opencv-python实现图像拼接和图像识别(机器视觉)
三.算法实现
3.1.图像拼接
3.1.1思路
- 提取待拼接图片的特征点、特征描述符,找到待拼接图片的对应的位置点,进行匹配
- 对图片进行柱面投影,产生图像的扭曲效果
- 设置阈值,当匹配点个数达到阈值后,进行图像拼接
- 在拼接前,先对第二张图片进行透视变化,利用已经找到的关键点,使得第二张图片透视旋转到与第一张图片可以进行拼接的角度
- 加权处理,使拼接图接缝处平滑过渡
3.1.2 实现方法
-
提取特征点、描述符:使用opencv创建SURF对象,Hessian算法检测关键点。调节SURF对象的参数,在可接受范围内减少关键点、减少获取的向量的维度、不检测关键点的方向,以便加快提取速度
cv2.xfeatures2d.SURF_create ([hessianThreshold[, nOctaves[, nOctaveLayers[, extended[, upright]]]]]) #该函数可生成SURF对象,改变hessian Threshold来控制关键点的数量 cv2.SURF.detectAndCompute(image, mask[, descriptors[, useProvidedKeypoints]]) #用于计算图片的关键点和描述符 -
柱面投影:在全景图的拼接中,为提高视觉可读性,对图片进行适当的柱面投影,使得拼接更平滑
def cylindrical_projection(img , f) : rows = img.shape[0] cols = img.shape[1] blank = np.zeros_like(img) center_x = int(cols / 2) center_y = int(rows / 2) for y in range(rows): for x in range(cols): theta = math.atan((x- center_x )/ f) point_x = int(f * math.tan( (x-center_x) / f) + center_x) point_y = int( (y-center_y) / math.cos(theta) + center_y) if point_x >= cols or point_x < 0 or point_y >= rows or point_y < 0: pass else: blank[y , x, :] = img[point_y , point_x ,:] return blank -
关键点匹配:利用已经提取好的关键点和特征向量进行匹配,为加快匹配速度,使用FLANN的单应性匹配
flann=cv2.FlannBasedMatcher(indexParams,searchParams) match=flann.knnMatch(descrip1,descrip2,k=2) #快速匹配器,返回值包括两张图的描述符距离、训练图(第二张)的描述符索引、查询的图(第一张)的描述符索引 M,mask=cv2.findHomography(srcPoints, dstPoints[, method[, ransacReprojThreshold[, mask]]]) #实现单应性匹配,返回的M是一个矩阵,即对关键点srcPoints做M变换能变到dstPoints的位置 -
透视变换:对第二张图片进行透视变换,透视旋转到与第一张图可以进行拼接的角度
warpImg=cv2.warpPerspective(src,np.linalg.inv(M),dsize[,dst[,flags[,borderMode[,borderValue]]]]) #对图片进行透视变换,变换视角。src是要变换的图片,np.linalg.inv(M)是单应性矩阵M的逆矩阵 -
加权处理:将第一张图叠在左边,对重叠区进行加权处理,重叠部分,离左边近,左边图的权重就高,右边亦然,两者相加,使得平滑过渡
3.1.3完整代码
import cv2
import numpy as np
import math
from matplotlib import pyplot as plt
from skimage.transform import resize
#定义最少匹配点数目
MIN = 10
img1 = cv2.imread('Desktop/1.png')
img2 = cv2.imread('Desktop/2.png')
#圆柱投影
#f为圆柱半径,每次匹配需要调节f
def cylindrical_projection(img , f) :
rows = img.shape[0]
cols = img.shape[1]
blank = np.zeros_like(img)
center_x = int(cols / 2)
center_y = int(rows / 2)
for y in range(rows):
for x in range(cols):
theta = math.atan((x- center_x )/ f)
point_x = int(f * math.tan( (x-center_x) / f) + center_x)
point_y = int( (y-center_y) / math.cos(theta) + center_y)
if point_x >= cols or point_x < 0 or point_y >= rows or point_y < 0:
pass
else:
blank[y , x, :] = img[point_y , point_x ,:]
return blank
#创建SURF对象
surf=cv2.xfeatures2d.SURF_create(100,nOctaves=4,extended=False,upright=False)
#柱面投影
img1 = cylindrical_projection(img1,1500)
img2 = cylindrical_projection(img2,1500)
#提取特征点、特征描述符
kp1,descrip1=surf.detectAndCompute(img1,None)
kp2,descrip2=surf.detectAndCompute(img2,None)
#FLANN快速匹配器
FLANN_INDEX_KDTREE = 0
indexParams = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
searchParams = dict(checks=50)
flann=cv2.FlannBasedMatcher(indexParams,searchParams)
match=flann.knnMatch(descrip1,descrip2,k=2)
#获取符合条件的匹配点
good=[]
for i,(m,n) in enumerate(match):
if(m.distance<0.75*n.distance):
good.append(m)
if len(good)>MIN:
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1,1,2)
ano_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1,1,2)
#实现单应性匹配,返回关键点srcPoints做M变换能变到dstPoints的位置
M,mask=cv2.findHomography(src_pts,ano_pts,cv2.RANSAC,5.0)
#对图片进行透视变换,变换视角。src是要变换的图片,np.linalg.inv(M)是单应性矩阵M的逆矩阵
warpImg = cv2.warpPerspective(img2, np.linalg.inv(M), (img1.shape[1]+img2.shape[1], img2.shape[0]))
rows,cols=img1.shape[:2]
#图像融合,进行加权处理
for col in range(0,cols):
if img1[:, col].any() and warpImg[:, col].any():#开始重叠的最左端
left = col
break
for col in range(cols-1, 0, -1):
if img1[:, col].any() and warpImg[:, col].any():#重叠的最右一列
right = col
break
res = np.zeros([rows, cols, 3], np.uint8)
for row in range(0, rows):
for col in range(0, cols):
if not img1[row, col].any():#如果没有原图,用旋转的填充
res[row, col] = warpImg[row, col]
elif not warpImg[row, col].any():
res[row, col] = img1[row, col]
else:
srcImgLen = float(abs(col - left))
testImgLen = float(abs(col - right))
alpha = srcImgLen / (srcImgLen + testImgLen)
res[row, col] = np.clip(img1[row, col] * (1-alpha) + warpImg[row, col] * alpha, 0, 255)
warpImg[0:img1.shape[0], 0:img1.shape[1]]=res
img4=cv2.cvtColor(warpImg,cv2.COLOR_BGR2RGB)
plt.imshow(img4,),plt.show()
cv2.imwrite("test12.png",warpImg)
else:
print("not enough matches!")
3.1.4 实验结果
3.1.5 实验结果分析
对只有水平位移的图片进行拼接时,无需使用柱面投影,拼接效果较佳。
实现全景图拼接时,因为不同的图片使用柱面投影的半径不同,导致在最后拼接时出现部分视觉上的一些不平滑,且因为图片分辨率及拼接算法的限制,导致部分区域出现重影及缺失。在以后的迭代版本可以进行优化
3.2 目标识别
3.2.1 思路
- 使用selective search网络对图片进行目标检测,记录所有预测结果,使用Resnet进行目标识别
- 对所有预测结果进行判断,如果符合预期,则记录左上角x,左上角y,宽和高
- 利用非极大抑制得到最精确的取景框
- 在原始图上绘制符合预期的待候选区域
3.2.2 实现方法
-
调用Resnet网络
ResNet网络是参考了VGG19网络,在其基础上进行了修改,并通过短路机制加入了残差单元,如图5所示。变化主要体现在ResNet直接使用stride=2的卷积做下采样,并且用global average pool层替换了全连接层。ResNet的一个重要设计原则是:当feature map大小降低一半时,feature map的数量增加一倍,这保持了网络层的复杂度。
model = ResNet50(weights='imagenet')#载入ResNet50网络模型,并使用在ImageNet ILSVRC比赛中已经训练好的权重 target_size = (224, 224)#ResNet50的输入大小固定为(224,224),其他大小会报错 top_n=1#只输出最高概率对应的一类 img = cv2.imread("1.jpg")#待预测图像(三通道图像) preds = predict(model, target_size, top_n, img)#预测结果 -
使用selective search网络对图片进行目标检测
在图像中寻找物体,可以依据多种特征,例如颜色、纹理、形状等。然而,这些特征并不能通用地用来寻找所有的物体,物体在图像中的尺度也大小不一。为了兼顾各种尺度与特征,selective search的做法是先寻找尺寸较小的区域,然后逐渐将特征相近的小尺度的区域合并为大尺度区域,从而得到内部特征一致的物体图像。
# 通过调节三个参数来实现目标的精准检测 # 选择性搜索 img_select, regions = selectivesearch.selective_search( img, scale=300, sigma=0.7, min_size=200) # 计算原始候选区域数量 temp = set() for i in range(img_select.shape[0]): for j in range(img_select.shape[1]): temp.add(img_select[i, j, 3]) -
使用非极大抑制:为避免同一个物体出现多个检测框,则对检测框进行排序。如果一个物体存在多个检测框,按照得分排序,取得分最高的检测框。接下来计算其他框与当前框的重合程度,如果程度大于阈值就删除。本次实验阈值取0,不会出现重叠的检测框
def NMS(data, thresh): # 计算四角位置 x1 = data[:, 0] w = data[:, 2] x2 = x1 + w - 1 y1 = data[:, 1] h = data[:, 3] y2 = y1 + h - 1 # 精确度 scores = data[:, 4] # 检测框的面积 areas = w * h order = scores.argsort()[::-1] # 结果对应的取景框集合 keep = [] while order.size > 0: index = order[0] keep.append(index) ix1 = np.maximum(x1[index], x1[order[1:]]) ix2 = np.minimum(x2[index], x2[order[1:]]) iy1 = np.maximum(y1[index], y1[order[1:]]) iy2 = np.minimum(y2[index], y2[order[1:]]) iw = np.maximum(0.0, ix2 - ix1 + 1) ih = np.maximum(0.0, iy2 - iy1 + 1) inter = iw * ih # 计算IoU ratio = inter / (areas[index] + areas[order[1:]] - inter) inds = np.where(ratio <= thresh)[0] # 保留IoU小于阈值的inds order = order[inds + 1] return keep -
通过selective search对图片进行目标检测后,使用Resnet网络进行目标识别,判断是否为预期目标,满足则计入输出数组。设置一个阈值,保留置信度排名在阈值内的目标
# 创建一个集合 记录每一个元素的左上角x,左上角y,宽,高,表示候选区域的边框Repository = set()# 载入ResNet50网络模型,并使用在ImageNet ILSVRC比赛中已经训练好的权重for r in regions: # 排除重复的候选区 if r['rect'] in Repository: continue # 根据具体图片的大小,调节区域大小 if r['size'] < 5000: continue # 排除扭曲严重的候选区域边框 x, y, w, h = r['rect'] # 调节宽高比或者高宽比进行候选框筛选 if w / h > 1.5 or h / w > 1.5: continue # 切割图像,用于输入到resnet img_cut = img[y:y + h, x:x + w] # 将切割后图像输入到resnet,并保留概率前num的预测结果,通过调整num来最大限度找到需要的目标 num = 15 pres = resnet.predict(model, target_shape, num, img_cut) for i in range(num): # 保存需要的预测结果 if pres[i][1] == 'book_jacket' : # 设置最小置信度,减小识别误差 if pres[i][2] < 0.03: continue Repository.add(r['rect'] + pres[i][1:]) -
在原始图像上绘制满足条件的候选区域边框
fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(6, 6))b, g, r = cv2.split(img)img_rgb = cv2.merge([r, g, b])for i in final: x, y, w, h = i[:4] text = i[4] + '\n' text += str(i[5]) print(x, y, w, h) rect = mpatches.Rectangle( (x, y), w, h, fill=False, edgecolor='red', linewidth=1) ax.add_patch(rect) ax.annotate(text, (x, y+10))
3.2.3 完整代码
import numpy as npimport cv2import matplotlib.pyplot as pltimport matplotlib.patches as mpatchesimport selectivesearchimport resnet_for_image_classify as resnetfrom keras.applications.resnet import ResNet50, preprocess_input, decode_predictions# 非极大值抑制函数def NMS(data, thresh): # 计算四角位置 x1 = data[:, 0] w = data[:, 2] x2 = x1 + w - 1 y1 = data[:, 1] h = data[:, 3] y2 = y1 + h - 1 # 精确度 scores = data[:, 4] # 检测框的面积 areas = w * h order = scores.argsort()[::-1] # 结果对应的取景框集合 keep = [] while order.size > 0: index = order[0] keep.append(index) ix1 = np.maximum(x1[index], x1[order[1:]]) ix2 = np.minimum(x2[index], x2[order[1:]]) iy1 = np.maximum(y1[index], y1[order[1:]]) iy2 = np.minimum(y2[index], y2[order[1:]]) iw = np.maximum(0.0, ix2 - ix1 + 1) ih = np.maximum(0.0, iy2 - iy1 + 1) inter = iw * ih # 计算IoU ratio = inter / (areas[index] + areas[order[1:]] - inter) inds = np.where(ratio <= thresh)[0] # 保留IoU小于阈值的inds order = order[inds + 1] return keep# 加载图片数据img = cv2.imread("easy123.png")# Resnet 固定图片大小target_shape = (224, 224)# 通过调节三个参数来实现目标的精准检测# 选择性搜索img_select, regions = selectivesearch.selective_search( img, scale=300, sigma=0.7, min_size=200)# 计算原始候选区域数量temp = set()for i in range(img_select.shape[0]): for j in range(img_select.shape[1]): temp.add(img_select[i, j, 3])# 创建一个集合 记录每一个元素的左上角x,左上角y,宽,高,表示候选区域的边框Repository = set()# 载入ResNet50网络模型,并使用在ImageNet ILSVRC比赛中已经训练好的权重model = ResNet50(weights='imagenet')for r in regions: # 排除重复的候选区 if r['rect'] in Repository: continue # 根据具体图片的大小,调节区域大小 if r['size'] < 5000: continue # 排除扭曲严重的候选区域边框 x, y, w, h = r['rect'] # 调节宽高比或者高宽比进行候选框筛选 if w / h > 1.5 or h / w > 1.5: continue # 切割图像,用于输入到resnet img_cut = img[y:y + h, x:x + w] # 将切割后图像输入到resnet,并保留概率前num的预测结果,通过调整num来最大限度找到需要的目标 num = 15 pres = resnet.predict(model, target_shape, num, img_cut) for i in range(num): # 保存需要的预测结果 if pres[i][1] == 'book_jacket' : # 设置最小置信度,减小识别误差 if pres[i][2] < 0.03: continue Repository.add(r['rect'] + pres[i][1:])# 利用非极大值抑制得到最精确的取景框arr = []for i in Repository: nw = [] nw[:4] = i[:4] nw.append(i[5]) arr.append(nw)data = np.array(arr)# 设置非极大抑制为0,禁止重叠框的出现keep = NMS(data, 0)# 利用非极大值抑制进行取景框的筛选arr = []final = []for i in Repository: nw = [] nw[:6] = i[:] arr.append(nw)for i in keep: final.append(arr[i])# 在原始图像上绘制候选区域边框fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(6, 6))b, g, r = cv2.split(img)img_rgb = cv2.merge([r, g, b])for i in final: x, y, w, h = i[:4] text = i[4] + '\n' text += str(i[5]) print(x, y, w, h) rect = mpatches.Rectangle( (x, y), w, h, fill=False, edgecolor='red', linewidth=1) ax.add_patch(rect) ax.annotate(text, (x, y+10))plt.show()
3.2.4 实验结果
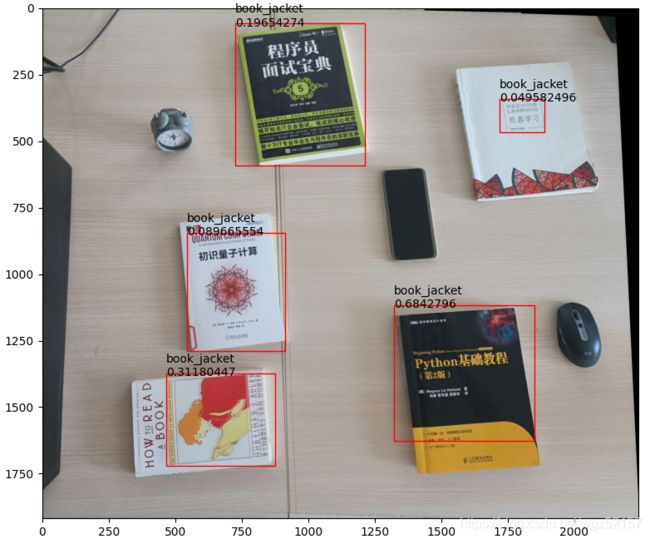

3.2.5 实验结果分析
简单示例只进行了水平拼接,且原图片分辨率较高,识别效果较好,至于右上角的识别框的大小问题应该通过调节参数可以解决。
困难实例为了加快拼接速度,使用了压缩后的图片,分辨率严重降低,导致视觉效果不好,但在目标检测的过程中效果较好,基本将所有需要的目标都完成了识别