【衬套】橡胶元件的动态性能
编辑:CrazyRabbit
日期:2022年6月30日
一、前言
底盘上大量应用了橡胶类元件,如:衬套、轮胎、隔振块等。
橡胶衬套是由分子之间物理键或化学键构成的高分子聚合物,受到外部载荷时,橡胶材料分子之间易于产生相对运动,分子链产生拉伸和扭转变形,当载荷消失后,材料分子即恢复到原来的位置,对外做功,称之为橡胶的弹性(Elastic)特性;部分材料分子并未回到原位,而是产生了永久变形,称这种特性为橡胶的黏性(Viscous)特性,这种特性对NVH起着关键性作用。
由黏性特性带来的橡胶元件的动态性能有:动刚度、滞后角等。
二、K-V模型
为了更好的理解橡胶元件的动态特性,建立最简单的橡胶模型如下图:
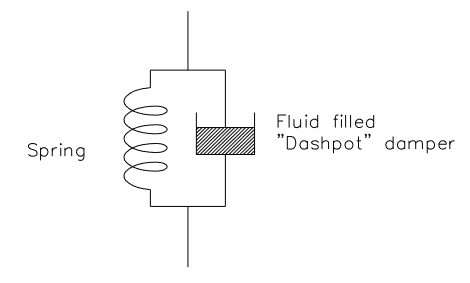
即用一个弹簧Spring和一个阻尼器Damper的并联来模拟橡胶元件的力学特性,该模型称为K-V模型。
2.1 弹性刚度(Elastic Stiffness)
对于弹簧而言,对弹簧Spring施加一个正弦波的力F,根据胡克定律,得到的位移与力F同相位,如下图所示:
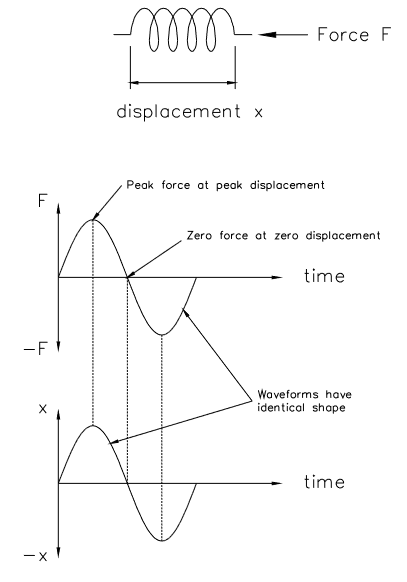
而力F与位移x的比值就是所谓的弹性刚度(Elastic Stiffness)。
2.2 黏性刚度(Viscous Stiffness)
而黏性效应有很大不同:对阻尼器Damper施加一个正弦波的力,会发现位移波形滞后力的波形,且滞后角为90°,如下图所示:

即力与速度成正比。
而对于橡胶元件,即存在弹簧Spring效应,又存在阻尼器Damper效应,得到的最终效果是位移滞后力的相位,且滞后角小于90°,如下图:
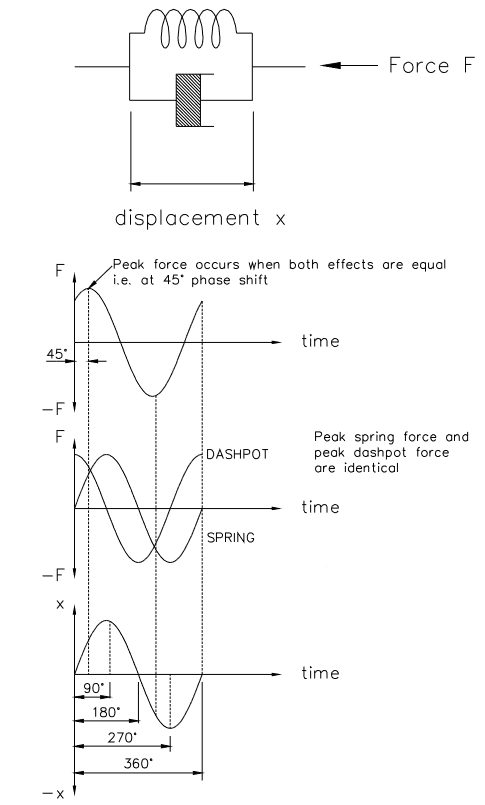
当黏性效应较弱,弹性效应呈主导时,位移存在较小的相位滞后;反之则相位滞后较大。
对于上述的描述,总结如下:
- Elastic Stiffness:弹性刚度,类似于静刚度
- Viscous Stiffness:黏性刚度,又称为损失刚度(Loss Stiffness),表征阻尼特性
2.3 动刚度和滞后角
上述引入的Elastic Stiffness和Viscous Stiffness只是为了方便理解橡胶的力学机理,实际工程中常用的工程参数是动刚度(Dynamic Stiffness)和滞后角(Phase Angle)。
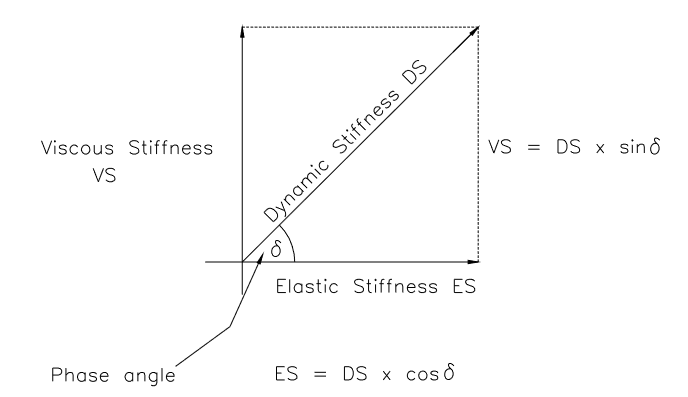
上述四种参数之间的关系如由上面的矢量图表达,动刚度、弹性刚度、黏性刚度满足矢量关系,其实动刚度更科学的定义应该为“复刚度(Complex Stiffness)”,取得是复数的模。
滞后角(又称为阻尼角,损失角) δ \delta δ的正切值为VS/ES,可通过反正切函数求得。
以下术语为相同含义:
动刚度(Dynamic Stiffness)=复刚度(Complex Stiffness)=黏弹性刚度(Viscoelastic Stiffness)
黏性刚度(Viscous Stiffness)=损失刚度(Loss Stiffness)=阻尼刚度(Damping Stiffness)
弹性刚度(Elastic Stiffness)=弹簧刚度(Spring Stiffness)=储能刚度(Storage Stiffness)=静刚度(Static Stiffness)
滞后角(Phase Angle)=阻尼角(Damping Angle)=损失角(Loss Angle)
2.4 测试
对于动刚度和滞后角的测试,可以参考下图:
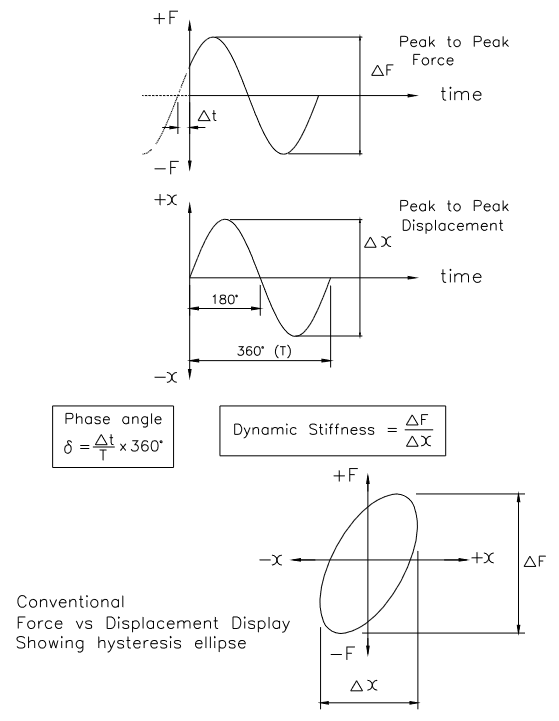
在力-位移的滞回曲线中,截取位移的峰峰值 Δ x \Delta x Δx和力的峰峰值 Δ F \Delta F ΔF,那么动刚度 D S = Δ F / Δ x DS=\Delta F/ \Delta x DS=ΔF/Δx;滞后角可根据滞后时间 Δ t \Delta t Δt获得: δ = Δ t / T × 360 \delta = \Delta t/T \times 360 δ=Δt/T×360
2.5 能量耗散
根据力-位移的滞回曲线,可以计算出每个周期损失的能量值:
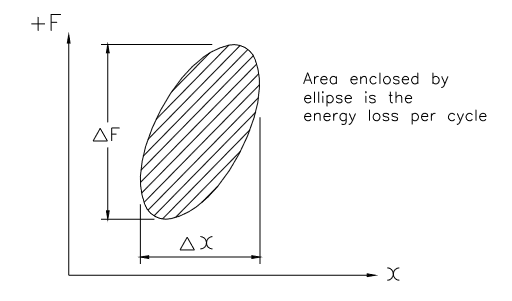
E = π 4 ⋅ Δ F ⋅ Δ x ⋅ sin δ E=\frac{\pi}{4} \cdot \Delta F \cdot \Delta x \cdot \sin \delta E=4π⋅ΔF⋅Δx⋅sinδ
有时也可用积分的办法,计算出损失的能量值,反推出滞后角(阻尼角) δ \delta δ。
三、模型的数学解析
从能量的角度看,动刚度是橡胶弹性体在外界激励作用下吸收的总能量,在橡胶变形过程中存储的能量体现为储能刚度,并且在移除外力后可使橡胶恢复;在橡胶变形过程中因内部摩擦所消散掉的能量体现为损失刚度。
对上述模型及过程做数学推导。设外界激励为 F ( t ) = f sin ( ω 0 t + ϕ ) F(t)=f \sin(\omega_0 t+\phi) F(t)=fsin(ω0t+ϕ),悬置的位移响应为 x ( t ) x(t) x(t),那么单自由度强迫振动的微分方程为:
C x ˙ ( t ) + K x ( t ) = F ( t ) C\dot{x}(t)+Kx(t)=F(t) Cx˙(t)+Kx(t)=F(t)
对上式做拉普拉斯变换,得:
C s X ( s ) + K X ( s ) = F ( s ) CsX(s)+KX(s)=F(s) CsX(s)+KX(s)=F(s)
即:
C s + K = F ( s ) X ( s ) Cs+K=\frac{F(s)}{X(s)} Cs+K=X(s)F(s)
令 s = j ω s=j\omega s=jω,假设橡胶弹性体的动刚度为 K ∗ ( ω 0 ) K^*(\omega_0) K∗(ω0),则:
K ∗ ( ω 0 ) = F ( j ω 0 ) X ( j ω 0 ) = K + C j ω 0 = K 1 + j K 2 K^*(\omega_0)=\frac{F(j\omega_0)}{X(j\omega_0)}=K+Cj\omega_0=K_1+jK_2 K∗(ω0)=X(jω0)F(jω0)=K+Cjω0=K1+jK2
那么,上式的K1是储能刚度,是动刚度的实部;jK2是损失刚度,是动刚度的虚部。
动刚度的幅值为: K ∗ = K 1 2 + K 2 2 K^*=\sqrt{K^2_1+K^2_2} K∗=K12+K22,滞后角为 Φ = arctan K 1 K 2 \Phi=\arctan\frac{K_1}{K_2} Φ=arctanK2K1。
以上的推导和第二节中的测试方法是基于K-V模型的,只是为了方便大家理解橡胶的特性。
实际橡胶件远比K-V模型要复杂。所以,更科学的测试方法是分别测量力和振动位移的波形,并做傅里叶变换求得传递函数,再求出相位滞后角。
四、底盘橡胶元件
从橡胶的动态性能和底盘NVH的角度,底盘橡胶元件主要有两大类:纯橡胶衬套(悬置)和液压衬套(悬置)。需要了解的知识点有:
- 对于普通的橡胶衬套,一般阻尼角最大只能做到12°~18°,几乎不可能超过20°。
- 液压衬套通过在衬套中设计复杂的液室和流道,能够设计出在关注频率段出现大阻尼角的动态特性,如下图:

- 液压衬套存在的缺点是耐久性不如纯橡胶衬套,容易产生漏油的失效模式。
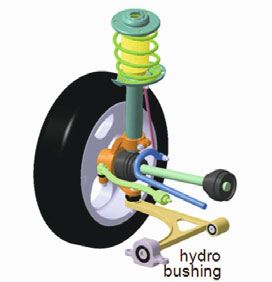
- 液压衬套应用最广泛的是动力总成悬置,其余涉及到平顺性的底盘部位也会用到,如麦弗逊式前悬架的下控制臂后衬套:
- 橡胶/悬置的动刚度除了与频率相关(一般频率越高,动刚度越大),也与振幅相关,一般测试振幅越小,动刚度越大。所以图纸中的动刚度测试条件要给定频率和振幅,甚至要给定预载。
- 对于动态特性的测试条件,根据衬套/悬置的实际使用工况决定。
五、其他模型
由于橡胶力学性能的复杂性,除了最简单的K-V模型,还衍生更多更准确、更复杂的模型,如下图:
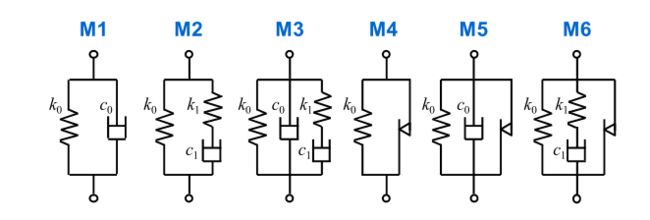
以上模型,M1M3用了更复杂的弹簧、阻尼的串并联组合;M4M6引入了摩擦的因素。更详细的对比,可参考论文《Modelling of rubber components using estimated parameters》。
六、Adams仿真
Adams中,橡胶元件都用Bushing元素模拟。通常在操稳分析中,只需用简单的衬套属性文件,给定六向刚度即可。但如果要做精确的平顺性分析,衬套必须用更精确的,至少是能体现动态特性的模型文件替代。

如上图所示,Adams提供了多种其他衬套模型,Hydro_bushing代表液压模型,Frequency_bushing是频率相关模型,General_bushing是通用模型。
最常用的是Hydro_bushing模型,而General_bushing是最复杂的。Adams也自带这些模型的辨识工具,可以根据实际测量数据,辨识对应模型的参数,导出属性文件。具体可参考帮助文档。
参考文献
本文参考了以下文献:
[1] R.C.Frampton. The Dynamic Testing of Elastomers
[2] 陈毅敏.橡胶动态性能测试的基本原理以及特点. 2016
[3] Understanding and Using Dynamic Stiffness – A Tutorial
[4] 丁超. 橡胶衬套的静、动态特性分析[D]. 华中科技大学 2015年
[5] O.Polach Modelling of rubber components using estimated parameters