世界坐标系/相机坐标系/图像坐标系 转换
目录
-
- 一、各坐标系简要介绍
- 二、坐标系转换
-
- 2.1 世界坐标系转为相机坐标系
- 2.2 相机坐标系转为物理图像坐标系
- 2.3 物理图像坐标系转为图像坐标系
- 2.4 总结
- 2.5 为什么要使用齐次坐标
- 参考文献
一、各坐标系简要介绍
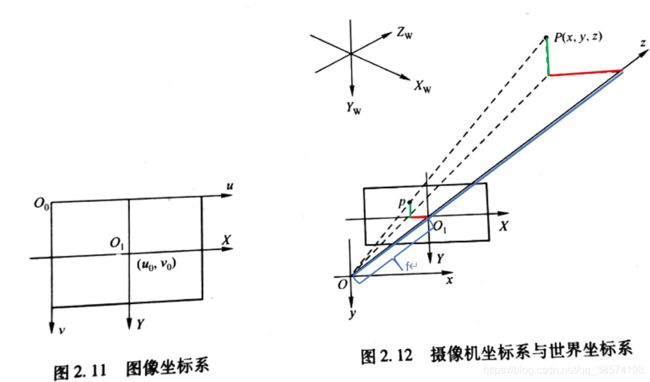
首先介绍数字图像处理领域中的图像坐标系,如上图左图所示,坐标系O_0为图像坐标系,其原点是在图像的左上角,每一个像素通过其所在位置的列数和行数索引 (u,v) 来表示。
另外需要建立图像坐标与物理单位的关系,而后才能将目标的真实世界坐标转换为图像坐标。即建立以物理单位表示的物理图像坐标系(有些文章将这个坐标系称为图像坐标系,而将数字图像中的坐标系称为像素坐标系,但是本文延续大多数把数字图像的坐标系称为图像坐标系的习惯,就把此坐标系称为物理图像坐标系),即上图左图中的坐标系O_1,其横纵轴用X,Y来标识,单位一般为mm(根据具体成像设备而定,不过单位不会影响坐标系的转换)。
再介绍世界坐标系与相机坐标系,如上图右图所示,坐标系O为相机坐标系,为一个3维坐标系,各维度分别用x,y,z表示,z轴称为摄像机光轴,与图像平面垂直,并且交点O_1为物理图像坐标系的原点。
上图右图左上角为世界坐标系,可以用来描述环境内的任何物体的位置,包括相机的位置,其各轴用X_w,Y_w,Z_w来标识。并且世界坐标系可以通过旋转与平移转换为相机坐标系。
二、坐标系转换
2.1 世界坐标系转为相机坐标系
点P为空间中的任一点,设其世界坐标系下的坐标为(X_w,Y_w,Z_w), 相机坐标系下的坐标为(x,y,z), 则可以通过相机坐标系与世界坐标系的关系可以由(X_w,Y_w,Z_w)计算(x,y,z):
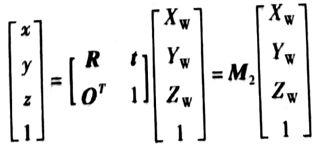
R, t 分别为3×3的旋转矩阵和3×1的平移向量。
2.2 相机坐标系转为物理图像坐标系
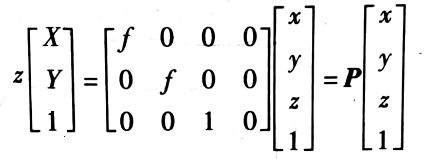
由第一节中图的右图所示,p为P在图像平面上的投影,设p的物理图像坐标为(X, Y), P的相机坐标系坐标为(x, y, z),则根据比例关系得:

其中f为焦距,转为齐次坐标+矩阵形式为:
2.3 物理图像坐标系转为图像坐标系
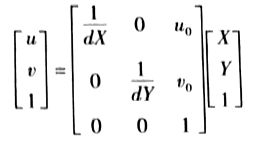
设物理图像坐标系的原点在图像坐标系的位置为(u_0,v_0)(一般在图像的中心,不过有时候会存在偏差等)。对于物理图像坐标系中的任意一点(X,Y)都可以转换为图像坐标系中的坐标(u, v):
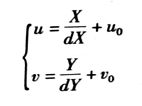
其中dX, dY 是成像元件的每个像素所对应的物理宽高,单位一般为mm。u_0, v_0, dX, dY 均为相机的固有参数。
通过齐次坐标将其写成矩阵形式:
2.4 总结
结合上述公式即可以将任意一点的世界坐标转换为图像坐标:
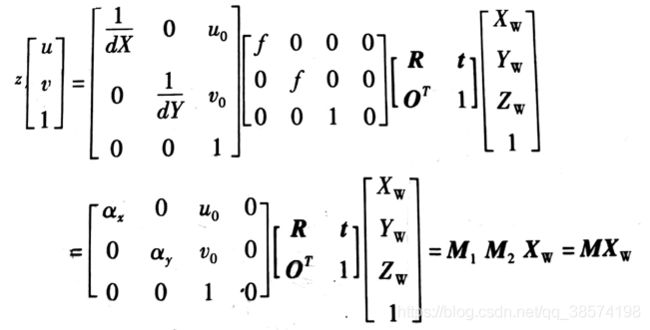
M1,M2分别仅与相机的内外参数相关。
由上式可知,当给出目标的世界坐标时,可以得到三个方程,消去z后可求得(u, v)
反之给出图像坐标(u, v)并不能求得其唯一的世界坐标,因为矩阵M为3×4维,不可逆,仅能解得一个射线方程,即该射线上的点投影均为(u, v)
2.5 为什么要使用齐次坐标
(个人思考)
假如不使用齐次坐标的话,物理图像坐标系转为图像坐标系的矩阵将为2×3维,而相机坐标系转物理图像坐标系的矩阵变为2×3维,这两个矩阵分别为2.4节公式第一行等号右边的前两个矩阵,可以看出,不使用齐次坐标的话矩阵无法相乘,那就无法完成坐标转换。
参考文献
《机器视觉理论及应用》 电子工业出版社
本文仅为本人学习过程中的笔记以及一些个人思考,文中如有错误的地方还请指正