利用yolov4进行手写数字识别
识别效果
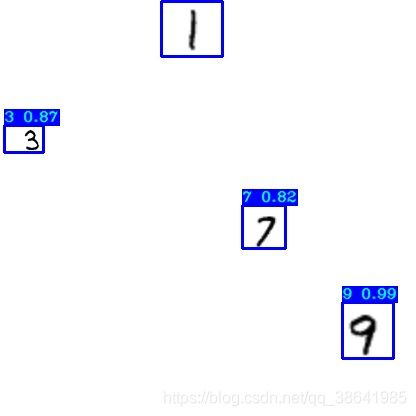
训练20000次
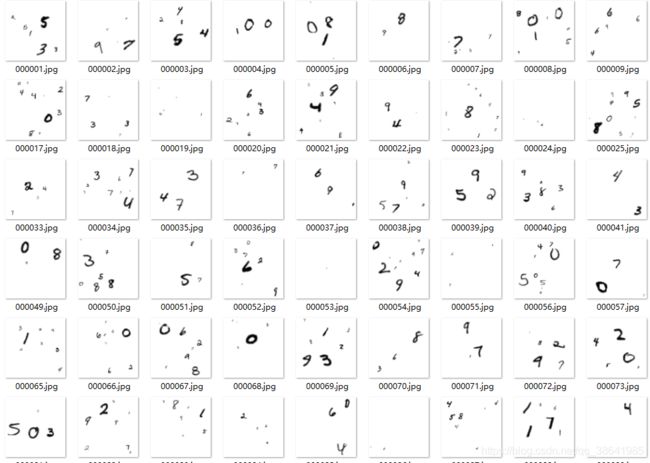
数据集
下载,https://download.csdn.net/download/qq_38641985/18963935
图片
标记

参考
https://github.com/theAIGuysCode/tensorflow-yolov4-tflite
修改配置
#! /usr/bin/env python
# coding=utf-8
from easydict import EasyDict as edict
__C = edict()
# Consumers can get config by: from config import cfg
cfg = __C
# YOLO options
__C.YOLO = edict()
__C.YOLO.CLASSES = "./mnist/mnist.names"
__C.YOLO.ANCHORS = [12,16, 19,36, 40,28, 36,75, 76,55, 72,146, 142,110, 192,243, 459,401]
__C.YOLO.ANCHORS_V3 = [10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326]
__C.YOLO.ANCHORS_TINY = [23,27, 37,58, 81,82, 81,82, 135,169, 344,319]
__C.YOLO.STRIDES = [8, 16, 32]
__C.YOLO.STRIDES_TINY = [16, 32]
__C.YOLO.XYSCALE = [1.2, 1.1, 1.05]
__C.YOLO.XYSCALE_TINY = [1.05, 1.05]
__C.YOLO.ANCHOR_PER_SCALE = 3
__C.YOLO.IOU_LOSS_THRESH = 0.5
# Train options
__C.TRAIN = edict()
__C.TRAIN.ANNOT_PATH = "./mnist/mnist_train.txt"
__C.TRAIN.BATCH_SIZE = 1
# __C.TRAIN.INPUT_SIZE = [320, 352, 384, 416, 448, 480, 512, 544, 576, 608]
__C.TRAIN.INPUT_SIZE = 224
__C.TRAIN.DATA_AUG = True
__C.TRAIN.LR_INIT = 1e-3
__C.TRAIN.LR_END = 1e-6
__C.TRAIN.WARMUP_EPOCHS = 2
__C.TRAIN.FISRT_STAGE_EPOCHS = 20
__C.TRAIN.SECOND_STAGE_EPOCHS = 30
# TEST options
__C.TEST = edict()
__C.TEST.ANNOT_PATH = "./mnist/mnist_test.txt"
__C.TEST.BATCH_SIZE = 1
__C.TEST.INPUT_SIZE = 224
__C.TEST.DATA_AUG = False
__C.TEST.DECTECTED_IMAGE_PATH = "./mnist/mnist_test/"
__C.TEST.SCORE_THRESHOLD = 0.25
__C.TEST.IOU_THRESHOLD = 0.5
YOLO_TYPE = "yolov4" # yolov4 or yolov3
YOLO_FRAMEWORK = "tf" # "tf" or "trt"
YOLO_V3_WEIGHTS = "model_data/yolov3.weights"
YOLO_V4_WEIGHTS = "model_data/yolov4.weights"
YOLO_V3_TINY_WEIGHTS = "model_data/yolov3-tiny.weights"
YOLO_V4_TINY_WEIGHTS = "model_data/yolov4-tiny.weights"
YOLO_TRT_QUANTIZE_MODE = "INT8" # INT8, FP16, FP32
YOLO_CUSTOM_WEIGHTS = False # "checkpoints/yolov3_custom" # used in evaluate_mAP.py and custom model detection, if not using leave False
# YOLO_CUSTOM_WEIGHTS also used with TensorRT and custom model detection
YOLO_COCO_CLASSES = "mnist/mnist.names"
YOLO_STRIDES = [8, 16, 32]
YOLO_IOU_LOSS_THRESH = 0.5
YOLO_ANCHOR_PER_SCALE = 3
YOLO_MAX_BBOX_PER_SCALE = 100
YOLO_INPUT_SIZE = 416
if YOLO_TYPE == "yolov4":
YOLO_ANCHORS = [[[12, 16], [19, 36], [40, 28]],
[[36, 75], [76, 55], [72, 146]],
[[142,110], [192, 243], [459, 401]]]
if YOLO_TYPE == "yolov3":
YOLO_ANCHORS = [[[10, 13], [16, 30], [33, 23]],
[[30, 61], [62, 45], [59, 119]],
[[116, 90], [156, 198], [373, 326]]]
# Train options
TRAIN_YOLO_TINY = False
TRAIN_SAVE_BEST_ONLY = True # saves only best model according validation loss (True recommended)
TRAIN_SAVE_CHECKPOINT = True # saves all best validated checkpoints in training process (may require a lot disk space) (False recommended)
TRAIN_CLASSES = "mnist/mnist.names"
TRAIN_ANNOT_PATH = "mnist/mnist_train.txt"
TRAIN_LOGDIR = "log"
TRAIN_CHECKPOINTS_FOLDER = "checkpoints"
TRAIN_MODEL_NAME = f"{YOLO_TYPE}_custom"
TRAIN_LOAD_IMAGES_TO_RAM = True # With True faster training, but need more RAM
TRAIN_BATCH_SIZE = 1
TRAIN_INPUT_SIZE = 224
TRAIN_DATA_AUG = True
TRAIN_TRANSFER = True
TRAIN_FROM_CHECKPOINT = False # "checkpoints/yolov3_custom"
TRAIN_LR_INIT = 1e-4
TRAIN_LR_END = 1e-6
TRAIN_WARMUP_EPOCHS = 2
TRAIN_EPOCHS = 100
# TEST options
TEST_ANNOT_PATH = "mnist/mnist_test.txt"
TEST_BATCH_SIZE = 1
TEST_INPUT_SIZE = 224
TEST_DATA_AUG = False
TEST_DECTECTED_IMAGE_PATH = ""
TEST_SCORE_THRESHOLD = 0.3
TEST_IOU_THRESHOLD = 0.45
训练
python train.py --model yolov4 --weights ./model/yolov4.weights

识别
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
import cv2
import numpy as np
import random
import colorsys
import time
import tensorflow as tf
from tensorflow.keras.layers import Conv2D, Input
from core.config import *
from core.yolov4 import *
YOLO_STRIDES = [8, 16, 32]
STRIDES = np.array(YOLO_STRIDES)
ANCHORS = (np.array(YOLO_ANCHORS).T/STRIDES).T
def detect_image(Yolo, image_path, output_path, input_size=416, show=False, CLASSES=YOLO_COCO_CLASSES, score_threshold=0.3, iou_threshold=0.45, rectangle_colors=''):
original_image = cv2.imread(image_path)
original_image = cv2.cvtColor(original_image, cv2.COLOR_BGR2RGB)
original_image = cv2.cvtColor(original_image, cv2.COLOR_BGR2RGB)
image_data = image_preprocess(np.copy(original_image), [input_size, input_size])
image_data = image_data[np.newaxis, ...].astype(np.float32)
if YOLO_FRAMEWORK == "tf":
pred_bbox = Yolo.predict(image_data)
elif YOLO_FRAMEWORK == "trt":
batched_input = tf.constant(image_data)
result = Yolo(batched_input)
pred_bbox = []
for key, value in result.items():
value = value.numpy()
pred_bbox.append(value)
pred_bbox = [tf.reshape(x, (-1, tf.shape(x)[-1])) for x in pred_bbox]
pred_bbox = tf.concat(pred_bbox, axis=0)
bboxes = postprocess_boxes(pred_bbox, original_image, input_size, score_threshold)
bboxes = nms(bboxes, iou_threshold, method='nms')
image = draw_bbox(original_image, bboxes, CLASSES=CLASSES, rectangle_colors=rectangle_colors)
# CreateXMLfile("XML_Detections", str(int(time.time())), original_image, bboxes, read_class_names(CLASSES))
if output_path != '': cv2.imwrite(output_path, image)
if show:
# Show the image
cv2.imshow("predicted image", image)
# Load and hold the image
cv2.waitKey(0)
# To close the window after the required kill value was provided
cv2.destroyAllWindows()
return image
def postprocess_boxes(pred_bbox, original_image, input_size, score_threshold):
valid_scale=[0, np.inf]
pred_bbox = np.array(pred_bbox)
pred_xywh = pred_bbox[:, 0:4]
pred_conf = pred_bbox[:, 4]
pred_prob = pred_bbox[:, 5:]
# 1. (x, y, w, h) --> (xmin, ymin, xmax, ymax)
pred_coor = np.concatenate([pred_xywh[:, :2] - pred_xywh[:, 2:] * 0.5,
pred_xywh[:, :2] + pred_xywh[:, 2:] * 0.5], axis=-1)
# 2. (xmin, ymin, xmax, ymax) -> (xmin_org, ymin_org, xmax_org, ymax_org)
org_h, org_w = original_image.shape[:2]
resize_ratio = min(input_size / org_w, input_size / org_h)
dw = (input_size - resize_ratio * org_w) / 2
dh = (input_size - resize_ratio * org_h) / 2
pred_coor[:, 0::2] = 1.0 * (pred_coor[:, 0::2] - dw) / resize_ratio
pred_coor[:, 1::2] = 1.0 * (pred_coor[:, 1::2] - dh) / resize_ratio
# 3. clip some boxes those are out of range
pred_coor = np.concatenate([np.maximum(pred_coor[:, :2], [0, 0]),
np.minimum(pred_coor[:, 2:], [org_w - 1, org_h - 1])], axis=-1)
invalid_mask = np.logical_or((pred_coor[:, 0] > pred_coor[:, 2]), (pred_coor[:, 1] > pred_coor[:, 3]))
pred_coor[invalid_mask] = 0
# 4. discard some invalid boxes
bboxes_scale = np.sqrt(np.multiply.reduce(pred_coor[:, 2:4] - pred_coor[:, 0:2], axis=-1))
scale_mask = np.logical_and((valid_scale[0] < bboxes_scale), (bboxes_scale < valid_scale[1]))
# 5. discard boxes with low scores
classes = np.argmax(pred_prob, axis=-1)
scores = pred_conf * pred_prob[np.arange(len(pred_coor)), classes]
score_mask = scores > score_threshold
mask = np.logical_and(scale_mask, score_mask)
coors, scores, classes = pred_coor[mask], scores[mask], classes[mask]
return np.concatenate([coors, scores[:, np.newaxis], classes[:, np.newaxis]], axis=-1)
def bboxes_iou(boxes1, boxes2):
boxes1 = np.array(boxes1)
boxes2 = np.array(boxes2)
boxes1_area = (boxes1[..., 2] - boxes1[..., 0]) * (boxes1[..., 3] - boxes1[..., 1])
boxes2_area = (boxes2[..., 2] - boxes2[..., 0]) * (boxes2[..., 3] - boxes2[..., 1])
left_up = np.maximum(boxes1[..., :2], boxes2[..., :2])
right_down = np.minimum(boxes1[..., 2:], boxes2[..., 2:])
inter_section = np.maximum(right_down - left_up, 0.0)
inter_area = inter_section[..., 0] * inter_section[..., 1]
union_area = boxes1_area + boxes2_area - inter_area
ious = np.maximum(1.0 * inter_area / union_area, np.finfo(np.float32).eps)
return ious
def draw_bbox(image, bboxes, CLASSES=YOLO_COCO_CLASSES, show_label=True, show_confidence = True, Text_colors=(255,255,0), rectangle_colors='', tracking=False):
NUM_CLASS = read_class_names(CLASSES)
num_classes = len(NUM_CLASS)
image_h, image_w, _ = image.shape
hsv_tuples = [(1.0 * x / num_classes, 1., 1.) for x in range(num_classes)]
#print("hsv_tuples", hsv_tuples)
colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
colors = list(map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)), colors))
random.seed(0)
random.shuffle(colors)
random.seed(None)
for i, bbox in enumerate(bboxes):
coor = np.array(bbox[:4], dtype=np.int32)
score = bbox[4]
class_ind = int(bbox[5])
bbox_color = rectangle_colors if rectangle_colors != '' else colors[class_ind]
bbox_thick = int(0.6 * (image_h + image_w) / 1000)
if bbox_thick < 1: bbox_thick = 1
fontScale = 0.75 * bbox_thick
(x1, y1), (x2, y2) = (coor[0], coor[1]), (coor[2], coor[3])
# put object rectangle
cv2.rectangle(image, (x1, y1), (x2, y2), bbox_color, bbox_thick*2)
if show_label:
# get text label
score_str = " {:.2f}".format(score) if show_confidence else ""
if tracking: score_str = " "+str(score)
try:
label = "{}".format(NUM_CLASS[class_ind]) + score_str
except KeyError:
print("You received KeyError, this might be that you are trying to use yolo original weights")
print("while using custom classes, if using custom model in configs.py set YOLO_CUSTOM_WEIGHTS = True")
# get text size
(text_width, text_height), baseline = cv2.getTextSize(label, cv2.FONT_HERSHEY_COMPLEX_SMALL,
fontScale, thickness=bbox_thick)
# put filled text rectangle
cv2.rectangle(image, (x1, y1), (x1 + text_width, y1 - text_height - baseline), bbox_color, thickness=cv2.FILLED)
# put text above rectangle
cv2.putText(image, label, (x1, y1-4), cv2.FONT_HERSHEY_COMPLEX_SMALL,
fontScale, Text_colors, bbox_thick, lineType=cv2.LINE_AA)
return image
def nms(bboxes, iou_threshold, sigma=0.3, method='nms'):
"""
:param bboxes: (xmin, ymin, xmax, ymax, score, class)
Note: soft-nms, https://arxiv.org/pdf/1704.04503.pdf
https://github.com/bharatsingh430/soft-nms
"""
classes_in_img = list(set(bboxes[:, 5]))
best_bboxes = []
for cls in classes_in_img:
cls_mask = (bboxes[:, 5] == cls)
cls_bboxes = bboxes[cls_mask]
# Process 1: Determine whether the number of bounding boxes is greater than 0
while len(cls_bboxes) > 0:
# Process 2: Select the bounding box with the highest score according to socre order A
max_ind = np.argmax(cls_bboxes[:, 4])
best_bbox = cls_bboxes[max_ind]
best_bboxes.append(best_bbox)
cls_bboxes = np.concatenate([cls_bboxes[: max_ind], cls_bboxes[max_ind + 1:]])
# Process 3: Calculate this bounding box A and
# Remain all iou of the bounding box and remove those bounding boxes whose iou value is higher than the threshold
iou = bboxes_iou(best_bbox[np.newaxis, :4], cls_bboxes[:, :4])
weight = np.ones((len(iou),), dtype=np.float32)
assert method in ['nms', 'soft-nms']
if method == 'nms':
iou_mask = iou > iou_threshold
weight[iou_mask] = 0.0
if method == 'soft-nms':
weight = np.exp(-(1.0 * iou ** 2 / sigma))
cls_bboxes[:, 4] = cls_bboxes[:, 4] * weight
score_mask = cls_bboxes[:, 4] > 0.
cls_bboxes = cls_bboxes[score_mask]
return best_bboxes
def image_preprocess(image, target_size, gt_boxes=None):
ih, iw = target_size
h, w, _ = image.shape
scale = min(iw/w, ih/h)
nw, nh = int(scale * w), int(scale * h)
image_resized = cv2.resize(image, (nw, nh))
image_paded = np.full(shape=[ih, iw, 3], fill_value=128.0)
dw, dh = (iw - nw) // 2, (ih-nh) // 2
image_paded[dh:nh+dh, dw:nw+dw, :] = image_resized
image_paded = image_paded / 255.
if gt_boxes is None:
return image_paded
else:
gt_boxes[:, [0, 2]] = gt_boxes[:, [0, 2]] * scale + dw
gt_boxes[:, [1, 3]] = gt_boxes[:, [1, 3]] * scale + dh
return image_paded, gt_boxes
def read_class_names(class_file_name):
# loads class name from a file
names = {}
with open(class_file_name, 'r') as data:
for ID, name in enumerate(data):
names[ID] = name.strip('\n')
return names
def decode(conv_output, NUM_CLASS, i=0):
# where i = 0, 1 or 2 to correspond to the three grid scales
conv_shape = tf.shape(conv_output)
batch_size = conv_shape[0]
output_size = conv_shape[1]
conv_output = tf.reshape(conv_output, (batch_size, output_size, output_size, 3, 5 + NUM_CLASS))
#conv_raw_dxdy = conv_output[:, :, :, :, 0:2] # offset of center position
#conv_raw_dwdh = conv_output[:, :, :, :, 2:4] # Prediction box length and width offset
#conv_raw_conf = conv_output[:, :, :, :, 4:5] # confidence of the prediction box
#conv_raw_prob = conv_output[:, :, :, :, 5: ] # category probability of the prediction box
conv_raw_dxdy, conv_raw_dwdh, conv_raw_conf, conv_raw_prob = tf.split(conv_output, (2, 2, 1, NUM_CLASS), axis=-1)
# next need Draw the grid. Where output_size is equal to 13, 26 or 52
#y = tf.range(output_size, dtype=tf.int32)
#y = tf.expand_dims(y, -1)
#y = tf.tile(y, [1, output_size])
#x = tf.range(output_size,dtype=tf.int32)
#x = tf.expand_dims(x, 0)
#x = tf.tile(x, [output_size, 1])
xy_grid = tf.meshgrid(tf.range(output_size), tf.range(output_size))
xy_grid = tf.expand_dims(tf.stack(xy_grid, axis=-1), axis=2) # [gx, gy, 1, 2]
xy_grid = tf.tile(tf.expand_dims(xy_grid, axis=0), [batch_size, 1, 1, 3, 1])
xy_grid = tf.cast(xy_grid, tf.float32)
#xy_grid = tf.concat([x[:, :, tf.newaxis], y[:, :, tf.newaxis]], axis=-1)
#xy_grid = tf.tile(xy_grid[tf.newaxis, :, :, tf.newaxis, :], [batch_size, 1, 1, 3, 1])
#y_grid = tf.cast(xy_grid, tf.float32)
# Calculate the center position of the prediction box:
pred_xy = (tf.sigmoid(conv_raw_dxdy) + xy_grid) * STRIDES[i]
# Calculate the length and width of the prediction box:
pred_wh = (tf.exp(conv_raw_dwdh) * ANCHORS[i]) * STRIDES[i]
pred_xywh = tf.concat([pred_xy, pred_wh], axis=-1)
pred_conf = tf.sigmoid(conv_raw_conf) # object box calculates the predicted confidence
pred_prob = tf.sigmoid(conv_raw_prob) # calculating the predicted probability category box object
# calculating the predicted probability category box object
return tf.concat([pred_xywh, pred_conf, pred_prob], axis=-1)
def Create_Yolo(input_size=416, channels=3, training=False, CLASSES=YOLO_COCO_CLASSES):
NUM_CLASS = len(read_class_names(CLASSES))
input_layer = Input([input_size, input_size, channels])
if TRAIN_YOLO_TINY:
if YOLO_TYPE == "yolov4":
conv_tensors = YOLOv4_tiny(input_layer, NUM_CLASS)
if YOLO_TYPE == "yolov3":
conv_tensors = YOLOv3_tiny(input_layer, NUM_CLASS)
else:
if YOLO_TYPE == "yolov4":
conv_tensors = YOLOv4(input_layer, NUM_CLASS)
if YOLO_TYPE == "yolov3":
conv_tensors = YOLOv3(input_layer, NUM_CLASS)
output_tensors = []
for i, conv_tensor in enumerate(conv_tensors):
pred_tensor = decode(conv_tensor, NUM_CLASS, i)
if training: output_tensors.append(conv_tensor)
output_tensors.append(pred_tensor)
Yolo = tf.keras.Model(input_layer, output_tensors)
return Yolo
def main():
ID = random.randint(0, 200)
label_txt = "mnist/mnist_test.txt"
image_info = open(label_txt).readlines()[ID].split()
image_path = image_info[0]
yolo = Create_Yolo(input_size=YOLO_INPUT_SIZE, CLASSES=TRAIN_CLASSES)
yolo.load_weights(f"./checkpoints/yolov4_custom/yolov4") # use keras weights
detect_image(yolo, image_path, "txt.jpg", input_size=YOLO_INPUT_SIZE, show=True, CLASSES=TRAIN_CLASSES, rectangle_colors=(255,0,0))
main()
说明,这里使用的是keras模型
模型转换pb
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
import numpy as np
import sys
import tensorflow as tf
from core.yolov4 import YOLOv4
from tensorflow.keras.layers import Input
TRAIN_CLASSES = "mnist/mnist.names"
TRAIN_YOLO_TINY = False
YOLO_TYPE = "yolov4"
STRIDES = [8, 16, 32]
ANCHORS = [[[12, 16], [19, 36], [40, 28]],
[[36, 75], [76, 55], [72, 146]],
[[142,110], [192, 243], [459, 401]]]
STRIDES = np.array(STRIDES)
ANCHORS = (np.array(ANCHORS).T/STRIDES).T
def decode_tf(conv_output, output_size, NUM_CLASS, STRIDES, ANCHORS, i=0, XYSCALE=[1, 1, 1]):
batch_size = tf.shape(conv_output)[0]
conv_output = tf.reshape(conv_output,
(batch_size, output_size, output_size, 3, 5 + NUM_CLASS))
conv_raw_dxdy, conv_raw_dwdh, conv_raw_conf, conv_raw_prob = tf.split(conv_output, (2, 2, 1, NUM_CLASS),
axis=-1)
xy_grid = tf.meshgrid(tf.range(output_size), tf.range(output_size))
xy_grid = tf.expand_dims(tf.stack(xy_grid, axis=-1), axis=2) # [gx, gy, 1, 2]
xy_grid = tf.tile(tf.expand_dims(xy_grid, axis=0), [batch_size, 1, 1, 3, 1])
xy_grid = tf.cast(xy_grid, tf.float32)
pred_xy = ((tf.sigmoid(conv_raw_dxdy) * XYSCALE[i]) - 0.5 * (XYSCALE[i] - 1) + xy_grid) * \
STRIDES[i]
pred_wh = (tf.exp(conv_raw_dwdh) * ANCHORS[i])
pred_xywh = tf.concat([pred_xy, pred_wh], axis=-1)
pred_conf = tf.sigmoid(conv_raw_conf)
pred_prob = tf.sigmoid(conv_raw_prob)
pred_prob = pred_conf * pred_prob
pred_prob = tf.reshape(pred_prob, (batch_size, -1, NUM_CLASS))
pred_xywh = tf.reshape(pred_xywh, (batch_size, -1, 4))
return pred_xywh, pred_prob
def decode(conv_output, output_size, NUM_CLASS, i, XYSCALE=[1,1,1], FRAMEWORK='tf'):
if FRAMEWORK == 'trt':
return decode_trt(conv_output, output_size, NUM_CLASS, STRIDES, ANCHORS, i=i, XYSCALE=XYSCALE)
elif FRAMEWORK == 'tflite':
return decode_tflite(conv_output, output_size, NUM_CLASS, STRIDES, ANCHORS, i=i, XYSCALE=XYSCALE)
else:
return decode_tf(conv_output, output_size, NUM_CLASS, STRIDES, ANCHORS, i=i, XYSCALE=XYSCALE)
def read_class_names(class_file_name):
# loads class name from a file
names = {}
with open(class_file_name, 'r') as data:
for ID, name in enumerate(data):
names[ID] = name.strip('\n')
return names
def Create_Yolo(input_size=416, channels=3, training=False, CLASSES=TRAIN_CLASSES):
NUM_CLASS = len(read_class_names(CLASSES))
input_layer = Input([input_size, input_size, channels])
if TRAIN_YOLO_TINY:
if YOLO_TYPE == "yolov4":
conv_tensors = YOLOv4_tiny(input_layer, NUM_CLASS)
else:
if YOLO_TYPE == "yolov4":
conv_tensors = YOLOv4(input_layer, NUM_CLASS)
output_tensors = []
for i, conv_tensor in enumerate(conv_tensors):
pred_tensor = decode(conv_tensor,input_size, NUM_CLASS, i)
if training: output_tensors.append(conv_tensor)
output_tensors.append(pred_tensor)
Yolo = tf.keras.Model(input_layer, output_tensors)
return Yolo
yolo = Create_Yolo(input_size=224, CLASSES=TRAIN_CLASSES)
Darknet_weights="checkpoints/yolo224/yolov4"
yolo.load_weights(Darknet_weights) # use custom weights
yolo.summary()
yolo.save(f'./checkpoints/my_model')
print(f"model saves to /checkpoints/my_model")
说明,模型转换虽然成功(keras模型->pb模型),但是调用报错,暂时未解决。
暂时使用keras模型
我的项目
https://download.csdn.net/download/qq_38641985/18963831