包括: ( s t , a t , r t , s t + 1 ) (s_t,a_t,r_t,s_{t+1}) (st,at,rt,st+1),也是一条训练数据
- 将最新的transitions存到一个队列里,这个队列称为Replay Buffer,容量是n

-
如果Replay Buffer存满了,放入一个新的transition就删除一个条老的transition,容量n是一个超参数,有很多实验表明:n的大小对实验有影响。通常设置在10万-100万之间,取决于具体应用。
-
使用TD算法训练DQN的时候,应该这样做经验回放:
- 上面我们得到了目标函数L(w),我们希望最小化它
- 我们可以使用SGD来最小化L(w)
- 每次从Replay Buffer中随机抽取一个transition,记为: ( s i , a i , r i , s i + 1 ) (s_i,a_i,r_i,s_{i+1}) (si,ai,ri,si+1)
- 然后用这个transition来计算TD error,记为: δ i \delta _i δi
- 求导得到随机梯度。记为: g i g_i gi
- 最后做随机梯度下降,使用 g i g_i gi来更新w,这里只用了一个transtion来更新,实际使用中通常使用多个transitions算出多个随机梯度,拿梯度的平均来更新w。

- 做Experience Replay有两个好处
- 打破了transition序列的相关性
- 能重复利用过去的经验
Prioritized Experience Replay(经验回放的一种改进)
-
它与传统的经验回放的区别在于,使用非均匀抽样代替均匀抽样。
-
Basic Idea
- Buffer中有许多的transitions,但是它们的重要性各不相同,比如下面超级玛丽里面,左边的transition非常的常见有很多,但是右边打boss的transition很少,这样的话训练出的DQN不知道怎么去打boss。在这个例子中右边的经验很少,所以更重要,要充分利用它,不然很容易被卡在boss关。
- 实际训练中算法怎么知道哪个transition更加重要呢?可以使用TD error来判断,TD error的值越大就越重要,应该给较高的优先级。这是应为训练出的DQN不熟悉右边的场景,所以会偏离TD target所以训练出来的TD error就比较大。所以要给右边更高的权重,使它更好的应对右边的场景。

-
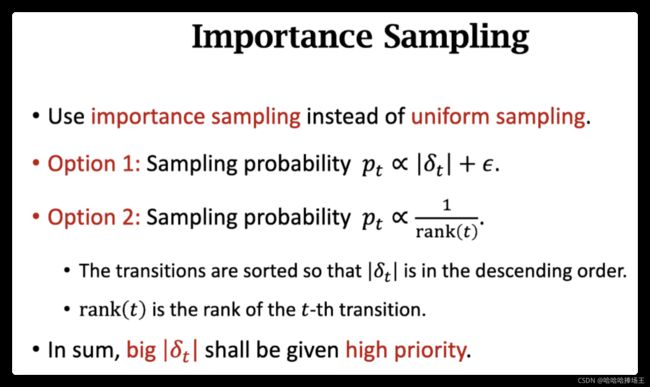
优先经验回放的基本想法就是使用非均匀抽样代替均匀抽样,下面介绍两种不同的抽样方法:
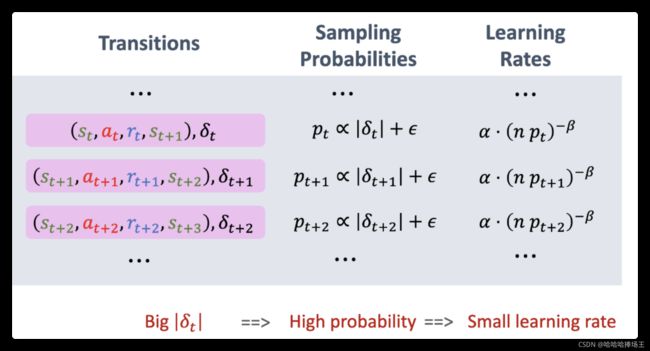
- 法1: 让抽样概率 p t p_t pt正比于TD error的绝对值再加上 ϵ \epsilon ϵ,这里 ϵ \epsilon ϵ是一个很小的数,它的作用是避免概率 p t p_t pt为0
- 法2: 对TD error的绝对值做一个排序,大的靠前,小的靠后,rank(t)是 δ t \delta _t δt的序号,让 p t p_t pt反比于rank(t), δ t \delta _t δt的绝对值越大,它的序号就越小,抽样概率 p t p_t pt的值就越大
- 总而言之,两种方法的思想是一样的, δ t \delta _t δt的值越大,被抽到的概率就越大。
- 抽样的时候是非均匀的,不同的transition有不同的抽样概率,这样会导致DQN的预测有偏差。应该相应调整学习率,抵消掉不同抽样概率造成的偏差。
- TD算法使用SGD来更新参数w,我们将学习率记为: α \alpha α,如果做均匀抽样所有的transition都应该有相同的学习率,如果做非均匀抽样,应该根据抽样概率来调整学习率。如果一个transition有较大的抽样概率,应该把它的学习率调的比较小。计算 ( n p t ) − β (np_t)^{-\beta} (npt)−β,将它乘到学习率上,这里的 β ∈ ( 0 , 1 ) \beta \in (0,1) β∈(0,1),均匀抽样是一个种特殊情况,抽样概率都为 1 n \frac{1}{n} n1,这样 n p t = 1 np_t=1 npt=1,不会影响学习率。如果是非均匀抽样,学习率会有所不同,对于较大的 p t p_t pt算出的值越小,会让学习率变小。这里的 β \beta β是一个超参数。论文中建议将 β \beta β从小到大。

- 为了做优先经验回放,要将每一条transition都计算TD error,如果一个transition还刚被收集到,还没有得到它的TD error,我们直接将它的权重设置为最大值,也就是它有最高的优先级。训练DQN的时候要对TD error做更新,每次我们使用一条transition的时候,我们需要重新计算它的TD error,这条transition就有了新的权重。

Summary
DQN的高估问题
- Target Network & Double DQN
Bootstapping
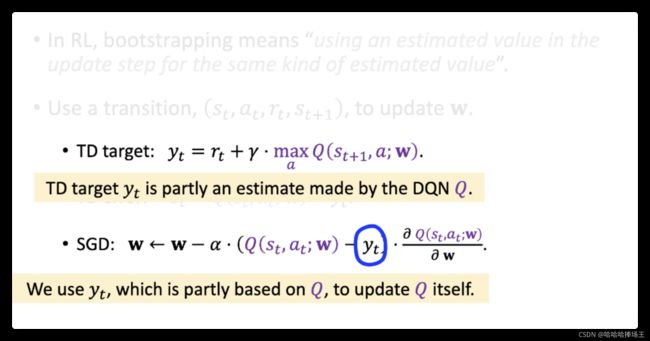
- 字面意思是:拔自己的鞋带,把自己举起来。也就是自举。听起来很荒谬。在统计和机器学习中非常的常用。在RL中bootstapping的意思是:用一个估算去估计同类的估算。也就是自己把自己给举起来。上面我们提高了使用一个transition来更新DQN的参数w。首先计算TD target记为: y t y_t yt,它部分基于观测到的奖励 r t r_t rt,部分基于DQN在t+1时刻的估计,我们希望DQN在t时刻的估计接近 y t y_t yt,两者的差就是TD error,希望TD error尽量小,所以采用SGD来更新参数w。在计算TD target的时候,我们既用到了真实值,也用到了DQN在t+1时刻的估计值,我们使用SGD去更新DQN的参数的时候用到了 y t y_t yt,这说明为了更新DQN在t时刻的估计,我们使用DQN在t+1时刻的估计,这就是用一个估计值去更新另一个估计值,相当于Bootstapping。
Problen of Oversestimation
- 使用TD算法更新DQN,会使DQN高估动作的价值。前面提到的Target Network和Double DQN就是为了解决这个问题。
- 高估的原因:
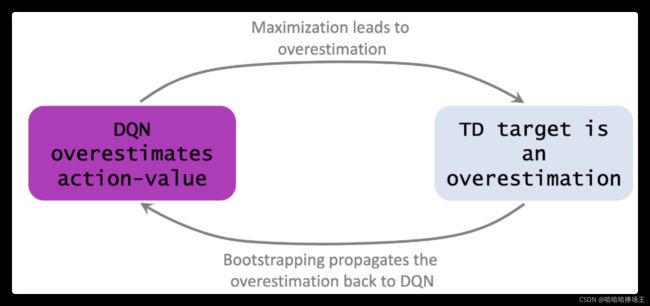
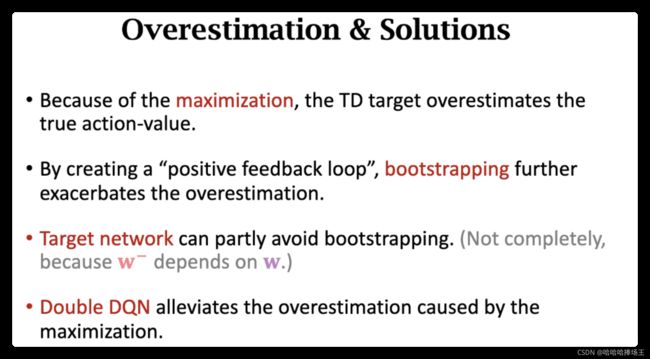
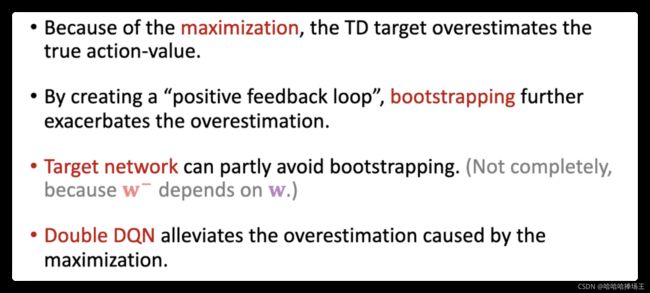
- 原因1:之前计算TD target使用了最大化,这会导致高估。这个最大化会导致值大于真实的动作价值
- 原因2:Bootstrapping。用自己的估计去更新自己,如果当前DQN已经高估,下一步的DQN将更加高估,一步一步使得高估更加严重。

-
最大化造成高估的原因
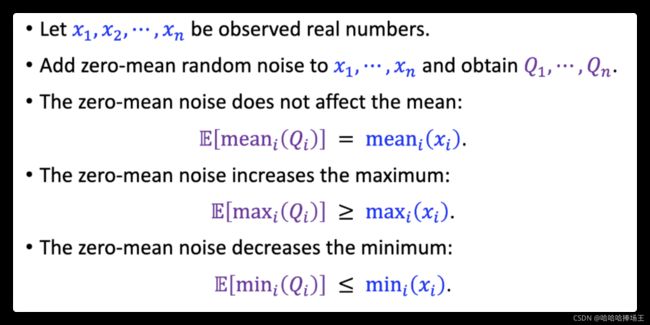
- 设 x 1 , x 2 , x 3 , ⋯ , x n x_1,x_2,x_3,\cdots,x_n x1,x2,x3,⋯,xn是观测到的实数
- 往 x 1 , x 2 , x 3 , ⋯ , x n x_1,x_2,x_3,\cdots,x_n x1,x2,x3,⋯,xn中添加均值为0的随机噪声,将获得的结果记为: Q 1 , Q 2 , . . . , Q n Q_1,Q_2,...,Q_n Q1,Q2,...,Qn
- 由于噪声的均值为0,这样噪声就不会影响Q的均值,对Q的均值求期望结果就是x的均值
- 但是噪声会让最大值增长,对Q的最大值求期望结果一定大于x的最大值
- 同样,随机噪声会让最小值变得更小,这样对Q的最小值求期望结果一定小于x的最小值
-
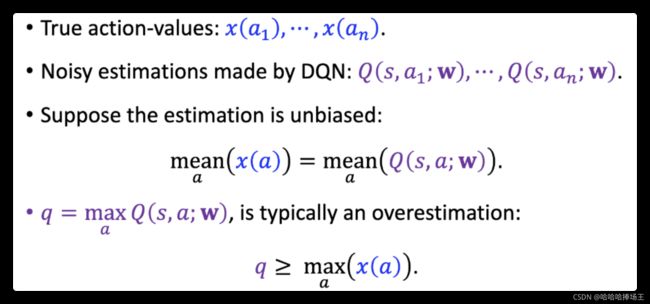
回到DQN的高估问题上来,设 x ( a t ) , . . . , x ( a n ) x(a_t),...,x(a_n) x(at),...,x(an)是真实的动作价值。 a 1 , . . . , a n a_1,...,a_n a1,...,an是动作空间中的所有的动作,我们不知道真实的动作价值,所以我们会使用DQN来估算这些价值,将DQN的估计值记为: Q ( s , a 1 ; w ) , . . . , Q ( s , a n ; w ) Q(s,a_1;w),...,Q(s,a_n;w) Q(s,a1;w),...,Q(s,an;w),估计肯定有误差。我们不妨假设DQN对真实值的误差的估计是无偏的,这样误差就相当于均值为0的噪声。计算TD target的时候,要对DQN的结果求最大化,把结果记为 q t q_t qt,之前我们知道往结果里面加上噪声,会使得期望高于真实值的期望。所以q是对x(a)的高估。
-
-
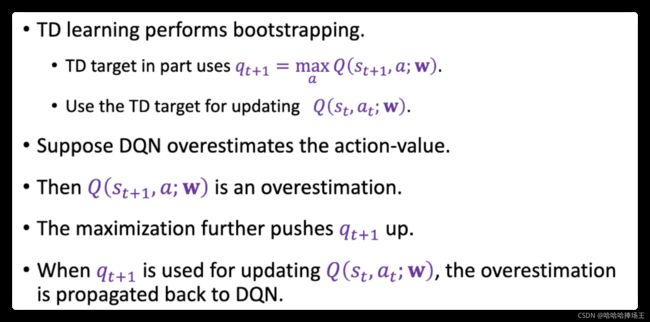
我们将DQN在t+1时刻的估计记为: q t + 1 q_{t+1} qt+1,我们刚刚得出结论, q t + 1 q_{t+1} qt+1是对真实值的高估。TD target部分依赖于 q t + 1 q_{t+1} qt+1,所以TD target也是高估。TD算法鼓励DQN接近于TD target,既然TD target是高估,那么更新之后的DQN也是高估。
-

-
Bootstrapping
- TD target用到了DQN在t+1时刻的估计值 q t + 1 q_{t+1} qt+1,我们拿TD target来更新DQN在t时刻的估计,这就是用DQN来更新DQN自己。这就是Bootstrapping,这会使高估变得更严重。假设DQN已经高估了动作价值,计算TD target的时候用到了DQN自己,注意这个DQN的输出已经大于真实价值了,然后最大化,上面我们也提到了最大化会高估动作价值,这里进一步高估动作价值,然后用 q t + 1 q_{t+1} qt+1来更新DQN,这样高估又被传播会DQN,使得高估变得更加严重。
Why does overestimation happen?
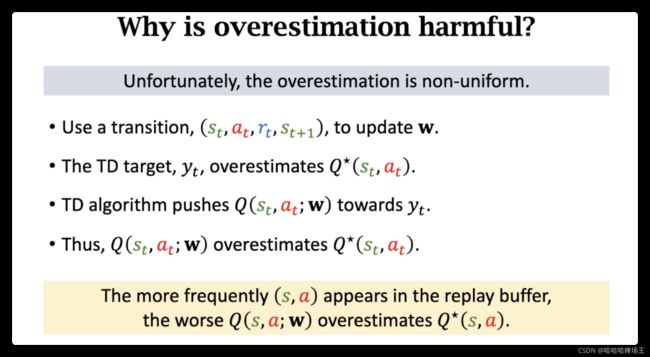
Why is overestimation a shortcoming?
- DQN的输入是当前的状态 s t s_t st,输出是执行所有动作的概率,最后会选择概率最高的动作执行。所以高估本身并不是问题,只要所有价值都被同等的高估。麻烦的事非均匀的高估,
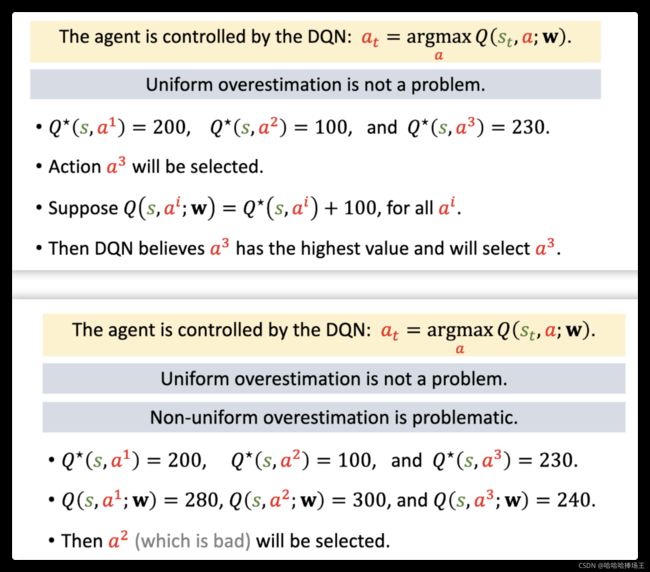
- 实际上,DQN的高估是非均匀的,有的被高估很多,有的被高估一点。原因:TD算法每次从Replay Buffer中取出一个transition去更新DQN参数w,前面我们知道,TD target是对真实的动作价值的高估,TD算法鼓励DQN的预测接近TD target,就会将DQN的估计值推高。状态s和动作a的二元组,每被用来更新DQN,就会让DQN高估s和a的价值,s和a在Replay Buffer中的频率是不均匀的,s和a在replay buffer中越频繁出现,就会让DQN对s和a的高估越严重。结论就是s和a在DQN中的高估是非均匀的,所以我们希望能避免高估。
Solution
- 解决方案一:避免Bootstapping,不要使用DQN自己来计算TD target,使用另一个神经网络来计算TD targert,另一个神经网络也被称为target network
- 解决方案二:Double DQN,用来缓解最大化造成的高估。它也使用target network,但是具体用法有一些区别,这个区别可以大幅度改善效果
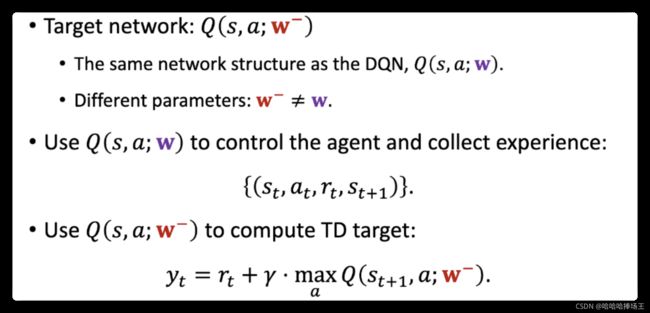
Target Network
- DQN是使用一个神经网络来近似动作价值函数,现在我们使用两个神经网络。第二个神经网络我们称为:Target Network. 两个神经网络的结构相同但是参数不同。将DQN的参数记作:w,将target network的参数记作: w − w^- w−,两个神经网络的用途不同,DQN用来控制Agent和收集经验(很多条transitions)。Target Network唯一的用途就是计算TD target。以前是自举,现在使用Target Network在一定程度上缓解了自举的问题。
TD Learning with Target Network
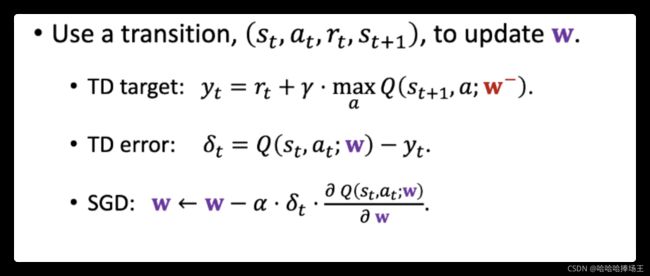
- 我们每次用一个transition来更新DQN的参数w,使用Target Network来计算TD target,这样可以避免Bootstapping,然后计算TD error,它是DQN的预测与TD target两者之差。最后使用SGD来更新DQN的参数w。注意这里SGD只更新DQN的参数,不更新Target network
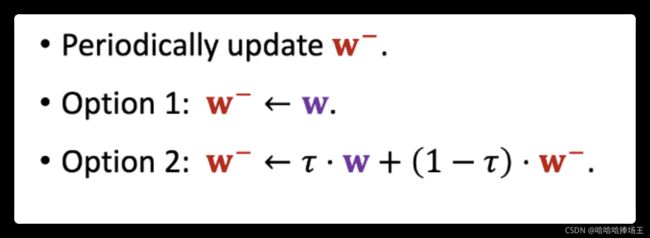
- Target Network的参数是 w − w^- w−,要隔一段时间更新一次
- 方式一:直接将DQN的w结果给 w − w^- w−
- 方式二:将DQN的参数w和 w − w^- w−做一个加权的平均,然后赋值给 w − w^- w−
- 使用target network与原来的DQN唯一的区别就是计算TD target。原始的方法使用DQN自己去计算TD target现在使用Target Network去计算TD target
Double DQN
- Double DQN可以更好的缓解高估的问题。
- 原始的DQN计算TD target,可以分为两步:第一步是找出能最大化Q函数的动作。第二步是使用上一步选出的动作带入DQN去,这两步都使用DQN这样表现很差,会严重高估动作的价值。

- 上面我们介绍的使用TD NetWork来计算TD target。和原始的一样,第一步是选出最大化Q函数的动作,这里使用的是target network。第二步是将上一步得到的动作带入,这里用的还是Target Network。上面原始方法两步都是用的DQN,这里两步都是用的Target Network,使用Target Network会让表现变得更好,但是高估还是很严重。

- 下面我们介绍一种计算TD target的方式Double DQN。首先做选择,选出最大化Q函数的动作,这一步使用的是DQN。第二步是计算TD target要把上一步找到的动作带入Q函数,这里用的是Target Network。

- Why does double DQN work better?
- Double DQN将计算TD target分解为两步
- 第一步:选择动作 a ∗ a^* a∗,用的是DQN本身
- 第二步:计算TD target,用的是Target Network
- 很容易证明下面的公式。
- Double DQN将计算TD target分解为两步

Summary

Dueling Network
Advantage Function
回顾
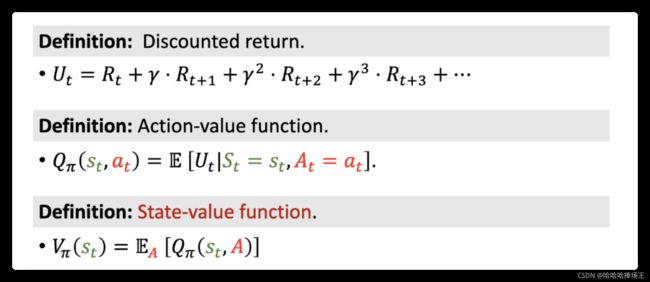
- 前面我们定义了折扣回报,它是从t时刻开始左右奖励的加权和,它依赖与未来的所有动作以及状态。我们还定义了动作价值函数为折扣回报的期望,他将未来的动作和状态的随机性都消除了。它依赖于当前的状态 s t s_t st、做出的动作 a t a_t at以及策略函数 π \pi π,在这一步我们使用期望将状态的随机性消除,我们定义了状态价值函数 V π V_{\pi} Vπ,它是动作价值函数对动作求期望。这样状态价值函数就只依赖于当前的状态 s t s_t st以及策略函数 π \pi π
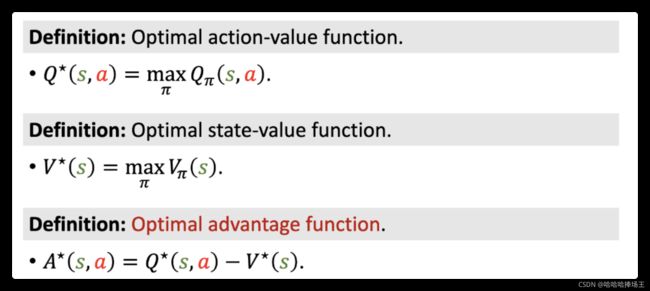
- 我们定义最优的动作价值函数为上面提到的 Q π ( s t , a t ) Q_{\pi}(s_t,a_t) Qπ(st,at)对策略函数 π \pi π求最大化,它可以评价在状态s的情况下,做动作a的好坏。定义最优的状态价值函数为上面的到的 V π ( s ) V_{\pi}(s) Vπ(s)对 π \pi π求最大化,它可以告诉我们当前状态的好坏。这样我们就可以定义最优的优势函数 A ∗ ( s , a ) = Q ∗ ( s , a ) − V ∗ ( s ) A^{*}(s,a)=Q^{*}(s,a)-V^{*}(s) A∗(s,a)=Q∗(s,a)−V∗(s),它的意思就是将 V ∗ ( s ) V^{*}(s) V∗(s)作为baseline,这样 A ∗ A^{*} A∗就表示动作a相对于baseline的优势,动作a相对于baseline效果越好, A ∗ A^{*} A∗的值就越大。
Properties of Advantage Function
- 定理1:最优动作价值函数 Q ∗ ( s , a ) Q^{*}(s,a) Q∗(s,a)关于动作a的最大值等于最优状态价值函数 V ∗ ( s ) V^{*}(s) V∗(s)
- 回顾我们上面的到的 A ∗ ( s , a ) = Q ∗ ( s , a ) − V ∗ ( s ) A^{*}(s,a)=Q^{*}(s,a)-V^{*}(s) A∗(s,a)=Q∗(s,a)−V∗(s),同时对等式两边求最大化等式也成立,这样我们就可以得到 m a x a A ∗ ( s , a ) = m a x a Q ∗ ( s , a ) − V ∗ ( s ) \underset{a}{max}A^{*}(s,a)=\underset{a}{max}Q^{*}(s,a)-V^{*}(s) amaxA∗(s,a)=amaxQ∗(s,a)−V∗(s),上面定理1保证了 m a x a Q ∗ ( s , a ) = V ∗ ( s ) \underset{a}{max}Q^{*}(s,a)=V^{*}(s) amaxQ∗(s,a)=V∗(s),这样等式右边为0,故优势函数 A ∗ ( s , a ) A^{*}(s,a) A∗(s,a)关于动作a的最大值为0.

- 将上面最优优势函数的定义转换一下就可以得到 Q ∗ ( s , a ) = V ∗ ( s ) + A ∗ ( s , a ) − m a x a A ∗ ( s , a ) Q^{*}(s,a)=V^{*}(s)+A^{*}(s,a)-\underset{a}{max}A^{*}(s,a) Q∗(s,a)=V∗(s)+A∗(s,a)−amaxA∗(s,a),前面我们得到 m a x a A ∗ ( s , a ) = 0 \underset{a}{max}A^{*}(s,a)=0 amaxA∗(s,a)=0,所以我们不妨在等式右边减去一个 m a x a A ∗ ( s , a ) \underset{a}{max}A^{*}(s,a) amaxA∗(s,a),

Dueling Network
Revisiting DQN
- DQN是神经网络对最优动作价值函数的近似
Approximating Advantage Function
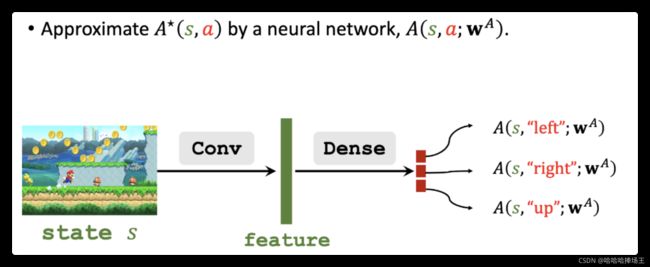
- 我们通过神经网络 A ∗ ( s , a ; w A ) A^{*}(s,a;w^{A}) A∗(s,a;wA)来近似 A ∗ ( s , a ) A^{*}(s,a) A∗(s,a),这里 w A w^A wA是神经网络的参数,神经网络的结构和DQN是一样的。
Approximating State-Value Function
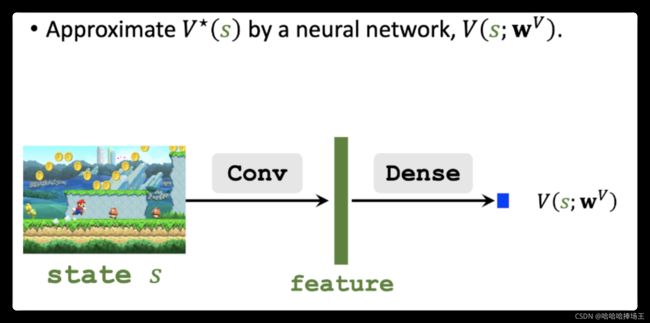
- 这里我们还需要一个神经网络来近似最优状态价值函数 V ∗ ( s ) V^{*}(s) V∗(s),这个神经网络的输入是状态s,这里输出是神经网络给状态s的打分。这里我们发现这个神经网络和上面的神经网络有相同的结构,真正实现的时候可以共享两个神经网络的参数。
Dueling Network:Formulation
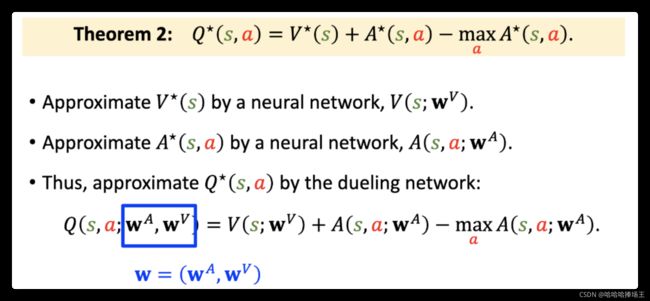
- Theorem 2: Q ∗ ( s , a ) = V ∗ ( s ) + A ∗ ( s , a ) − m a x a A ∗ ( s , a ) Q^{*}(s,a)=V^{*}(s)+A^{*}(s,a)-\underset{a}{max}A^{*}(s,a) Q∗(s,a)=V∗(s)+A∗(s,a)−amaxA∗(s,a)
- 上面我们使用了两个神经网络分别近似了状态价值函数和优势函数,替换定理二中的来几个函数,可以得到 Q ( s , a ; w A , w V ) Q(s,a;w^A,w^V) Q(s,a;wA,wV),它被称为Dueling Network。既然它是对动作价值函数的近似,那么它就和DQN有相同的作用,DQN有啥它就有啥,DQN怎么训练它就怎么训练。为了表示方便,后面使用w来表示它的参数。
Dueling Network
-
上面我们得到了Dueling Network的近似,它和DQN都是对动作价值函数的近似,所以它和DQN有相同的性质。
-
搭建Dueling Network:输入是状态s,使用一些卷积层来处理输入状态s,神经网络V和A共享卷积层参数。用一些全连接层得到的特征做变换得到一个输出向量,这个输出向量的元素对应优势函数给每个动作打的分数。使用一些全连接层将一个向量映射到一个实数,这个实数就是状态价值,表示当前状态的好坏。这样我们就得到了一个向量和一个实数,接下来我们使用这个实数和这个向量的每个元素分别相加,减去红色向量中的最大的元素,然后我们又可以得到一个向量,这个向量的大小和之前我们得到的向量是一样的,这个向量就是Dueling Network的最终的输出。输出的每一个元素对应了每个动作的价值,可以反映出动作的好坏。做决策的时候选出动作价值最大的动作,Agent执行这个动作。Dueling netwoek的输入和输出和DQN完全一样,功能也完全一样。

Training
- Dueling Network和DQN的输入和输出一样。
- 既然这里Dueling Network是对最优动作价值函数的近似,我们可以用Q-learning来训练Dueling Network,我们可以使用训练DQN的方式来训练Dueling Network。
Overcome Non-identifiability
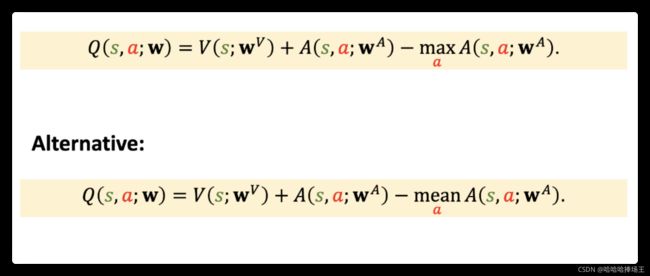
- 看一下上面的两个等式,两个等式都是对的,我们证明过 m a x a ( s , a ) \underset{a}{max}(s,a) amax(s,a)恒等于0,那么我们干嘛要用等式2呢?原因是因为等式1有一个缺点,我们无法通过 Q ∗ Q^{*} Q∗来唯一确定 V ∗ V^{*} V∗和 A ∗ A^{*} A∗。举例如下。这种不唯一性有什么危害呢?在上面Dueling Network的输出是通过 V ∗ + A ∗ V^*+A^* V∗+A∗的到的,如果这两个值的波动绝对值相等,方向相反,那么毫无差别。但是两个神经网络都不稳定,这样的话就有危害了。这样加上对优势函数求最大化就可以更加稳定。但是实际操作中换成mean更加稳定,没有理论依据,就是实验效果好。
Summary
