resnet+Attention项目完整代码学习
项目名称:CBAM.PyTorch-master
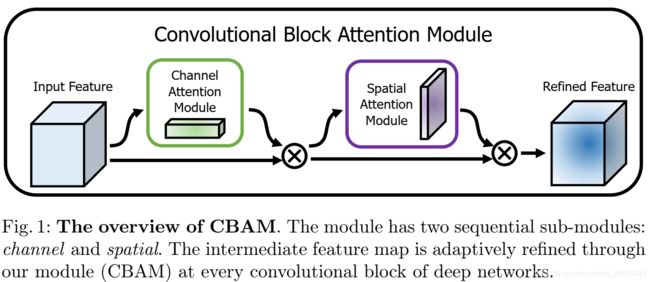
来源论文:CBAM: Convolutional Block Attention Module--CVPR2018
项目路径信息:

train.py
import os
from collections import OrderedDict
import argparse
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim import lr_scheduler
import torchvision
from torchvision import transforms, models, datasets
import matplotlib.pyplot as plt
from data_loader.ImageNet_datasets import ImageNetData
import model.resnet_cbam as resnet_cbam
from model.Medical import CovNet
from trainer.trainer import Trainer
from utils.logger import Logger
from PIL import Image
from torchnet.meter import ClassErrorMeter
from tensorboardX import SummaryWriter
import torch.backends.cudnn as cudnn
import warnings
warnings.filterwarnings("ignore")
resize=224
def load_state_dict(model_dir, is_multi_gpu):
state_dict = torch.load(model_dir, map_location=lambda storage, loc: storage)['state_dict']
if is_multi_gpu:
new_state_dict = OrderedDict()
for k, v in state_dict.items():
name = k[7:] # remove `module.`
new_state_dict[name] = v
return new_state_dict
else:
return state_dict
def main(args):
if 0 == len(args.resume):
logger = Logger('./logs/'+args.model+'.log')
else:
logger = Logger('./logs/'+args.model+'.log', True)
logger.append(vars(args))
if args.display:
writer = SummaryWriter()
else:
writer = None
gpus = args.gpu.split(',')
data_transforms = {
'train': transforms.Compose([
# transforms.RandomResizedCrop(224),
# transforms.RandomHorizontalFlip(),
transforms.Resize((args.imagesize, args.imagesize)),
# transforms.RandomHorizontalFlip(),
transforms.RandomVerticalFlip(),
transforms.ToTensor(),
# transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
'val': transforms.Compose([
transforms.Resize((args.imagesize, args.imagesize)),
transforms.ToTensor(),
# transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
}
train_datasets = datasets.ImageFolder(os.path.join(args.data_root, 't256'), data_transforms['train'])
val_datasets = datasets.ImageFolder(os.path.join(args.data_root, 'v256'), data_transforms['val'])
train_dataloaders = torch.utils.data.DataLoader(train_datasets, batch_size=args.batch_size*len(gpus), shuffle=True, num_workers=4)
val_dataloaders = torch.utils.data.DataLoader(val_datasets, batch_size=16, shuffle=True, num_workers=4)
unloader = transforms.ToPILImage()
if args.debug:
x, y =next(iter(train_dataloaders))
# image = x[0].squeeze(0) # remove the fake batch dimension
# image = unloader(image)
# image.save('example.jpg')
#
plt.text(2, -20, "labels:" + str(y.numpy()), fontsize=15)
grid_img = torchvision.utils.make_grid(x, nrow=8)
plt.imshow(grid_img.permute(1, 2, 0))
plt.show()
print("x.shape",x.shape)
# print(y.shape)
# print("y",y)
# logger.append([x, y])
os.environ['CUDA_VISIBLE_DEVICES'] = args.gpu
is_use_cuda = torch.cuda.is_available()
cudnn.benchmark = True
if 'resnet50' == args.model:
my_model = models.resnet50(pretrained=False)
my_model.fc = nn.Linear(2048, 5)
elif 'resnet18' == args.model:
my_model = models.resnet18(pretrained=True)
my_model.fc = nn.Linear(512, 5)
elif 'resnet50_cbam' == args.model:
my_model = resnet_cbam.resnet50_cbam(pretrained=True)
my_model.fc = nn.Linear(2048, 5)
elif 'resnet101_cbam' == args.model:
my_model = resnet_cbam.resnet101_cbam(pretrained=True)
my_model.fc = nn.Linear(2048, 2)
# my_model.sfT = nn.Sigmoid()
elif 'resnet101' == args.model:
my_model = models.resnet101(pretrained=True)
my_model.fc = nn.Linear(2048, 2)
# my_model.sfT = nn.Sigmoid()
elif 'resnet152_cbam' == args.model:
my_model = resnet_cbam.resnet152_cbam(pretrained=True)
my_model.fc = nn.Linear(2048, 2)
# my_model.sfT = nn.Sigmoid()
elif 'resnet152' == args.model:
my_model = models.resnet152(pretrained=True)
my_model.fc = nn.Linear(2048, 2)
# my_model.sfT = nn.Sigmoid()
elif 'vgg19' == args.model:
my_model = models.vgg19(pretrained=True)
my_model.fc = nn.Linear(1000, 5)
# my_model.sfT = nn.Sigmoid()
elif 'CovNet' == args.model.split('_')[0]:
my_model=CovNet(5)
else:
raise ModuleNotFoundError
#my_model.apply(fc_init)
if is_use_cuda and 1 == len(gpus):
my_model = my_model.cuda()
elif is_use_cuda and 1 < len(gpus):
my_model = nn.DataParallel(my_model.cuda())
print(my_model)
loss_fn = [nn.CrossEntropyLoss()]
optimizer = optim.SGD(my_model.parameters(), lr=0.01, momentum=0.9, weight_decay=1e-4)
lr_schedule = lr_scheduler.MultiStepLR(optimizer, milestones=[20,40, 60], gamma=0.1)
metric = [ClassErrorMeter([1,2], True)]
start_epoch = 0
num_epochs = 50
my_trainer = Trainer(my_model, args.model, loss_fn, optimizer, lr_schedule, 6, is_use_cuda, train_dataloaders, \
val_dataloaders, metric, start_epoch, num_epochs, args.debug, logger, writer)
my_trainer.fit()
# logger.append('Optimize Done!')
if __name__ == '__main__':
parser = argparse.ArgumentParser(description='PyTorch Template')
parser.add_argument('-r', '--resume', default='', type=str,
help='path to latest checkpoint (default: None)')
parser.add_argument('--debug', action='store_true', default=True,dest='debug',
help='trainer debug flag')
parser.add_argument('-g', '--gpu', default='0', type=str,
help='GPU ID Select')
parser.add_argument('-d', '--data_root', default='./datasets',
type=str, help='data root')
parser.add_argument('-t', '--train_file', default='./datasets/train.txt',
type=str, help='train file')
parser.add_argument('-v', '--val_file', default='./datasets/val.txt',
type=str, help='validation file')
parser.add_argument('-m', '--model', default='CovNet',
type=str, help='model type')
parser.add_argument('--batch_size', default=32,
type=int, help='model train batch size')
parser.add_argument('--display', action='store_true', dest='display',default=True,
help='Use TensorboardX to Display')
parser.add_argument('--imagesize', default=224,
type=int, help='model train batch size')
args = parser.parse_args()
main(args)
test.py
import os
from collections import OrderedDict
from PIL import Image
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.autograd import Variable
from torch.optim import lr_scheduler
from torchvision import transforms, models
from model import *
# import pretrainedmodels
import numpy as np
import model.resnet_cbam as resnet_cbam
#DATA_ROOT = './datasets/xuelang_round1_test_a_20180709'
#DATA_ROOT = './datasets/xuelang_round1_test_b'
DATA_ROOT = './datasets/xuelang_round2_test_a_20180809'
RESULT_FILE = 'result.csv'
import warnings
warnings.filterwarnings("ignore")
def test_and_generate_result(epoch_num, model_name='resnet101', img_size=320, is_multi_gpu=False):
data_transform = transforms.Compose([
transforms.Resize(img_size, Image.ANTIALIAS),
transforms.ToTensor(),
transforms.Normalize([0.53744068, 0.51462684, 0.52646497], [0.06178288, 0.05989952, 0.0618901])
])
os.environ['CUDA_VISIBLE_DEVICES'] = '4'
is_use_cuda = torch.cuda.is_available()
if 'resnet152' == model_name.split('_')[0]:
model_ft = models.resnet152(pretrained=True)
my_model = resnet152.MyResNet152(model_ft)
del model_ft
elif 'resnet50' == model_name.split('_')[0]:
model_ft = models.resnet50(pretrained=True)
my_model = resnet50.MyResNet50(model_ft)
del model_ft
elif 'resnet101' == model_name.split('_')[0]:
model_ft = models.resnet101(pretrained=True)
my_model = resnet101.MyResNet101(model_ft)
del model_ft
elif 'densenet121' == model_name.split('_')[0]:
model_ft = models.densenet121(pretrained=True)
my_model = densenet121.MyDenseNet121(model_ft)
del model_ft
elif 'densenet169' == model_name.split('_')[0]:
model_ft = models.densenet169(pretrained=True)
my_model = densenet169.MyDenseNet169(model_ft)
del model_ft
elif 'densenet201' == model_name.split('_')[0]:
model_ft = models.densenet201(pretrained=True)
my_model = densenet201.MyDenseNet201(model_ft)
del model_ft
elif 'densenet161' == model_name.split('_')[0]:
model_ft = models.densenet161(pretrained=True)
my_model = densenet161.MyDenseNet161(model_ft)
del model_ft
elif 'ranet' == model_name.split('_')[0]:
my_model = ranet.ResidualAttentionModel_92()
elif 'senet154' == model_name.split('_')[0]:
model_ft = pretrainedmodels.models.senet154(num_classes=1000, pretrained='imagenet')
my_model = MySENet154(model_ft)
del model_ft
else:
raise ModuleNotFoundError
state_dict = torch.load('./checkpoint/' + model_name + '/Models_epoch_' + epoch_num + '.ckpt', map_location=lambda storage, loc: storage.cuda())['state_dict']
if is_multi_gpu:
new_state_dict = OrderedDict()
for k, v in state_dict.items():
name = k[7:] # remove `module.`
new_state_dict[name] = v
my_model.load_state_dict(new_state_dict)
else:
my_model.load_state_dict(state_dict)
if is_use_cuda:
my_model = my_model.cuda()
my_model.eval()
with open(os.path.join('checkpoint', model_name, model_name+'_'+str(img_size)+'_'+RESULT_FILE), 'w', encoding='utf-8') as fd:
fd.write('filename|defect,probability\n')
test_files_list = os.listdir(DATA_ROOT)
for _file in test_files_list:
file_name = _file
if '.jpg' not in file_name:
continue
file_path = os.path.join(DATA_ROOT, file_name)
img_tensor = data_transform(Image.open(file_path).convert('RGB')).unsqueeze(0)
if is_use_cuda:
img_tensor = Variable(img_tensor.cuda(), volatile=True)
output = F.softmax(my_model(img_tensor), dim=1)
defect_prob = round(output.data[0, 1], 6)
if defect_prob == 0.:
defect_prob = 0.000001
elif defect_prob == 1.:
defect_prob = 0.999999
target_str = '%s,%.6f\n' % (file_name, defect_prob)
fd.write(target_str)
def test_and_generate_result_round2(epoch_num, model_name='resnet101', img_size=224, is_multi_gpu=False):
data_transform = transforms.Compose([
transforms.Resize((img_size,img_size),Image.ANTIALIAS),
transforms.ToTensor(),
# transforms.Normalize([0.53744068, 0.51462684, 0.52646497], [0.06178288, 0.05989952, 0.0618901])
])
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
is_use_cuda = torch.cuda.is_available()
print(epoch_num)
print(model_name)
print(img_size)
print(is_multi_gpu)
#
# if 'resnet152' == model_name.split('_')[0]:
# model_ft = models.resnet152(pretrained=True)
# my_model = resnet152.MyResNet152(model_ft)
# del model_ft
# elif 'resnet152-r2' == model_name.split('_')[0]:
# model_ft = models.resnet152(pretrained=True)
# my_model = resnet152.MyResNet152_Round2(model_ft)
# del model_ft
# elif 'resnet152-r2-2o' == model_name.split('_')[0]:
# model_ft = models.resnet152(pretrained=True)
# my_model = resnet152.MyResNet152_Round2_2out(model_ft)
# del model_ft
# elif 'resnet152-r2-2o-gmp' == model_name.split('_')[0]:
# model_ft = models.resnet152(pretrained=True)
# my_model = resnet152.MyResNet152_Round2_2out_GMP(model_ft)
# del model_ft
# elif 'resnet152-r2-hm-r1' == model_name.split('_')[0]:
# model_ft = models.resnet152(pretrained=True)
# my_model = resnet152.MyResNet152_Round2_HM_round1(model_ft)
# del model_ft
# elif 'resnet50' == model_name.split('_')[0]:
# model_ft = models.resnet50(pretrained=True)
# my_model = resnet50.MyResNet50(model_ft)
# del model_ft
# elif 'resnet101' == model_name.split('_')[0]:
# model_ft = models.resnet101(pretrained=True)
# my_model = resnet101.MyResNet101(model_ft)
# del model_ft
# elif 'densenet121' == model_name.split('_')[0]:
# model_ft = models.densenet121(pretrained=True)
# my_model = densenet121.MyDenseNet121(model_ft)
# del model_ft
# elif 'densenet169' == model_name.split('_')[0]:
# model_ft = models.densenet169(pretrained=True)
# my_model = densenet169.MyDenseNet169(model_ft)
# del model_ft
# elif 'densenet201' == model_name.split('_')[0]:
# model_ft = models.densenet201(pretrained=True)
# my_model = densenet201.MyDenseNet201(model_ft)
# del model_ft
# elif 'densenet161' == model_name.split('_')[0]:
# model_ft = models.densenet161(pretrained=True)
# my_model = densenet161.MyDenseNet161(model_ft)
# del model_ft
# elif 'ranet' == model_name.split('_')[0]:
# my_model = ranet.ResidualAttentionModel_92()
# elif 'senet154' == model_name.split('_')[0]:
# model_ft = pretrainedmodels.models.senet154(num_classes=1000, pretrained='imagenet')
# my_model = MySENet154(model_ft)
# del model_ft
# else:
# raise ModuleNotFoundError
if 'resnet50' == model_name.split('_')[0]:
my_model = models.resnet50(pretrained=False)
elif 'resnet50-cbam' == model_name.split('_')[0]:
my_model = resnet_cbam.resnet50_cbam(pretrained=False)
elif 'resnet101' == model_name.split('_')[0]:
my_model = models.resnet101(pretrained=True)
my_model.fc = nn.Linear(2048, 2)
# my_model.sfT = nn.Sigmoid()
else:
raise ModuleNotFoundError
print('./checkpoint/' + model_name + '/Models_epoch_' + epoch_num + '.ckpt')
state_dict = torch.load('./checkpoint/' + model_name + '/Models_epoch_' + epoch_num + '.ckpt', map_location=lambda storage, loc: storage.cuda())['state_dict']
if is_multi_gpu:
new_state_dict = OrderedDict()
for k, v in state_dict.items():
name = k[7:] # remove `module.`
new_state_dict[name] = v
my_model.load_state_dict(new_state_dict)
else:
my_model.load_state_dict(state_dict)
if is_use_cuda:
my_model = my_model.cuda()
my_model.eval()
with open(os.path.join('checkpoint', model_name, model_name+'_'+str(img_size)+'_'+RESULT_FILE), 'w', encoding='utf-8') as fd:
print("566", is_multi_gpu)
fd.write('filename|defect,probability\n')
test_files_list = os.listdir(DATA_ROOT)
print("566", test_files_list)
ii=0
for _file in test_files_list:
# print("566")
file_name = _file
# if '.jpg' not in file_name:
# continue
file_path = os.path.join(DATA_ROOT, file_name)
print(ii)
ii += 1
# print("5667",file_path)
img_tensor = data_transform(Image.open(file_path).convert('RGB')).unsqueeze(0)
# print("5667",img_tensor)
if is_use_cuda:
img_tensor = Variable(img_tensor.cuda(), volatile=True)
# _, output, _ = my_model(img_tensor)
print( ":", img_tensor.shape)
output = my_model(img_tensor)
print( "2222222222222:", output.data)
output = F.softmax(output, dim=1)
print( "33333333333333:", output.data[0, 0])
for k in range(2):
# print(k,":",output.data)
print("44444444444:", output.data[0, k])
defect_prob =np.round(output.data[0, k].cpu().numpy(), 6)
print("np.round:", defect_prob)
if defect_prob == 0.:
defect_prob = 0.000001
elif defect_prob == 1.:
defect_prob = 0.999999
target_str = '%s,%.6f\n' % (file_name + '|' + ('norm' if 0 == k else 'defect_'+str(k)), defect_prob)
print("target_str:",target_str)
fd.write(target_str)
if __name__ == '__main__':
#test_and_generate_result('10', 'resnet152_2018073100', 416, True)
#test_and_generate_result('2', 'resnet50_2018072500', 416, True)
#test_and_generate_result('7','resnet101_2018072600', 416, True)
#test_and_generate_result_round2('14','resnet152-r2-2o-gmp_2018081600', 600, True)
#test_and_generate_result_round2('14', 'resnet152-r2-2o_2018081300', 600, True)
#test_and_generate_result('12', 'densenet161_new_stra', 352, True)
#test_and_generate_result('25', 'ranet_2018072400', 416, True)
#test_and_generate_result('8', 'senet154_2018072500', 416, True)
# test_and_generate_result_round2('9','resnet152-r2-hm-r1_2018082000', 576, True)
test_and_generate_result_round2('9','resnet101', 224, False)
loger.py
import os
import sys
import numpy as np
import matplotlib.pyplot as plt
import traceback
class Logger(object):
'''Save training process to log file with simple plot function.'''
def __init__(self, fpath,resume=False):
self.file = None
self.resume = resume
if os.path.isfile(fpath):
if resume:
self.file = open(fpath, 'a')
else:
self.file = open(fpath, 'w')
else:
self.file = open(fpath, 'w')
def append(self, target_str):
if not isinstance(target_str, str):
try:
target_str = str(target_str)
except:
traceback.print_exc()
else:
# print(self.file)
# print(target_str)
self.file.write(target_str + '\n')
self.file.flush()
else:
self.file.write(target_str + '\n')
self.file.flush()
def close(self):
if self.file is not None:
self.file.close()train.py
import numpy as np
import torch
import torch.nn.functional as F
from torch.autograd import Variable
import time
import sys
import os
import torchvision
import matplotlib.pyplot as plt
class Trainer():
def __init__(self, model, model_type, loss_fn, optimizer, lr_schedule, log_batchs, is_use_cuda, train_data_loader, \
valid_data_loader=None, metric=None, start_epoch=0, num_epochs=25, is_debug=False, logger=None, writer=None):
self.model = model
self.model_type = model_type
self.loss_fn = loss_fn
self.optimizer = optimizer
self.lr_schedule = lr_schedule
self.log_batchs = log_batchs
self.is_use_cuda = is_use_cuda
self.train_data_loader = train_data_loader
self.valid_data_loader = valid_data_loader
self.metric = metric
self.start_epoch = start_epoch
self.num_epochs = num_epochs
self.is_debug = is_debug
self.cur_epoch = start_epoch
self.best_acc = 0.
self.best_loss = sys.float_info.max
self.logger = logger
self.writer = writer
self.global_step=0
def fit(self):
for epoch in range(0, self.start_epoch):
self.lr_schedule.step()
for epoch in range(self.start_epoch, self.num_epochs):
self.logger.append('Epoch {}/{}'.format(epoch, self.num_epochs - 1))
self.logger.append('-' * 60)
self.cur_epoch = epoch
# print(self.optimizer.state_dict()['param_groups'][0]['lr'])
if self.is_debug:
self._dump_infos()
self._train()
self.lr_schedule.step()
self._valid()
self._save_best_model()
# print()
def _dump_infos(self):
self.logger.append('---------------------Current Parameters---------------------')
self.logger.append('is use GPU: ' + ('True' if self.is_use_cuda else 'False'))
self.logger.append('lr: %f' % (self.lr_schedule.get_lr()[0]))
self.logger.append('model_type: %s' % (self.model_type))
self.logger.append('current epoch: %d' % (self.cur_epoch))
self.logger.append('best accuracy: %f' % (self.best_acc))
self.logger.append('best loss: %f' % (self.best_loss))
self.logger.append('------------------------------------------------------------')
def _train(self):
self.model.train() # Set model to training mode
losses = []
if self.metric is not None:
# print("self.metric11",self.metric)
# print("self.metric12",self.metric[0])
self.metric[0].reset()
print("self.train_data_loader.len()",len(self.train_data_loader))
for i, (inputs, labels) in enumerate(self.train_data_loader): # Notice
self.writer.add_image("label:"+str(labels[0]), inputs[0], global_step=i, walltime=None, dataformats='CHW')
if self.is_use_cuda:
inputs, labels = inputs.cuda(), labels.cuda()
labels = labels.squeeze()
else:
labels = labels.squeeze()
self.optimizer.zero_grad()
outputs = self.model(inputs) # Notice
# print("outputs.shape",outputs.shape)
# print("labels.shape",labels.shape)
# print("labels",labels)
# print("outputs :",outputs )
# print("prob :",prob )
# print("pass:",torch.argmax(outputs,1))
# plt.text(2, -20, "labels:" + str(labels.cpu().numpy()), fontsize=15)
# grid_img = torchvision.utils.make_grid(inputs.cpu(), nrow=8)
# plt.imshow(grid_img.permute(1, 2, 0))
# plt.title("TEST")
# plt.show()
loss = self.loss_fn[0](outputs, labels)
if i%10==0:
print("epoch:{},iter:{}, loss:{}".format(self.cur_epoch,i,loss.item()))
if self.metric is not None:
# print("outputsoutputs", outputs)
prob = F.softmax(outputs, dim=1).data.cpu()
# print("probprobprobprob",prob)
# print("probprobprobprob",labels)
self.metric[0].add(prob, labels.data.cpu())
loss.backward()
self.optimizer.step()
losses.append(loss.item()) # Notice
# print("0 == i % self.log_batchs0 == i % self.log_batchs",0 == i % self.log_batchs)
if 0 == i % self.log_batchs or (i == len(self.train_data_loader) - 1):
local_time_str = time.strftime('%Y-%m-%d %H:%M:%S', time.localtime(time.time()))
batch_mean_loss = np.mean(losses)
print_str = '[%s]\tTraining Batch[%d/%d]\t Class Loss: %.4f\t' \
% (local_time_str, i, len(self.train_data_loader) - 1, batch_mean_loss)
if i == len(self.train_data_loader) - 1 and self.metric is not None:
top1_acc_score = self.metric[0].value()[0]
top5_acc_score = self.metric[0].value()[1]
print_str += '@Top-1 Score: %.4f\t' % (top1_acc_score)
print_str += '@Top-5 Score: %.4f\t' % (top5_acc_score)
self.logger.append(print_str)
self.writer.add_scalar('loss/loss_c', batch_mean_loss, self.global_step)
self.global_step+=1
def _valid(self):
self.model.eval()
losses = []
acc_rate = 0.
if self.metric is not None:
self.metric[0].reset()
with torch.no_grad(): # Notice
for i, (inputs, labels) in enumerate(self.valid_data_loader):
if self.is_use_cuda:
inputs, labels = inputs.cuda(), labels.cuda()
labels = labels.squeeze()
else:
labels = labels.squeeze()
outputs = self.model(inputs) # Notice
loss = self.loss_fn[0](outputs, labels)
if self.metric is not None:
prob = F.softmax(outputs, dim=1).data.cpu()
# print("abels :", labels)
# print("outputs :",outputs )
# print("prob :",prob )
# print("pass:",torch.argmax(prob,1))
self.metric[0].add(prob, labels.data.cpu())
# print("self.metric[0].value():",self.metric[0].value())
losses.append(loss.item())
local_time_str = time.strftime('%Y-%m-%d %H:%M:%S', time.localtime(time.time()))
#self.logger.append(losses)
batch_mean_loss = np.mean(losses)
print_str = '[%s]\tValidation: \t Class Loss: %.4f\t' \
% (local_time_str, batch_mean_loss)
if self.metric is not None:
top1_acc_score = self.metric[0].value()[0]
top5_acc_score = self.metric[0].value()[1]
print_str += '@Top-1 Score: %.4f\t' % (top1_acc_score)
print_str += '@Top-5 Score: %.4f\t' % (top5_acc_score)
self.logger.append(print_str)
print("cur_epoch:",self.cur_epoch,"top1_acc_s:",top1_acc_score,"best_acc:",self.best_acc,"batch_mean_loss:",batch_mean_loss,"best_loss",self.best_loss)
if top1_acc_score >= self.best_acc:
self.best_acc = top1_acc_score
self.best_loss = batch_mean_loss
def _save_best_model(self):
# Save Model
self.logger.append('Saving Model...')
state = {
'state_dict': self.model.state_dict(),
'best_acc': self.best_acc,
'cur_epoch': self.cur_epoch,
'num_epochs': self.num_epochs
}
if not os.path.isdir('./checkpoint/' + self.model_type):
os.makedirs('./checkpoint/' + self.model_type)
torch.save(state, './checkpoint/' + self.model_type + '/Models' + '_epoch_%d' % self.cur_epoch + '.ckpt') # Noticemodel
Medical.py
import torch,cv2
import os,glob
import random,csv
from torch.utils.data import Dataset,DataLoader
from torchvision import transforms
from PIL import Image
import matplotlib.pyplot as plt
import numpy as np
from torch import nn
import torchvision
from torch.nn import functional as F
try:
from skimage import data_dir
from skimage import io
from skimage import color
from skimage import img_as_float,transform
from skimage.transform import resize
except ImportError:
raise ImportError("This example requires scikit-image")
class Flatten(nn.Module):
def __init__(self):
super(Flatten, self).__init__()
def forward(self, x):
shape = torch.prod(torch.tensor(x.shape[1:])).item()
out=x.view(-1, shape)
return out
class ConBlk(nn.Module):
def __init__(self):
super(ConBlk,self).__init__()
self.conv1 = nn.Conv2d(3, 36, kernel_size=3, stride=2, padding=1)
self.pool1=nn.MaxPool2d(2,2)
self.bn1 = nn.BatchNorm2d(36)
self.conv2 = nn.Conv2d(36, 36, kernel_size=3, stride=2, padding=1)
self.pool2 = nn.MaxPool2d(2,2)
self.bn2 = nn.BatchNorm2d(36)
self.conv3 = nn.Conv2d(36, 36, kernel_size=3, stride=1, padding=1)
self.pool3 = nn.MaxPool2d(2,2)
# self.bn3 = nn.BatchNorm2d(36)
self.fla=Flatten()
def forward(self,x):
x1=F.relu(self.bn1(self.pool1(self.conv1(x))))
# print("x1.shape",x1.shape)
x2=F.relu(self.bn2(self.pool2(self.conv2(x1))))
# print("x2.shape", x2.shape)
x3=F.relu(self.pool3(self.conv3(x2)))
# print("x3.shape", x3.shape)
out=self.fla(x3)
return out
class CovNet(nn.Module):
def __init__(self,num_class=2):
super(CovNet, self).__init__()
self.blk1=ConBlk()
self.outlayer = nn.Sequential(
nn.Linear(1764, 1024),
nn.Dropout(0.5),
nn.Linear(1024, num_class),
)
def forward(self, x):
out=self.blk1(x)
# print("out.shape:::",out.shape)
out=self.outlayer(out)
return out
resnet_cbam.py
import torch
import torch.nn as nn
import math
import torch.utils.model_zoo as model_zoo
__all__ = ['ResNet', 'resnet18_cbam', 'resnet34_cbam', 'resnet50_cbam', 'resnet101_cbam',
'resnet152_cbam']
model_urls = {
'resnet18': 'https://download.pytorch.org/models/resnet18-5c106cde.pth',
'resnet34': 'https://download.pytorch.org/models/resnet34-333f7ec4.pth',
'resnet50': 'https://download.pytorch.org/models/resnet50-19c8e357.pth',
'resnet101': 'https://download.pytorch.org/models/resnet101-5d3b4d8f.pth',
'resnet152': 'https://download.pytorch.org/models/resnet152-b121ed2d.pth',
}
def conv3x3(in_planes, out_planes, stride=1):
"3x3 convolution with padding"
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class ChannelAttention(nn.Module):
def __init__(self, in_planes, ratio=16):
super(ChannelAttention, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.max_pool = nn.AdaptiveMaxPool2d(1)
self.fc1 = nn.Conv2d(in_planes, in_planes // 16, 1, bias=False)
self.relu1 = nn.ReLU()
self.fc2 = nn.Conv2d(in_planes // 16, in_planes, 1, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_out = self.fc2(self.relu1(self.fc1(self.avg_pool(x))))
max_out = self.fc2(self.relu1(self.fc1(self.max_pool(x))))
out = avg_out + max_out
return self.sigmoid(out)
class SpatialAttention(nn.Module):
def __init__(self, kernel_size=7):
super(SpatialAttention, self).__init__()
assert kernel_size in (3, 7), 'kernel size must be 3 or 7'
padding = 3 if kernel_size == 7 else 1
self.conv1 = nn.Conv2d(2, 1, kernel_size, padding=padding, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_out = torch.mean(x, dim=1, keepdim=True)
max_out, _ = torch.max(x, dim=1, keepdim=True)
x = torch.cat([avg_out, max_out], dim=1)
x = self.conv1(x)
return self.sigmoid(x)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.ca = ChannelAttention(planes)
self.sa = SpatialAttention()
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.ca(out) * out
out = self.sa(out) * out
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.ca = ChannelAttention(planes * 4)
self.sa = SpatialAttention()
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
out = self.ca(out) * out
out = self.sa(out) * out
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000):
self.inplanes = 64
super(ResNet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7, stride=1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def resnet18_cbam(pretrained=False, **kwargs):
"""Constructs a ResNet-18 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(BasicBlock, [2, 2, 2, 2], **kwargs)
if pretrained:
pretrained_state_dict = model_zoo.load_url(model_urls['resnet18'])
now_state_dict = model.state_dict()
now_state_dict.update(pretrained_state_dict)
model.load_state_dict(now_state_dict)
return model
def resnet34_cbam(pretrained=False, **kwargs):
"""Constructs a ResNet-34 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(BasicBlock, [3, 4, 6, 3], **kwargs)
if pretrained:
pretrained_state_dict = model_zoo.load_url(model_urls['resnet34'])
now_state_dict = model.state_dict()
now_state_dict.update(pretrained_state_dict)
model.load_state_dict(now_state_dict)
return model
def resnet50_cbam(pretrained=False, **kwargs):
"""Constructs a ResNet-50 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(Bottleneck, [3, 4, 6, 3], **kwargs)
if pretrained:
pretrained_state_dict = model_zoo.load_url(model_urls['resnet50'])
now_state_dict = model.state_dict()
now_state_dict.update(pretrained_state_dict)
model.load_state_dict(now_state_dict)
return model
def resnet101_cbam(pretrained=False, **kwargs):
"""Constructs a ResNet-101 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(Bottleneck, [3, 4, 23, 3], **kwargs)
if pretrained:
pretrained_state_dict = model_zoo.load_url(model_urls['resnet101'])
now_state_dict = model.state_dict()
now_state_dict.update(pretrained_state_dict)
model.load_state_dict(now_state_dict)
return model
def resnet152_cbam(pretrained=False, **kwargs):
"""Constructs a ResNet-152 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(Bottleneck, [3, 8, 36, 3], **kwargs)
if pretrained:
pretrained_state_dict = model_zoo.load_url(model_urls['resnet152'])
now_state_dict = model.state_dict()
now_state_dict.update(pretrained_state_dict)
model.load_state_dict(now_state_dict)
return model