Multiscale Vision Transformers 论文阅读
目录
- 一.了解MViT
- 二.介绍MViT
-
- 1.基本思想
- 2.优势
- 三.MViT模型
-
- 1.多头池化注意力(Multi Head Pooling Attention)
- 2.多尺度变换器网络(Multiscale Transformer Networks)
-
- 2.1 Vision Transformer (ViT)
- 2.2 Multiscale Vision Transformers (MViT)
- 四.视频识别实验
-
- 1.Kinetics-400
- 2.Kinetics-600
- 3.Kinetics-400的消融实验
- 五.小结
附:论文地址,代码地址
一.了解MViT
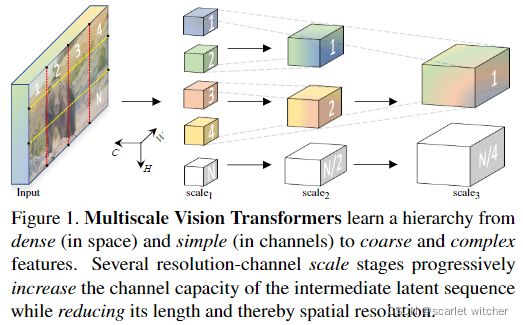
本文提出用于视频和图像识别的多尺度视觉变换器(Multiscale Vision Transformers),它将多尺度特征层次的基本思想与变换器模型相结合。
多尺度变换器具有多个通道和分辨率的缩放级,从输入的空间分辨率和较小的通道维度开始,分层扩展通道维度,同时降低空间分辨率。这将创建一个多尺度特征金字塔,前期的层以高空间分辨率操作,模拟简单的低级视觉信息,之后在空间粗糙但复杂的高维特征上创建更深的层。本文经过评估这一基本架构,发现其胜过大部分依赖外部预训练的模型(在计算和参数中比MViT多5-10倍)。
大致过程如下图所示
二.介绍MViT
1.基本思想
多尺度视觉变换器(MViT),是一种用于建模图像和视频等视觉数据的变换器体系结构。
由上面的图1所示,与在整个网络中保持恒定信道量和分辨率的传统变换器不同,MViT具有多个信道和分辨率缩放级。从输入的分辨率和较小的通道维度开始,阶段分层扩展通道容量,同时降低空间分辨率。有效地将transformer与多尺度特征层次结合起来。
2.优势
-
视觉信号的极度密集性。前期层信道容量较轻,可以在高空间分辨率下运行,模拟简单的低级视觉信息。反过来,深层可以关注复杂的高级特征。
-
多尺度模型充分利用时间信息。在自然视频上训练的ViT在具有混洗帧的视频上测试时,不会出现性能衰减,表明这些模型没有有效地使用时间信息,而是严重依赖于外观。相比之下,当在随机帧上测试MViT模型时,有显著的精度衰减,这表明十分依赖于时间信息。
-
本文的重点是视频识别,MViT使用数据集训练((Kinetics ,Charades , SSv2 and AVA )。MViT在没有任何外部预训练数据的情况下,相较于并发视频转换器有显著的性能提升。
-
与其他有外部预训练的模型相比(ViT的变体:VTN , TimeSformer ,ViViT ),达到相同的准确度具有更少的浮点计算和参数。
三.MViT模型
多尺度视觉变换器架构建立在阶段的概念之上。每一阶段由多个具有特定时空分辨率和通道尺寸的变换器块组成。多尺度变换器的主要思想是逐步扩展信道容量,同时汇集网络输入到输出的分辨率。
1.多头池化注意力(Multi Head Pooling Attention)
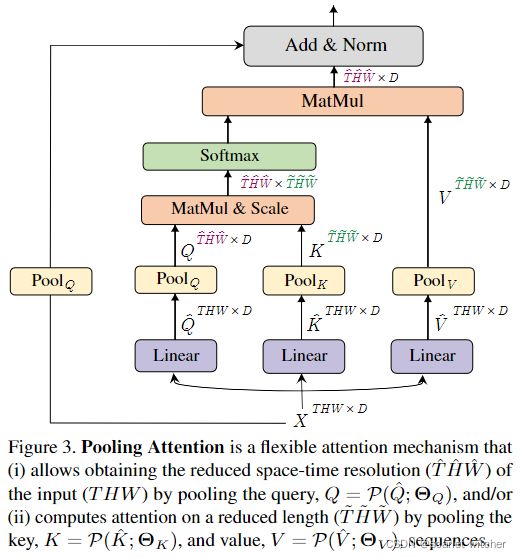
首先对MHPA作出解释,这是本文的核心,它使得多尺度变换器以逐渐变化的时空分辨率进行操作。与原始的多头注意力(MHA)不同,在原始的多头注意力中,通道维度和时空分辨率保持不变,MHPA将潜在张量序列合并,以减少参与输入的序列长度(分辨率)。如图3所示
具体来说,一个D维的输入X,序列长度为L, X ∈ R L ∗ D X\in\mathbb R^{L*D} X∈RL∗D, MHPA 将输入X投影到 Q ^ ∈ R L ∗ D \hat Q\in\mathbb R^{L*D} Q^∈RL∗D, K ^ ∈ R L ∗ D \hat K\in\mathbb R^{L*D} K^∈RL∗D, V ^ ∈ R L ∗ D \hat V\in\mathbb R^{L*D} V^∈RL∗D上

使用维数为D×D的权重WQ、WK、WV ,然后使用池操作符 P将获得的中间张量按序列长度进行合并,下一节介绍池操作。
Pooling Operator
在参与输入之前,中间张量 Q ^ \hat Q Q^, K ^ \hat K K^, V ^ \hat V V^参与运算符 P ( ⋅ ; Θ ) P(·;Θ) P(⋅;Θ),这是MHPA的基石,也是多尺度变换器架构的基础。运算符 P ( ⋅ ; Θ ) P(·;Θ) P(⋅;Θ)沿每个维度对输入张量执行池化计算。 Θ = ( k , s , p ) Θ =(k,s,p) Θ=(k,s,p),使用大小为 kT×kH×kW 的池核k、大小为 sT×sH×sW 的步长s和大小为pT×pH×pW 的填充p,来减少尺寸L=T×H×W的输入张量,经过下面的公式池化之后
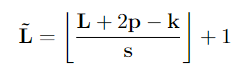
该公式是对每个维度进行计算,即将T,H,W分别进行计算得到 T ~ \widetilde T T , H ~ \widetilde H H , W ~ \widetilde W W ,将池化后的打平,就得到了 P ( Y ; Θ ) ∈ R L ~ ∗ D P(Y;Θ)\in\mathbb R^{\widetilde L*D} P(Y;Θ)∈RL ∗D
![]()
一般情况下,在池化操作中,采用重叠的核k和保形填充p,使得最后得到的 P ( Y ; Θ ) P(Y;Θ) P(Y;Θ)整体上缩减sT sH sW
Pooling Attention
P ( ⋅ ; Θ ) P(·;Θ) P(⋅;Θ) 分别地应用于所有中间张量 Q ^ \hat Q Q^, K ^ \hat K K^, V ^ \hat V V^,由此产生预注意向量 Q = P ( Q ^ ; Θ Q ) 、 K = P ( K ^ ; Θ K ) 和 V = P ( V ^ ; Θ V ) Q=P(\hat Q;Θ_Q)、K=P(\hat K;Θ_K)和V=P(\hat V;Θ_V) Q=P(Q^;ΘQ)、K=P(K^;ΘK)和V=P(V^;ΘV)。通过操作对Q,K,V进行计算
![]()
其中 D \sqrt D D 是按行对内积矩阵进行规范化。因此,随着 P ( ⋅ ; Θ ) P(·;Θ) P(⋅;Θ)中查询向量 Q 的缩减,最后的输出结果是输出序列缩减了sTQ sHQ sWQ 。并且我们从图3可以注意到,sk = sv 必须成立,因为他们缩减的幅度必须一致,否则不能进行计算。
总结,以上公式可以用下面的公式来详细表达
![]()
Multiple heads
假设有h个头部,计算可以并行化,其中每个头部在D维输入张量X的D/h的非重叠子集上执行池化注意力。
2.多尺度变换器网络(Multiscale Transformer Networks)
基于多头集中注意力(MHPA),本文创造了专门使用MHPA和MLP层进行视觉表征学习的多尺度变换器模型。在此之前,了解一下ViT模型
2.1 Vision Transformer (ViT)
- 首先将分辨率为 T × H × W 的输入视频,其中 T 为帧数、 H 为高度、 W 为宽度,分割成尺寸为1 × 16 × 16的非重叠块,然后在平坦图像块上逐点运用线性层,将其投影到潜在尺寸 D 中。就是1 × 16 × 16的核大小和步长的卷积,如表1中patch1阶段所示

- 位置嵌入 E ∈ R L ∗ D E\in\mathbb R^{L*D} E∈RL∗D 添加到长度为L且维数为D的投影序列的每个元素。
- 通过N个变换器块的顺序处理,产生的长度为L+1的序列,每个变换器块执行注意力(MHA)、多层感知机(MLP)和层规范化(LN)操作。通过以下公式计算:

此处产生长度为L+1的序列是因为spacetime resolution + class token - N个连续块之后的结果序列被层规范化,通过线性层来预测输出。此处需要注意,默认情况下,MLP的输入是4D。
2.2 Multiscale Vision Transformers (MViT)
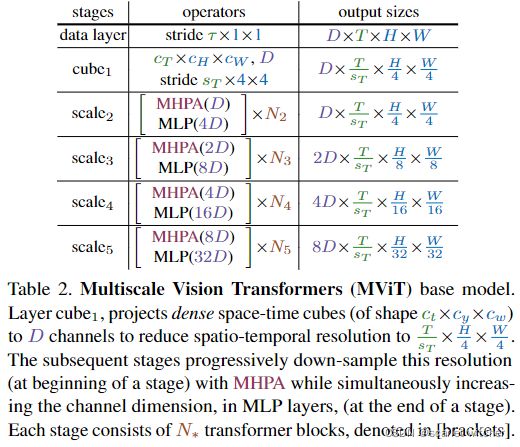
逐步增加信道维度,同时降低整个网络的时空分辨率(即序列长度)。MViT在早期层中具有精细的时空分辨率和低信道维度,而在后期层中,变为粗略的时空分辨率和高信道维度。MViT如表2所示。
Scale stages
尺度阶段定义为一组N个变换器块,在相同的尺度上跨信道和时空维度以相同的分辨率运行。在阶段转换时,信道维度上采样,而序列的长度下采样。
Channel expansion
当从一个阶段过渡到下一个阶段时,通过增加前一阶段最终MLP层的输出来扩展通道维数,增加的因素与该阶段引入的分辨率变化相关。举个例子来说,时空分辨率降低4倍,那么通道维数需要增大2倍。
Query pooling
池操作使得查询向量方面有更高的灵活性,从而可以改变输出序列的长度。将查询向量 P ( Q ; k ; p ; s ) P (Q; k; p; s) P(Q;k;p;s)与核函数 s ≡(sQT,sQH,sQW)结合起来,使序列减少了 sQT,sQH,sQW。这里有个点需要注意,一个阶段的开始降低分辨率,然后在整个阶段保持分辨率,所以只有每个阶段的第一个P在 sQ > 1,其他都是 sQ ≡(1,1,1)
Key-Value pooling
与查询池不同,更改键K和值V张量的序列长度不会更改输出序列长度(时空分辨率),所以对于所有的K和V都执行了池化。上面说过,最后为了能够执行计算,K和V池化后的各个维度必须一致,所以本文默认情况下,取 Θ K ≡ Θ V Θ_K ≡ Θ_V ΘK≡ΘV
Skip connections
由于通道尺寸和序列长度发生变化,对skip connection 进行pool 以适应其两端的尺寸不匹配。由图3可以看出,MHPA通过使用查询池操作符 Q = P ( Q ^ ; Θ Q ) Q=P(\hat Q;Θ_Q) Q=P(Q^;ΘQ)来处理这种不匹配。
四.视频识别实验
- 数据集:Kinetics-400 和 Kinetics-600,记录了验证集的top-1和top-5分类准确率(%)、单个空间中心裁剪clip的计算成本(单位为FLOPs)以及使用的clip数量。
- 训练:默认情况下,所有模型都是在 Kinetics 上从随机初始化(“从头开始”)进行训练,而不使用 ImageNet或其他预训练。从全视频中取样一个clip,输入到网络的是一个时间跨度为 τ τ τ 的 T T T 帧,表示为 T × τ T × τ T×τ
- 推理:
(1) 在时间上,从视频中均匀采样K个clip(例如,K=5),将较短的空间侧缩放到256像素,并进行224×224的中心裁剪
(2)与(1)在时间上相同,但进行3次224×224的裁剪以覆盖较长的空间轴,对所有个体预测的得分取平均值
1.Kinetics-400

表4将结果分为四部分,接下来依次对这四部分作简要介绍
第一部分是之前的方法,采用的是卷积网络所得到的结果。
第二部分是使用ViT。这种方法都依赖于ImageNet预先训练的基础模型。ViT-B-VTN从ImageNet-1K更改为ImageNet-21K,可将精度提高至78.6%。而ViViT有更为巨大的参数量,进一步提高精度。
第三部分显示了ViT基线。首先列出的ViT-B,是在ImageNet-21K上预先训练的,它达到79.3%,这一结果表明,简单地微调ImageNet-21K中现成的ViT-B模型可以提供一个良好的基线。
第四部分是MViT的结果。所有的模型都是从头开始训练的。轻量级MViT-S的为76.0%,MViT-B在相同设置下比ViT-B的精度提升9.9%,同时具有更少的FLOPs和参数量。将帧采样从16×4更改为32×3时,性能将提高到80.2%。
2.Kinetics-600

从头开始训练MViT,没有任何预训练。MViT通过5-clip,中心裁剪测试实现了83.4%的最先进水平,同时与依赖大规模ImageNet-21K预训练的ViT-L-ViViT相比,其FLOPs和参数量减少了56.0倍和8.4倍
3.Kinetics-400的消融实验
在Kinetics-400(K400)上进行消融实验,使用5-clip中心224×224作测试。展示了top-1精度以及空间大小为224×224的单个clip输入的计算复杂度(以GFLOPs为单位)。当使用固定数量(5个clip)时,推断计算成本成比例(用T× τ τ τ=16×4采样)。报告了批量大小为4的参数量和训练GPU的内存。默认情况下,所有MViT均为MViT-B,T× τ τ τ=16×4,MHSA中采用最大池化
Frame shuffling

可以从表9中看出,对于打乱的帧,MViT-B的精度下降严重,而ViT-B的精度几乎没有下降,可以得出ViT-B几乎没有用到时间信息,而MViT-B严重依赖时间信息。
Two scales in ViT

通过使用sQ执行池化来实现这一点,sQ ≡(1,2,2)。表10显示了结果,在ViT-B基线上增加单个分辨率缩放可将精确度提高+1.5%,同时将FLOPs和内存成本分别降低38%和41%。合并键值张量可以减少计算和内存开销,同时略微提高准确性。
Separate space & time embeddings in MViT

Input Sampling Rate
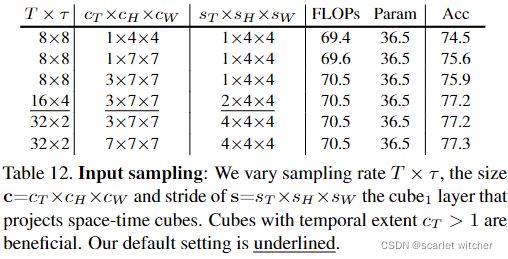
cT=1的性能比cT>1的性能差。此外,采样两倍的帧(T=16)和两倍的sT(sT = 2),可以保持成本(FLOPs和参数量)不变,但性能提高。此外,采样重叠的cube(s
Stage distribution
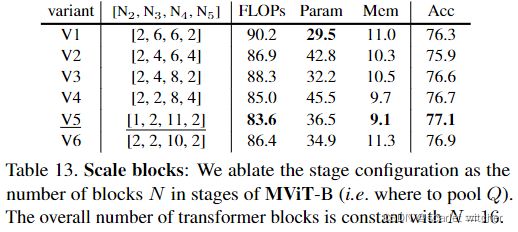
在变换器块数固定,N=16时,通过实验发现在scale4阶段放置更多的块数,有利于准确度的提高。
Key-Value pooling
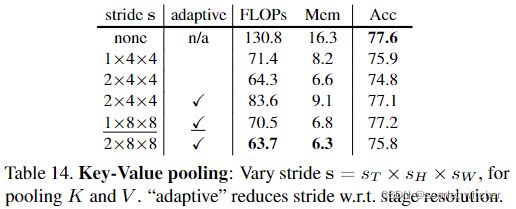
比较了使用无K、V池,无自适应池(关于stage resolution的stride)的基线和所有阶段固定步幅为2×4×4:这将准确性从77.6%降低到74.8%,在scale1阶段使用1×8×8、scale2阶段使用1×4×4、scale3阶段使用1×2×2的自适应步幅,可获得77.2%的最佳精度。
Pooling function
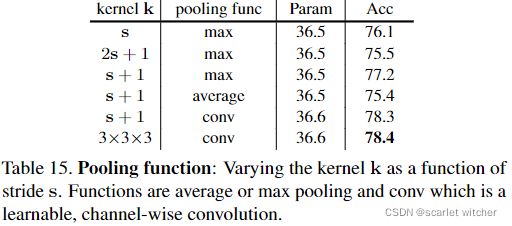
从表15得出,比较了不同的池化函数和核大小对于准确度的影响,可以看出卷积池化(本质就是卷积层)得到的准确率最高。并且使用max池化时,过大于stride的核不利于准确度的进一步提高。
Speed-Accuracy tradeoff

MViT-S和MViT-B模型不仅比ViT-B模型和卷积模型更准确,而且速度更快。在MViT中,由于卷积更新更多的参数,所以准确率高,但速度较max-pool慢。可以看出速度和准确率不可兼得。
五.小结
- 多尺度视觉变换器,将多尺度特征层次的概念与transformer结合起来
- MViT 层次化地扩展了通道维数,同时减少了时空分辨率。