(02)Cartographer源码无死角解析-(29) LocalTrajectoryBuilder2D::AddRangeData()→多雷达数据时间同步
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下:
(02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885
文 末 正 下 方 中 心 提 供 了 本 人 联 系 方 式 , 点 击 本 人 照 片 即 可 显 示 W X → 官 方 认 证 {\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证} 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言
再上一篇博客中对 src/cartographer/cartographer/mapping/internal/global_trajectory_builder.cc 进行了一个比较粗的讲解,大概的分析了其中的成员函数与成员变量。了解到 GlobalTrajectoryBuilder 主要的功能是依照条件,把数据转发到前后端。
但是有一个重要的函数,那就是 GlobalTrajectoryBuilder::AddSensorData(),该函数并不是简单的把数据发送到前后端,而是直接进行好些复杂的处理,先是进行扫描匹配, 然后将扫描匹配的结果当做节点插入到后端的位姿图中。虽然这里是一句话就描述完了,但是实际的操纵是十分复杂的。
在进入细节分析之前,我们先来看看 LocalTrajectoryBuilder2D 这个类,其头文件路径为 src/cartographer/cartographer/mapping/internal/2d/local_trajectory_builder_2d.h。复杂的先不说,了解其中的几个成员变量,如下:
ActiveSubmaps2D active_submaps_; //活跃的子图,子图完成了会删除一个,然后再新建一个。
MotionFilter motion_filter_; //对运动进行过滤,如果运动距离或事件太短,则不进行处理
scan_matching::RealTimeCorrelativeScanMatcher2D //实时的2D扫描匹配器
real_time_correlative_scan_matcher_;
scan_matching::CeresScanMatcher2D ceres_scan_matcher_; //ceres的扫面匹配器
std::unique_ptr<PoseExtrapolator> extrapolator_; //位姿估计器
RangeDataCollator range_data_collator_; //对雷达数据进行时间同步的类
剩下的结构体,成员函数等,后面为大家做详细的分析。
疑 问 : \color{red}疑问: 疑问: 该篇博客主要讲解点云数据的同步。大家可能存在疑问了,为什么要还要同步。之前在接口函数 CollatedTrajectoryBuilder::AddSensorData() 中,会把数据加入到 Collator::queue_ 这个阻塞队列中,然后按时间分发数据吗?
回 答 : \color{red}回答: 回答: Collator 最终调用 OrderedMultiQueue::Dispatch() 按时间排序分发数据,但是排序是针对单个话题(传感器)数据进行排序。现在假设有多个相同类型的传感器,这里以两个雷达为例,在一段时间内,其分别获取如下点云数据(按时间排序):
--------→ 时间戳
雷达一: 1 2 3 4 5 6 7 9 10 11 12 13 14 15 ......1000 //假设共1000点云
雷达二: 1 2 3 4 5 6 7 9 10 11 12 13 14 15 ......1000 //假设共1000点云
可以看到,他们的点云数据,存在重叠部分,又因为最终送入到前端的数据,都是基于 tracking_frame = “imu_link” 坐标系的,所以他们重叠部分的数据可以融合,也应该融合在一起进行处理。融合之后数据排列如下:
1 2 3 1 4 2 5 3 6 4 7 5 9 6 10 7 11 ...... 1000 ...... 1000 //共2000点云
二、LocalTrajectoryBuilder2D 构造函数
该构造函数位于 src/cartographer/cartographer/mapping/internal/2d/local_trajectory_builder_2d.cc 中实现。
/**
* @brief 构造函数
*
* @param[in] options //2d轨迹前端相关的配置,主要来自于 src/cartographer/configuration_files/trajectory_builder_2d.lua
* @param[in] expected_range_sensor_ids 所有range类型的话题(应该是距离传感器类型)
*/
LocalTrajectoryBuilder2D::LocalTrajectoryBuilder2D(
const proto::LocalTrajectoryBuilderOptions2D& options,
const std::vector<std::string>& expected_range_sensor_ids)
: options_(options),//2d轨迹前端的所有配置
//根据子图的相关配置,构建ActiveSubmaps2D对象
active_submaps_(options.submaps_options()),
//根据运动过滤的配置,构建 MotionFilter 对象
motion_filter_(options_.motion_filter_options()),
//根据real_time_correlative_scan_matcher配置参数,构建
//scan_matching::RealTimeCorrelativeScanMatcher2D 相关性扫描匹配类对象
real_time_correlative_scan_matcher_(
options_.real_time_correlative_scan_matcher_options()),
//根据ceres_scan_matcher参数,构建scan_matching::CeresScanMatcher2D对象
ceres_scan_matcher_(options_.ceres_scan_matcher_options()),
//根据订阅的话题,构建RangeDataCollator对象,用于对雷达数据进行时间同步的类
range_data_collator_(expected_range_sensor_ids) {}
其上的配置参数与选项都来自于 src/cartographer/configuration_files/trajectory_builder_2d.lua 文件。
三、RangeDataCollator.h 头文件
现在回过头来看看 GlobalTrajectoryBuilder::AddSensorData() 函数,可见如下代码:
// 通过前端进行扫描匹配, 然后返回匹配后的结果
std::unique_ptr<typename LocalTrajectoryBuilder::MatchingResult>matching_result =
local_trajectory_builder_->AddRangeData(sensor_id, timed_point_cloud_data);
其实际调用的就是 LocalTrajectoryBuilder2D::AddRangeData() 函数。其主要的功能是处理点云数据, 进行扫描匹配, 将点云写成地图。local_trajectory_builder_->AddRangeData() 函数的实现就比较复杂了,其中包含的东西太多了,不过没有关系,一步一步对齐进行分析即可。先来看其中的第一部分:
// Step: 1 进行多个雷达点云数据的时间同步, 点云的坐标是相对于tracking_frame的
auto synchronized_data =
range_data_collator_.AddRangeData(sensor_id, unsynchronized_data);
if (synchronized_data.ranges.empty()) {
LOG(INFO) << "Range data collator filling buffer.";
return nullptr;
}
range_data_collator_ 是在 LocalTrajectoryBuilder2D 构造函数,初始化列表中创建,range_data_collator_ 为 RangeDataCollator 的实例对象。先来看看其头文件,可以看到构造函数如下:
explicit RangeDataCollator(
const std::vector<std::string>& expected_range_sensor_ids)
: expected_sensor_ids_(expected_range_sensor_ids.begin(),
expected_range_sensor_ids.end()) {}
explicit 声明表示禁止该构造函数的隐式转换。注意看,传入的 expected_range_sensor_ids 是一个 string 类型的容器,但是经过初始化列表时候,变成 const std::set
public:
// If timed_point_cloud_data has incomplete intensity data, we will fill the
// missing intensities with kDefaultIntensityValue.
sensor::TimedPointCloudOriginData AddRangeData(
const std::string& sensor_id,
sensor::TimedPointCloudData timed_point_cloud_data);
private:
sensor::TimedPointCloudOriginData CropAndMerge();
剩下一些成员变量的介绍如下:
const std::set<std::string> expected_sensor_ids_; //存储不同的 topic name,无重复
// Store at most one message for each sensor.
std::map<std::string, sensor::TimedPointCloudData> id_to_pending_data_; // 待处理的数据
common::Time current_start_ = common::Time::min(); //开始时间
common::Time current_end_ = common::Time::min(); //结束时间
constexpr static float kDefaultIntensityValue = 0.f; //默认点云强度值
其上的 constexpr 表示该静态成员变量必须再类中初始化,下面就来重点分析函数 RangeDataCollator::AddRangeData()。
四、RangeDataCollator::AddRangeData() 逻辑i分析
该函数的作用是对多个雷达的数据进行时间的同步,主要步骤如下:
( 1 ) : \color{blue}(1): (1): 该函数接收两个参数,第一个参数 sensor_id 表示话题名字,第二个参数 timed_point_cloud_data 表示带时间的点云数据 。这里需要注意到点云数据没有使用引用的方式传递,前面都是以引用的方式进行传递的,所以这里进行了第一次点云数据的拷贝。
( 2 ) : \color{blue}(2): (2):传递到该函数的点云数据,也就是 timed_point_cloud_data 其是不包含强度信息了。那么是从什么时候起,没有强度信息的呢?在 SensorBridge::HandleLaserScan() 中,其会对点云数据进行分段,后续处理的数据都是分段之后的数据(如果num_subdivisions_per_laser_scan=1,则把所有数据看成一段)。但是在分段时,执行了如下代码:
carto::sensor::TimedPointCloud subdivision(
points.points.begin() + start_index, points.points.begin() + end_index);
可以看到,其构建分段数据 subdivision 的时候,并没有传入 points.intensities 强度信息,只传入的 points.points,其包含了点云数据与强度,但是没有没有强度信息。所以在这个位置,就丢失了点云强度信息。
( 3 ) : \color{blue}(3): (3): 所以在 RangeDataCollator::AddRangeData() 函数中,其 timed_point_cloud_data.intensities 变量是空的。所以执行了如下代码:
timed_point_cloud_data.intensities.resize(timed_point_cloud_data.ranges.size(), kDefaultIntensityValue);
把点云数据的强度全部设置为0
( 4 ) : \color{blue}(4): (4): 通过 id_to_pending_data_ 变量判断一下相同话题的数据是否存在没有处理完的点云数据,如果有,则优先对之前的点云数据进行处理。其通过调用 RangeDataCollator::CropAndMerge() 函数进行处理,然后把当前的点云数据 timed_point_cloud_data 存储在 id_to_pending_data_ 变量中,然后返回。还需要注意变量:current_start_(上一次时间同步的结束时间) 与 current_end_(本次时间同步的开始时间),其中 current_end_ 为本次时间同步的结束时间为这帧点云数据的结束时间,即为 TimedPointCloudData::time 参数。
( 5 ) : \color{blue}(5): (5): 如果该话题之前没有数据保存在 id_to_pending_data_ 之中,则等待range数据的话题都到来之后再进行处理。同样将 current_start_ 设置为上一次同步结束的时间,然后进行循环查找,找到 所有传感器数据中最早的时间戳(点云最后一个点的时间),然后赋值给 current_end_,最后调用 CropAndMerge() 函数处理当前点云数据后返回。
总 结 : \color{red}总结: 总结: RangeDataCollator::AddRangeData() 函数,主要就是获得一段点云的起始时间current_start_与结束时间 current_end_,然后调用 RangeDataCollator::CropAndMerge() 函数进行处理。
五、RangeDataCollator::AddRangeData() 代码注释
/**
* @brief 多个雷达数据的时间同步
*
* @param[in] sensor_id 雷达数据的话题
* @param[in] timed_point_cloud_data 雷达数据
* @return sensor::TimedPointCloudOriginData 根据时间处理之后的数据
*/
sensor::TimedPointCloudOriginData RangeDataCollator::AddRangeData(
const std::string& sensor_id,
sensor::TimedPointCloudData timed_point_cloud_data) { // 第一次拷贝
CHECK_NE(expected_sensor_ids_.count(sensor_id), 0);
// 从sensor_bridge传过来的数据的intensities为空
timed_point_cloud_data.intensities.resize(
timed_point_cloud_data.ranges.size(), kDefaultIntensityValue);
// TODO(gaschler): These two cases can probably be one.
// 如果同话题的点云, 还有没处理的, 就先处同步没处理的点云, 将当前点云保存
if (id_to_pending_data_.count(sensor_id) != 0) {
// current_end_为上一次时间同步的结束时间
// current_start_为本次时间同步的开始时间
current_start_ = current_end_;
// When we have two messages of the same sensor, move forward the older of
// the two (do not send out current).
// 本次时间同步的结束时间为这帧点云数据的结束时间
current_end_ = id_to_pending_data_.at(sensor_id).time;
auto result = CropAndMerge();
// 保存当前点云
id_to_pending_data_.emplace(sensor_id, std::move(timed_point_cloud_data));
return result;
}
// 先将当前点云添加到 等待时间同步的map中
id_to_pending_data_.emplace(sensor_id, std::move(timed_point_cloud_data));
// 等到range数据的话题都到来之后再进行处理
if (expected_sensor_ids_.size() != id_to_pending_data_.size()) {
return {};
}
current_start_ = current_end_;
// We have messages from all sensors, move forward to oldest.
common::Time oldest_timestamp = common::Time::max();
// 找到所有传感器数据中最早的时间戳(点云最后一个点的时间)
for (const auto& pair : id_to_pending_data_) {
oldest_timestamp = std::min(oldest_timestamp, pair.second.time);
}
// current_end_是本次时间同步的结束时间
// 是待时间同步map中的 所有点云中最早的时间戳
current_end_ = oldest_timestamp;
return CropAndMerge();
}
注 意 : \color{red}注意: 注意: 虽然 current_start_,会被赋值为上一次结束的时间
六、RangeDataCollator::CropAndMerge() 逻辑讲解
可以看到 RangeDataCollator::AddRangeData() 的核心是 CropAndMerge() 函数,其会直接对点云进行同步处理。为了方便理解,先先来看该函数的最后一段代码:
// 对各传感器的点云 按照每个点的时间从小到大进行排序
std::sort(result.ranges.begin(), result.ranges.end(),
[](const sensor::TimedPointCloudOriginData::RangeMeasurement& a,
const sensor::TimedPointCloudOriginData::RangeMeasurement& b) {
return a.point_time.time < b.point_time.time;
});
代码比较简单,就是说有的点云数据,都按照从小到大的方式进行排序。其复杂的的是 result.ranges 应该如何构建。那么下面我们就来看看。
( 01 ) : \color{blue}(01): (01): 首先创建一个 sensor::TimedPointCloudOriginData 结构体 result,结构体的定义后面再进行总结。
( 02 ) : \color{blue}(02): (02): 启动第一层遍历,也就是对话题的遍历,获得当前遍历话题点云数据的如下信息:
//雷达数据的总体信息,含点云最后一个点时间
sensor::TimedPointCloudData& data = it->second;
const sensor::TimedPointCloud& ranges = it->second.ranges;
const std::vector<float>& intensities = it->second.intensities;
其上的 sensor::TimedPointCloudData,不知道大家是否又印象,之前讲解过的 SensorBridge::HandleRangefinder() 函数,其发送的数据类型就是该类型,代码如下:
// 以 tracking 到 sensor_frame 的坐标变换为TimedPointCloudData 的 origin
// 将点云的坐标转成 tracking 坐标系下的坐标, 再传入trajectory_builder_
if (sensor_to_tracking != nullptr) {
trajectory_builder_->AddSensorData(
sensor_id, carto::sensor::TimedPointCloudData{
time,
sensor_to_tracking->translation().cast<float>(),
// 将点云从雷达坐标系下转到tracking_frame坐标系系下
carto::sensor::TransformTimedPointCloud(
ranges, sensor_to_tracking->cast<float>())} ); // 强度始终为空
}
再结合 TimedPointCloudData 的定义:
// 时间同步前的点云
struct TimedPointCloudData {
common::Time time; // 点云最后一个点的时间
Eigen::Vector3f origin; // 雷达传感器坐标系到tracking_frame = "imu_link" 坐标系的平移
TimedPointCloud ranges; // 数据点的集合, 每个数据点包含xyz与time, time是负的
// 'intensities' has to be same size as 'ranges', or empty.
std::vector<float> intensities; // 空的
};
因为函数回调 SensorBridge::HandleRangefinder() 中,构建 TimedPointCloudData 结构体实例时只对 common::Time time、Eigen::Vector3f origin、TimedPointCloud ranges 进行初始化,所以 std::vector
( 03 ) : \color{blue}(03): (03): 通过前面函数 RangeDataCollator::AddRangeData() 的运行,current_start_ 与 current_end_ 已经被赋值。这里需要注意一个点 TimedPointCloudData::time 表示一帧最后点云时间戳,其为正值,但是 TimedPointCloudData::points::time 是相对于最后点云的时间,通常都负值,当然,如果一帧点云数据几乎同时出来,就是所有点云距离最后一个点云生产的时间间隔太近了,那么就会为 0。
( 04 ) : \color{blue}(04): (04): 对所有点云进行遍历,每个点云的时间戳为 TimedPointCloudData::time 再加上其相对于该时间戳的时间,也就是 TimedPointCloudData::points::time,得到该点云的时间戳。找到点云中 最后一个时间戳小于current_start_的点迭代器 overlap_begin。同理找到点云中 最后一个时间戳小于等于current_end_的的点迭代器 overlap_end。
( 05 ) : \color{blue}(05): (05): 如果 ranges.begin() < overlap_begin 说明来自同一雷达的点云数据有重叠(点云数据时间戳不规范),同时 warned_for_dropped_points 又设置为 false 则会进行警告打印,类似如下:
"Dropped 5 earlier points."; //告知丢失了多少个点云数据,
该 warned_for_dropped_points 为一个标志位,每执行一次 CropAndMerge() 只打印一次log
( 06 ) : \color{blue}(06): (06): 如果 overlap_begin < overlap_end 成立,说明有点云数据需要进行同步处理。首先获得雷达传感器原点再坐标系tracking_frame = “imu_link” 平移位置,也就是 data.origin,存储在 result.origins 之中,总得来说,result.origins 的就是话题数据对应的origin,并且同时获得了其在 result.origins 中的索引 origin_index,time_correction 记录点云数据与集合时间戳的误差。
( 07 ) : \color{blue}(07): (07): 让 intensities 的迭代器 intensities_overlap_it 也指向 与 overlap_begin 相同的位置,也就是说此时 intensities_overlap_it 与 overlap_begin 已经一一对应。为 result.ranges 预留空间,会将之前的数据拷贝到新的内存中。
( 08 ) : \color{blue}(08): (08): 进入循环迭代,从 overlap_begin 开始到 overlap_end结束,每次迭代 overlap_it 与 intensities_overlap_it 都会指向下一次。首先其会构建一个 point,其类型为 sensor::TimedPointCloudOriginData::RangeMeasurement。注意 TimedPointCloudData::ranges 就是存储该类实例的容器。TimedPointCloudOriginData 与 RangeMeasurement 的定义如下:
// 时间同步后的点云
struct TimedPointCloudOriginData {
struct RangeMeasurement {
TimedRangefinderPoint point_time; // 带时间戳的单个数据点的坐标 xyz
float intensity; // 强度值
size_t origin_index; // 属于第几个origins的点
};
common::Time time; // 点云的时间
std::vector<Eigen::Vector3f> origins; // 所有雷达传感器相对于tracking_frame坐标系的位置
std::vector<RangeMeasurement> ranges; // 数据点的集合
};
构建的point先对其做一个时间的矫正,针对每个点时间戳进行修正, 让最后一个点的时间为0。然后添加到 result.ranges 之中。
( 09 ) : \color{blue}(09): (09): ①如果遍历完所有需要处理的点云之后 overlap_end == ranges.end(),说明点云每个点都用了, 则可将这个数据 data 从 id_to_pending_data_ 进行删除。②如果一个点都没用, 就先放在id_to_pending_data_中, 看下一个数据。
( 10 ) : \color{blue}(10): (10): 如果用了一部分,将用了的点删除, 这里使用的方式是直接对 data 进行赋值替换成没有处理的点云,先当于把用了的从 id_to_pending_data_ 中删除了。最后就是对 result 点云数据进行一个时间的排序。
如 果 没 有 看 得 很 明 白 , 没 有 关 系 , 继 续 往 下 , 后 面 有 画 图 讲 解 \color{red}如果没有看得很明白,没有关系,继续往下,后面有画图讲解 如果没有看得很明白,没有关系,继续往下,后面有画图讲解
七、RangeDataCollator::CropAndMerge() 代码注释
// 对时间段内的数据进行截取与合并, 返回时间同步后的点云
sensor::TimedPointCloudOriginData RangeDataCollator::CropAndMerge() {
sensor::TimedPointCloudOriginData result{current_end_, {}, {}};
bool warned_for_dropped_points = false;
// 遍历所有的传感器话题
for (auto it = id_to_pending_data_.begin();
it != id_to_pending_data_.end();) {
// 获取数据的引用
sensor::TimedPointCloudData& data = it->second;
const sensor::TimedPointCloud& ranges = it->second.ranges;
const std::vector<float>& intensities = it->second.intensities;
// 找到点云中 最后一个时间戳小于current_start_的点的索引
auto overlap_begin = ranges.begin();
while (overlap_begin < ranges.end() &&
data.time + common::FromSeconds((*overlap_begin).time) <
current_start_) {
++overlap_begin;
}
// 找到点云中 最后一个时间戳小于等于current_end_的点的索引
auto overlap_end = overlap_begin;
while (overlap_end < ranges.end() &&
data.time + common::FromSeconds((*overlap_end).time) <=
current_end_) {
++overlap_end;
}
// 丢弃点云中时间比起始时间早的点, 每执行一下CropAndMerge()打印一次log
if (ranges.begin() < overlap_begin && !warned_for_dropped_points) {
LOG(WARNING) << "Dropped " << std::distance(ranges.begin(), overlap_begin)
<< " earlier points.";
warned_for_dropped_points = true;
}
// Copy overlapping range.
if (overlap_begin < overlap_end) {
// 获取下个点云的index, 即当前vector的个数
std::size_t origin_index = result.origins.size();
result.origins.push_back(data.origin); // 插入原点坐标
// 获取此传感器时间与集合时间戳的误差,
const float time_correction =
static_cast<float>(common::ToSeconds(data.time - current_end_));
auto intensities_overlap_it =
intensities.begin() + (overlap_begin - ranges.begin());
// reserve() 在预留空间改变时, 会将之前的数据拷贝到新的内存中
result.ranges.reserve(result.ranges.size() +
std::distance(overlap_begin, overlap_end));
// 填充数据
for (auto overlap_it = overlap_begin; overlap_it != overlap_end;
++overlap_it, ++intensities_overlap_it) {
sensor::TimedPointCloudOriginData::RangeMeasurement point{
*overlap_it, *intensities_overlap_it, origin_index};
// current_end_ + point_time[3]_after == in_timestamp +
// point_time[3]_before
// 针对每个点时间戳进行修正, 让最后一个点的时间为0
point.point_time.time += time_correction;
result.ranges.push_back(point);
} // end for
} // end if
// Drop buffered points until overlap_end.
// 如果点云每个点都用了, 则可将这个数据进行删除
if (overlap_end == ranges.end()) {
it = id_to_pending_data_.erase(it);
}
// 如果一个点都没用, 就先放这, 看下一个数据
else if (overlap_end == ranges.begin()) {
++it;
}
// 用了一部分的点
else {
const auto intensities_overlap_end =
intensities.begin() + (overlap_end - ranges.begin());
// 将用了的点删除, 这里的赋值是拷贝
data = sensor::TimedPointCloudData{
data.time, data.origin,
sensor::TimedPointCloud(overlap_end, ranges.end()),
std::vector<float>(intensities_overlap_end, intensities.end())};
++it;
}
} // end for
// 对各传感器的点云 按照每个点的时间从小到大进行排序
std::sort(result.ranges.begin(), result.ranges.end(),
[](const sensor::TimedPointCloudOriginData::RangeMeasurement& a,
const sensor::TimedPointCloudOriginData::RangeMeasurement& b) {
return a.point_time.time < b.point_time.time;
});
return result;
}
八、RangeDataCollator 图解汇总
首先为了方便理解,本人绘画了下图(假设有两个雷达),从 RangeDataCollator::AddRangeData() 函数开始i分析。
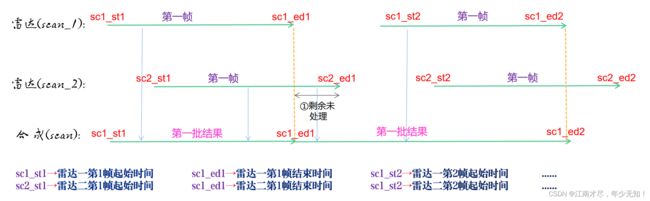
( 01 ) : \color{blue}(01): (01): 假设现在雷达一(scan_1) 第一次执行 RangeDataCollator::AddRangeData() 函数,那么 id_to_pending_data_ 为空,则把 scan_1 的第一帧点云数据直接添加到 id_to_pending_data_ 中。然后判断
scan_1、scan_2 数据是否都到来,显然没有没有,因为雷达二还没有执行,所以 return。
( 02 ) : \color{blue}(02): (02): 现假设第二个雷达(scan_2)订阅话题数据第一帧到来,注意此时 scan_2 也是第一次调用 RangeDataCollator::AddRangeData() 函数。虽然 id_to_pending_data_ 中存储了 scan_1 中的第一帧数据,但是没有存储 scan_2的数据,所以依旧不满足条件 id_to_pending_data_.count(sensor_id) != 0。
( 03 ) : \color{blue}(03): (03): 将 scan_2 的数据也添加到 id_to_pending_data_ 之中,也就是说此时 id_to_pending_data_ 包含了 scan_1 与 scan_2的数据。也就是 expected_sensor_ids_ 的话题已经全部到齐。那么把 current_end_ 赋值 给 current_start_ (由于这是第一次赋值,current_end_ 与 current_start_ 都是相同的,为最小时间点,也就是比上图的 s c 1 _ s t 1 \color{green} sc1\_st1 sc1_st1 还要早),id_to_pending_data_ 中已经存储了 scan_1 与 scan_2 各一帧数据,则找到他们之中之间最早时间戳,我们这里的例子当然就是 scan_1 第一帧点云的时间戳,需要注意的是,这里说的时间戳,是点云帧数据最后一个点的时间戳,对应与上图中的 s c 1 _ e d 1 \color{green} sc1\_ed1 sc1_ed1。然后把其赋值给 current_end_。
( 04 ) : \color{blue}(04): (04): 第一次调用 CropAndMerge() 函数进行数据同步,遍历所有的传感器话题。
( 05 ) : \color{blue}(05): (05): 假设现在首先遍历到 secan_1:
① 则获得 secan_1 第一帧总体数据记为data,点云数据记为 ranges,强度记为 intensities。
②对点云数据ranges进行遍历,找到比 current_start_ 还要小的最后一个点云时间戳。显然是找不到的,如上图,因为 s c 1 _ s t 1 \color{green} sc1\_st1 sc1_st1 已经大于 current_start_ 了,也就是该帧点云数据中,最早的点云数据,都是迟于 current_start_ 的,虽然找不到,但是迭代器指向了 ranges.begin(),也就是 s c 1 _ e d 1 \color{green} sc1\_ed1 sc1_ed1
③对点云数据ranges进行遍历,找到点云中 最后一个时间戳小于等于current_end_的点的迭代器,这个呢还是可以找的的,此时的 current_end_ 为上图的 s c 1 _ e d 1 \color{green} sc1\_ed1 sc1_ed1,也就是说,找到了最后一个点云数据。
④如果overlap_begin < overlap_end,说明找到了数据。该例子中,到这里肯定是成立的,实际上 overlap_begin 到 overlap_end 目前刚好就上图中 s c 1 _ s t 1 \color{green} sc1\_st1 sc1_st1 到 s c 1 _ e d 1 \color{green} sc1\_ed1 sc1_ed1 也就是 secan_1 第一帧数据。这写数据都会被插入到变量:
sensor::TimedPointCloudOriginData result{current_end_, {}, {}};
( 06 ) : \color{blue}(06): (06): 假设现在首先遍历到 secan_2,因为 secan_1 的第一帧数据已经添加到 result 中,同理会其会把 secan_2 的第一帧数据也添加到 result 之中,但是需要注意的是,这里不会全部添加,如上图所示,只会添加 s c 2 _ s t 1 \color{green} sc2\_st1 sc2_st1 到 s c 1 _ e d 1 \color{green} sc1\_ed1 sc1_ed1 的数据。
( 07 ) : \color{blue}(07): (07): 把添加到 result 中的数据,都从 id_to_pending_data_ 中删除。也就说,id_to_pending_data_ 中目前只剩下上图中黑色字体【①剩余未处理】时间段的数据。然后对数据进行排序,最终排序之后的 result 包含的数据为 【 雷 达 一 : s c 1 _ s t 1 − s c 1 _ e d 1 \color{green}雷达一:sc1\_st1-\color{green} sc1\_ed1 雷达一:sc1_st1−sc1_ed1】与【 雷 达 二 : s c 2 _ s t 1 − s c 1 _ e d 1 \color{green} 雷达二: sc2\_st1-\color{green} sc1\_ed1 雷达二:sc2_st1−sc1_ed1】的数据,然后返回。
( 08 ) : \color{blue}(08): (08): 记住一个点,那就是目前的 s c 1 _ e d 1 \color{green} sc1\_ed1 sc1_ed1 时间戳就是代码中的 current_end_。
( 09 ) : \color{blue}(09): (09): 现在假设 雷达一secan_1 的第二帧数据来了,即 雷达一secan_1 第二次执行 RangeDataCollator::AddRangeData() 函数,此时进来,其 id_to_pending_data_ 中是没有 secan_1 的数据的,其只有 secan_2 的数据,所以 id_to_pending_data_.count(sensor_id) != 0 不成立。那么 secan_1 把第二帧数据添加到 id_to_pending_data_ 之中。
( 10 ) : \color{blue}(10): (10): 那么 id_to_pending_data_ 包含了 expected_sensor_ids_ 的所有数据(secan_1与secan_2) ,虽然 secan_2 只有上次剩余的一小部分。此时把 s c 1 _ e d 1 \color{green} sc1\_ed1 sc1_ed1 = current_end_ 赋值给 current_start_,然后后又把 current_end_ 设置为 s c 1 _ e d 2 \color{green} sc1\_ed2 sc1_ed2。然后调用 CropAndMerge()。
( 11 ) : \color{blue}(11): (11): 根据前面的分析 ,此次调用 RangeDataCollator::CropAndMerge() 获得的是 【 雷 达 二 : s c 1 _ e d 1 − s c 2 _ e d 1 \color{green} 雷达二:sc1\_ed1-\color{green} sc2\_ed1 雷达二:sc1_ed1−sc2_ed1】与 【 雷 达 一 : s c 1 _ e d 1 − s c 1 _ e d 2 \color{green} 雷达一:sc1\_ed1-\color{green} sc1\_ed2 雷达一:sc1_ed1−sc1_ed2】排序之后的合成数。
( 12 ) : \color{blue}(12): (12): 在(09)的假设是 雷达一secan_1 的第二帧数据来了,但是也有可能是 雷达一secan_2 的第二帧数据来了,此时满足条件 id_to_pending_data_.count(sensor_id) != 0。那么把 s c 1 _ e d 1 \color{green} sc1\_ed1 sc1_ed1 = current_end_ 赋值给 current_start_,然后后又把 current_end_ 设置为 s c 2 _ e d 1 \color{green} sc2\_ed1 sc2_ed1 ,进行处理,简单的说,就是 雷达一 的数据还来,雷达二的数据就来了,说明雷达二 的数据来的快,那么就赶紧把上次雷达二剩下的数据处理掉,然后在把现在雷达二的数据添加到 id_to_pending_data_ 之中,最后返回结果。这部分内容没有在图上体现。
九、结语
其中在 RangeDataCollator::CropAndMerge() 函数中,有个点没有详细讲解,看到如下函数:
// 丢弃点云中时间比起始时间早的点, 每执行一下CropAndMerge()打印一次log
if (ranges.begin() < overlap_begin && !warned_for_dropped_points) {
LOG(WARNING) << "Dropped " << std::distance(ranges.begin(), overlap_begin)
<< " earlier points.";
warned_for_dropped_points = true;
}
该情况只有在同一传感器发送给来的数据,存在重叠时间戳部分,一般来说是不会这样的,具体什么情况下会发生本人暂时也不太清楚,如果后续遇到了会补上。或者知道的朋友也可以告诉我,感激不尽。