NNDL 实验七 循环神经网络(3)LSTM的记忆能力实验
目录
6.3.1 模型构建
6.3.1.1 LSTM层
6.3.1.2 模型汇总
6.3.2 模型训练
6.3.2.1 训练指定长度的数字预测模型
6.3.2.2 多组训练
6.3.2.3 损失曲线展示
6.3.2.3 损失曲线展示
【思考题1】LSTM与SRN实验结果对比,谈谈看法。(选做)
6.3.3 模型评价
6.3.3.1 在测试集上进行模型评价
6.3.3.2 模型在不同长度的数据集上的准确率变化图
【思考题2】LSTM与SRN在不同长度数据集上的准确度对比,谈谈看法。(选做)
6.3.3.3 LSTM模型门状态和单元状态的变化
【思考题3】分析LSTM中单元状态和门数值的变化图,并用自己的话解释该图。
全面总结RNN(必做)
参考博客:
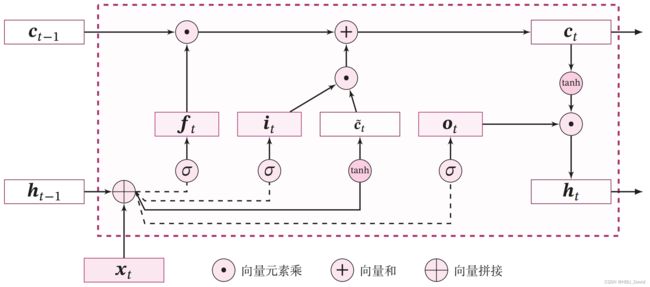
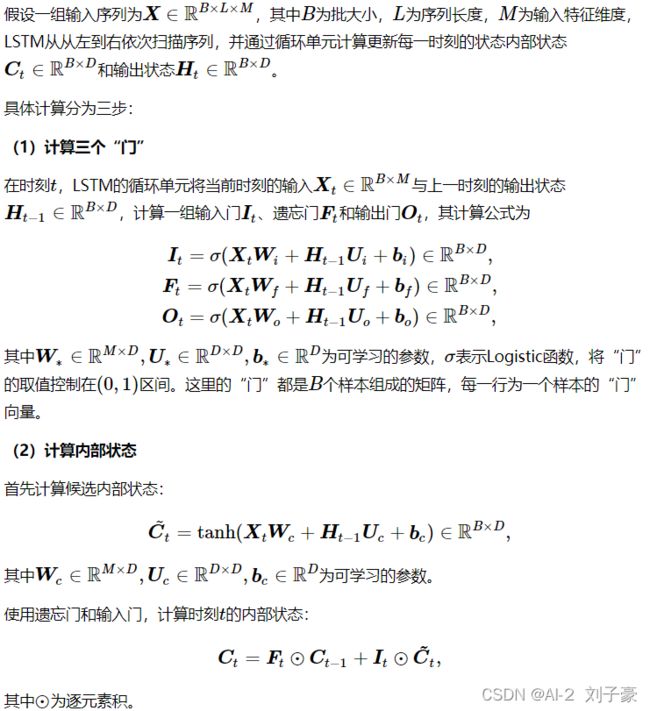
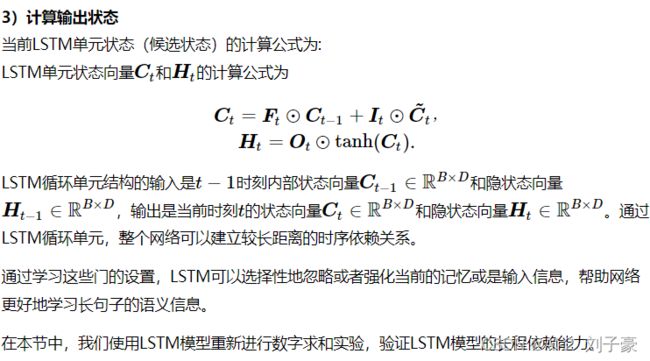
图6.10 LSTM网络的循环单元结构
提醒:为了和代码的实现保存一致性,这里使用形状为 (样本数量 × 序列长度 × 特征维度) 的张量来表示一组样本.
6.3.1 模型构建
在本实验中,我们将使用第6.1.2.4节中定义Model_RNN4SeqClass模型,并构建 LSTM 算子.只需要实例化 LSTM 算,并传入Model_RNN4SeqClass模型,就可以用 LSTM 进行数字求和实验
6.3.1.1 LSTM层
LSTM层的代码与SRN层结构相似,只是在SRN层的基础上增加了内部状态、输入门、遗忘门和输出门的定义和计算。这里LSTM层的输出也依然为序列的最后一个位置的隐状态向量。代码实现如下:
import torch.nn.functional as F
import torch
import torch.nn as nn
# 声明LSTM和相关参数
class LSTM(nn.Module):
def __init__(self, input_size, hidden_size, Wi_attr=None, Wf_attr=None, Wo_attr=None, Wc_attr=None,
Ui_attr=None, Uf_attr=None, Uo_attr=None, Uc_attr=None, bi_attr=None, bf_attr=None,
bo_attr=None, bc_attr=None):
super(LSTM, self).__init__()
self.input_size = input_size
self.hidden_size = hidden_size
# 初始化模型参数
if Wi_attr==None:
Wi= torch.zeros(size=[input_size, hidden_size], dtype=torch.float32)
else:
Wi = torch.tensor(Wi_attr, dtype=torch.float32)
self.W_i = torch.nn.Parameter(Wi)
if Wf_attr==None:
Wf=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32)
else:
Wf = torch.tensor(Wf_attr, dtype=torch.float32)
self.W_f = torch.nn.Parameter(Wf)
if Wo_attr==None:
Wo=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32)
else:
Wo = torch.tensor(Wo_attr, dtype=torch.float32)
self.W_o =torch.nn.Parameter(Wo)
if Wc_attr==None:
Wc=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32)
else:
Wc = torch.tensor(Wc_attr, dtype=torch.float32)
self.W_c = torch.nn.Parameter(Wc)
if Ui_attr==None:
Ui = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32)
else:
Ui = torch.tensor(Ui_attr, dtype=torch.float32)
self.U_i = torch.nn.Parameter(Ui)
if Uf_attr == None:
Uf = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32)
else:
Uf = torch.tensor(Uf_attr, dtype=torch.float32)
self.U_f = torch.nn.Parameter(Uf)
if Uo_attr == None:
Uo = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32)
else:
Uo = torch.tensor(Uo_attr, dtype=torch.float32)
self.U_o = torch.nn.Parameter(Uo)
if Uc_attr == None:
Uc = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32)
else:
Uc = torch.tensor(Uc_attr, dtype=torch.float32)
self.U_c = torch.nn.Parameter(Uc)
if bi_attr == None:
bi = torch.zeros(size=[1,hidden_size], dtype=torch.float32)
else:
bi = torch.tensor(bi_attr, dtype=torch.float32)
self.b_i = torch.nn.Parameter(bi)
if bf_attr == None:
bf = torch.zeros(size=[1,hidden_size], dtype=torch.float32)
else:
bf = torch.tensor(bf_attr, dtype=torch.float32)
self.b_f = torch.nn.Parameter(bf)
if bo_attr == None:
bo = torch.zeros(size=[1,hidden_size], dtype=torch.float32)
else:
bo = torch.tensor(bo_attr, dtype=torch.float32)
self.b_o = torch.nn.Parameter(bo)
if bc_attr == None:
bc = torch.zeros(size=[1,hidden_size], dtype=torch.float32)
else:
bc = torch.tensor(bc_attr, dtype=torch.float32)
self.b_c = torch.nn.Parameter(bc)
# 初始化状态向量和隐状态向量
def init_state(self, batch_size):
hidden_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32)
cell_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32)
return hidden_state, cell_state
# 定义前向计算
def forward(self, inputs, states=None):
# inputs: 输入数据,其shape为batch_size x seq_len x input_size
batch_size, seq_len, input_size = inputs.shape
# 初始化起始的单元状态和隐状态向量,其shape为batch_size x hidden_size
if states is None:
states = self.init_state(batch_size)
hidden_state, cell_state = states
# 执行LSTM计算,包括:输入门、遗忘门和输出门、候选内部状态、内部状态和隐状态向量
for step in range(seq_len):
# 获取当前时刻的输入数据step_input: 其shape为batch_size x input_size
step_input = inputs[:, step, :]
# 计算输入门, 遗忘门和输出门, 其shape为:batch_size x hidden_size
I_gate = F.sigmoid(torch.matmul(step_input, self.W_i) + torch.matmul(hidden_state, self.U_i) + self.b_i)
F_gate = F.sigmoid(torch.matmul(step_input, self.W_f) + torch.matmul(hidden_state, self.U_f) + self.b_f)
O_gate = F.sigmoid(torch.matmul(step_input, self.W_o) + torch.matmul(hidden_state, self.U_o) + self.b_o)
# 计算候选状态向量, 其shape为:batch_size x hidden_size
C_tilde = F.tanh(torch.matmul(step_input, self.W_c) + torch.matmul(hidden_state, self.U_c) + self.b_c)
# 计算单元状态向量, 其shape为:batch_size x hidden_size
cell_state = F_gate * cell_state + I_gate * C_tilde
# 计算隐状态向量,其shape为:batch_size x hidden_size
hidden_state = O_gate * F.tanh(cell_state)
return hidden_state
Wi_attr = [[0.1, 0.2], [0.1, 0.2]]
Wf_attr = [[0.1, 0.2], [0.1, 0.2]]
Wo_attr = [[0.1, 0.2], [0.1, 0.2]]
Wc_attr = [[0.1, 0.2], [0.1, 0.2]]
Ui_attr = [[0.0, 0.1], [0.1, 0.0]]
Uf_attr = [[0.0, 0.1], [0.1, 0.0]]
Uo_attr = [[0.0, 0.1], [0.1, 0.0]]
Uc_attr = [[0.0, 0.1], [0.1, 0.0]]
bi_attr = [[0.1, 0.1]]
bf_attr = [[0.1, 0.1]]
bo_attr = [[0.1, 0.1]]
bc_attr = [[0.1, 0.1]]
lstm = LSTM(2, 2, Wi_attr=Wi_attr, Wf_attr=Wf_attr, Wo_attr=Wo_attr, Wc_attr=Wc_attr,
Ui_attr=Ui_attr, Uf_attr=Uf_attr, Uo_attr=Uo_attr, Uc_attr=Uc_attr,
bi_attr=bi_attr, bf_attr=bf_attr, bo_attr=bo_attr, bc_attr=bc_attr)
inputs = torch.as_tensor([[[1, 0]]], dtype=torch.float32)
hidden_state = lstm(inputs)
print(hidden_state)
运行结果:
![]()
Torch框架已经内置了LSTM的API torch.nn.LSTM,其与自己实现的SRN不同点在于其实现时采用了两个偏置,同时矩阵相乘时参数在输入数据前面,如下公式所示:
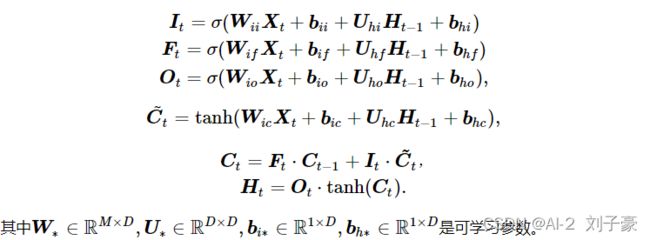
最后,Paddle内置LSTM API将会返回参数序列向量outputs和最后时刻的状态向量,其中序列向量outputs是指最后一层SRN的输出向量,其shape为[batch_size, seq_len, num_directions * hidden_size];最后时刻的状态向量是个元组,其包含了两个向量,分别是隐状态向量和单元状态向量,其shape均为[num_layers * num_directions, batch_size, hidden_size]。
这里我们可以将自己实现的SRN和Paddle框架内置的SRN返回的结果进行打印展示,实现代码如下。
# 这里创建一个随机数组作为测试数据,数据shape为batch_size x seq_len x input_size
batch_size, seq_len, input_size = 8, 20, 32
inputs = torch.randn(size=[batch_size, seq_len, input_size])
# 设置模型的hidden_size
hidden_size = 32
torch_lstm = nn.LSTM(input_size, hidden_size)
self_lstm = LSTM(input_size, hidden_size)
self_hidden_state = self_lstm(inputs)
torch_outputs, (torch_hidden_state, torch_cell_state) = torch_lstm(inputs)
print("self_lstm hidden_state: ", self_hidden_state.shape)
print("torch_lstm outpus:", torch_outputs.shape)
print("torch_lstm hidden_state:", torch_hidden_state.shape)
print("torch_lstm cell_state:", torch_cell_state.shape)
运行结果:
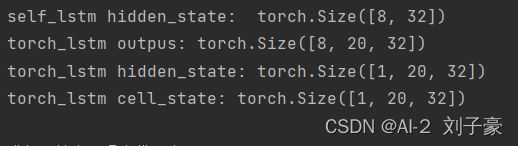
可以看到,自己实现的LSTM由于没有考虑多层因素,因此没有层次这个维度,因此其输出shape为[8, 32]。同时由于在以上代码使用Paddle内置API实例化LSTM时,默认定义的是1层的单向SRN,因此其shape为[1, 8, 32],同时隐状态向量为[8,20, 32].
接下来,我们可以将自己实现的LSTM与Torch内置的LSTM在输出值的精度上进行对比,这里首先根据Torch内置的LSTM实例化模型(为了进行对比,在实例化时只保留一个偏置,将偏置bihbih设置为0),然后提取该模型对应的参数,进行参数分割后,使用相应参数去初始化自己实现的LSTM,从而保证两者在参数初始化时是一致的。
在进行实验时,首先定义输入数据inputs,然后将该数据分别传入Torch内置的LSTM与自己实现的LSTM模型中,最后通过对比两者的隐状态输出向量。代码实现如下:
import torch
torch.seed()
# 这里创建一个随机数组作为测试数据,数据shape为batch_size x seq_len x input_size
batch_size, seq_len, input_size, hidden_size = 2, 5, 10, 10
inputs = torch.randn([batch_size, seq_len, input_size])
# 设置模型的hidden_size
torch_lstm = nn.LSTM(input_size, hidden_size, bias=True)
# 获取torch_lstm中的参数,并设置相应的paramAttr,用于初始化lstm
print(torch_lstm.weight_ih_l0.T.shape)
chunked_W = torch.split(torch_lstm.weight_ih_l0.T, split_size_or_sections=10, dim=-1)
chunked_U = torch.split(torch_lstm.weight_hh_l0.T, split_size_or_sections=10, dim=-1)
chunked_b = torch.split(torch_lstm.bias_hh_l0.T, split_size_or_sections=10, dim=-1)
Wi_attr = chunked_W[0]
Wf_attr = chunked_W[1]
Wc_attr = chunked_W[2]
Wo_attr = chunked_W[3]
Ui_attr = chunked_U[0]
Uf_attr = chunked_U[1]
Uc_attr = chunked_U[2]
Uo_attr = chunked_U[3]
bi_attr = chunked_b[0]
bf_attr = chunked_b[1]
bc_attr = chunked_b[2]
bo_attr = chunked_b[3]
self_lstm = LSTM(input_size, hidden_size, Wi_attr=Wi_attr, Wf_attr=Wf_attr, Wo_attr=Wo_attr, Wc_attr=Wc_attr,
Ui_attr=Ui_attr, Uf_attr=Uf_attr, Uo_attr=Uo_attr, Uc_attr=Uc_attr,
bi_attr=bi_attr, bf_attr=bf_attr, bo_attr=bo_attr, bc_attr=bc_attr)
# 进行前向计算,获取隐状态向量,并打印展示
self_hidden_state = self_lstm(inputs)
torch_outputs, (torch_hidden_state, _) = torch_lstm(inputs)
print("torch SRN:\n", torch_hidden_state.detach().numpy().squeeze(0))
print("self SRN:\n", self_hidden_state.detach().numpy())
运行结果:
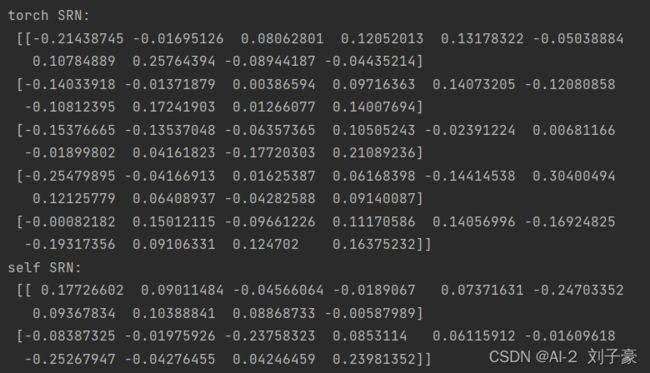
可以看到,两者的输出基本是一致的。另外,还可以进行对比两者在运算速度方面的差异。代码实现如下:
import time
# 这里创建一个随机数组作为测试数据,数据shape为batch_size x seq_len x input_size
batch_size, seq_len, input_size = 8, 20, 32
inputs = torch.randn([batch_size, seq_len, input_size])
# 设置模型的hidden_size
hidden_size = 32
self_lstm = LSTM(input_size, hidden_size)
torch_lstm = nn.LSTM(input_size, hidden_size)
# 计算自己实现的SRN运算速度
model_time = 0
for i in range(100):
strat_time = time.time()
hidden_state = self_lstm(inputs)
# 预热10次运算,不计入最终速度统计
if i < 10:
continue
end_time = time.time()
model_time += (end_time - strat_time)
avg_model_time = model_time / 90
print('self_lstm speed:', avg_model_time, 's')
# 计算torch内置的SRN运算速度
model_time = 0
for i in range(100):
strat_time = time.time()
outputs, (hidden_state, cell_state) = torch_lstm(inputs)
# 预热10次运算,不计入最终速度统计
if i < 10:
continue
end_time = time.time()
model_time += (end_time - strat_time)
avg_model_time = model_time / 90
print('torch_lstm speed:', avg_model_time, 's')
运行结果:
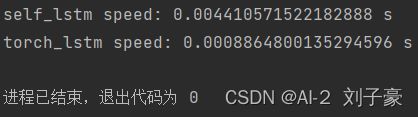
可以看到,由于Torch框架的LSTM底层采用了C++实现并进行优化,Torch框架内置的LSTM运行效率远远高于自己实现的LSTM。
6.3.1.2 模型汇总
在本节实验中,我们将使用6.1.2.4的Model_RNN4SeqClass作为预测模型,不同在于在实例化时将传入实例化的LSTM层。
6.3.2 模型训练
6.3.2.1 训练指定长度的数字预测模型
本节将基于RunnerV3类进行训练,首先定义模型训练的超参数,并保证和简单循环网络的超参数一致. 然后定义一个train函数,其可以通过指定长度的数据集,并进行训练. 在train函数中,首先加载长度为length的数据,然后实例化各项组件并创建对应的Runner,然后训练该Runner。同时在本节将使用4.5.4节定义的准确度(Accuracy)作为评估指标,代码实现如下:
import os
import random
import torch
import numpy as np
# 训练轮次
num_epochs = 500
# 学习率
lr = 0.001
# 输入数字的类别数
num_digits = 10
# 将数字映射为向量的维度
input_size = 32
# 隐状态向量的维度
hidden_size = 32
# 预测数字的类别数
num_classes = 19
# 批大小
batch_size = 8
# 模型保存目录
save_dir = "./checkpoints"
# 可以设置不同的length进行不同长度数据的预测实验
def train(length):
print(f"\n====> Training LSTM with data of length {length}.")
np.random.seed(0)
random.seed(0)
# 加载长度为length的数据
data_path = f"./datasets/{length}"
train_examples, dev_examples, test_examples = load_data(data_path)
train_set, dev_set, test_set = DigitSumDataset(train_examples), DigitSumDataset(dev_examples), DigitSumDataset(test_examples)
train_loader = DataLoader(train_set, batch_size=batch_size)
dev_loader = DataLoader(dev_set, batch_size=batch_size)
test_loader = DataLoader(test_set, batch_size=batch_size)
# 实例化模型
base_model = LSTM(input_size, hidden_size)
model = Model_RNN4SeqClass(base_model, num_digits, input_size, hidden_size, num_classes)
# 指定优化器
optimizer = torch.optim.Adam(lr=lr, params=model.parameters())
# 定义评价指标
metric = Accuracy()
# 定义损失函数
loss_fn = torch.nn.CrossEntropyLoss()
# 基于以上组件,实例化Runner
runner = RunnerV3(model, optimizer, loss_fn, metric)
# 进行模型训练
model_save_path = os.path.join(save_dir, f"best_lstm_model_{length}.pdparams")
runner.train(train_loader, dev_loader, num_epochs=num_epochs, eval_steps=100, log_steps=100, save_path=model_save_path)
return runner6.3.2.2 多组训练
接下来,分别进行数据长度为10, 15, 20, 25, 30, 35的数字预测模型训练实验,训练后的runner保存至runners字典中。
lstm_runners = {}
lengths = [10, 15, 20, 25, 30, 35]
for length in lengths:
runner = train(length)
lstm_runners[length] = runner运行结果:
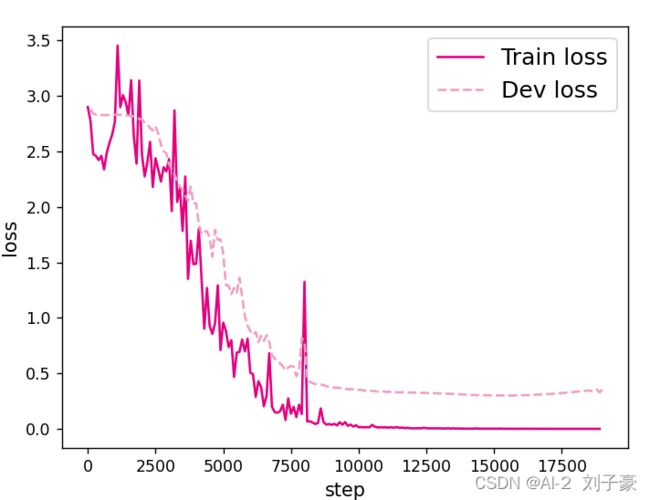
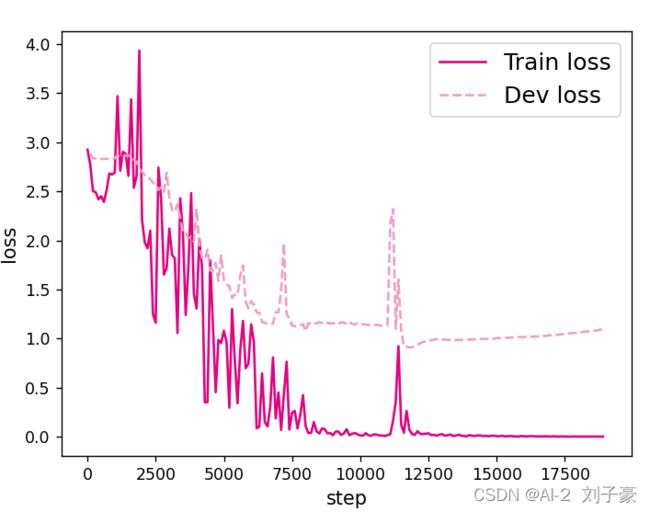
6.3.2.3 损失曲线展示
分别画出基于LSTM的各个长度的数字预测模型训练过程中,在训练集和验证集上的损失曲线,代码实现如下:
# 画出训练过程中的损失图
for length in lengths:
runner = lstm_runners[length]
fig_name = f"./images/6.11_{length}.pdf"
plot_training_loss(runner, fig_name, sample_step=100)
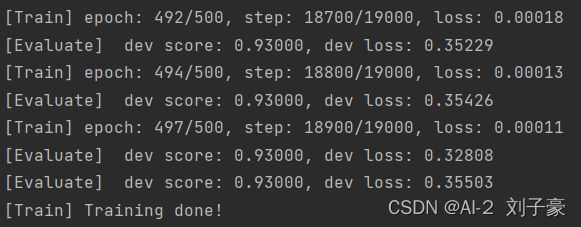
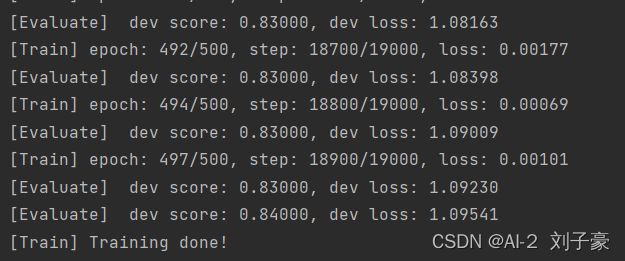
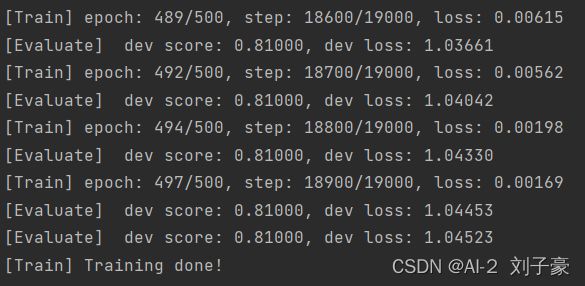
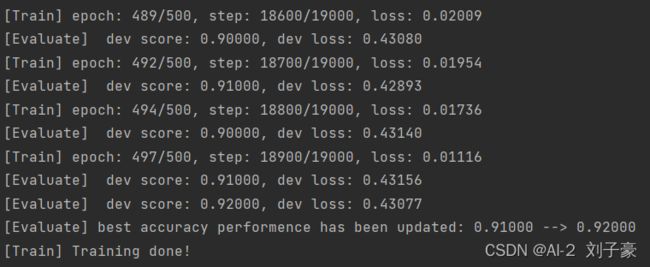
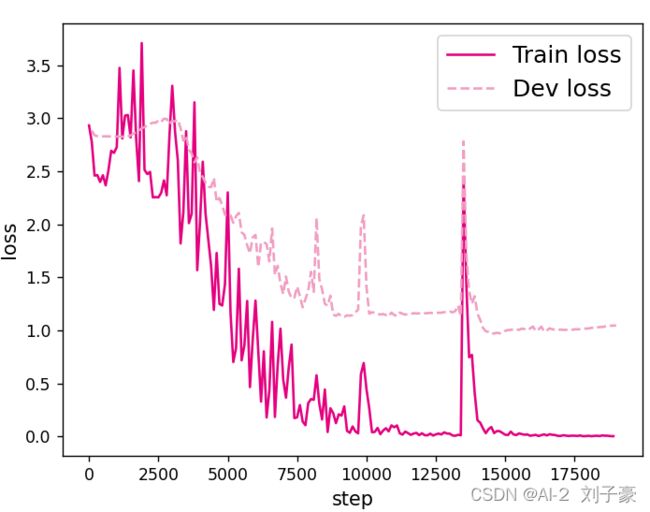
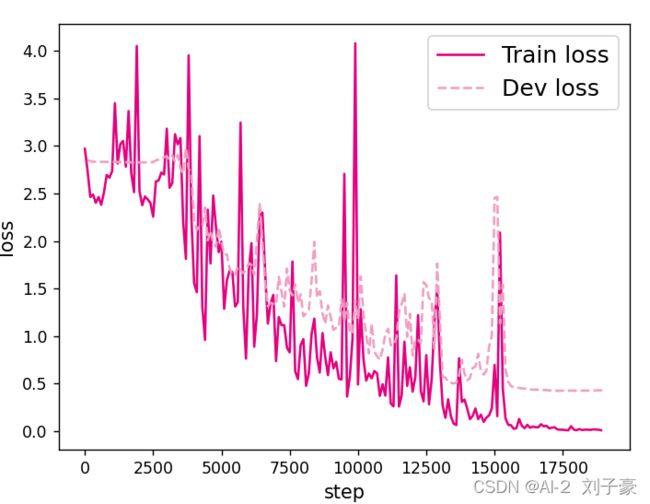
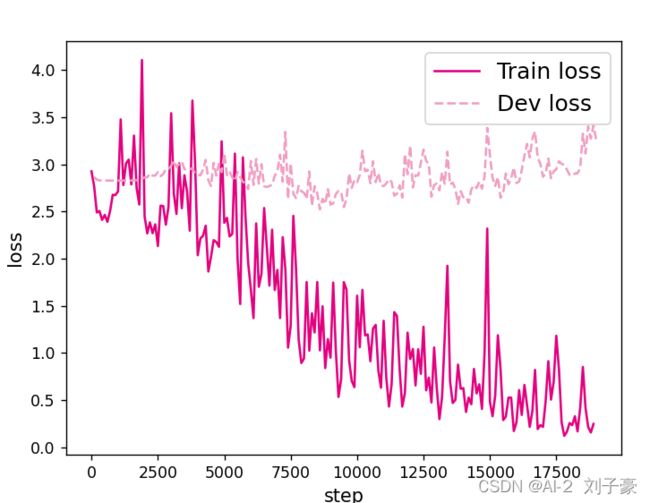
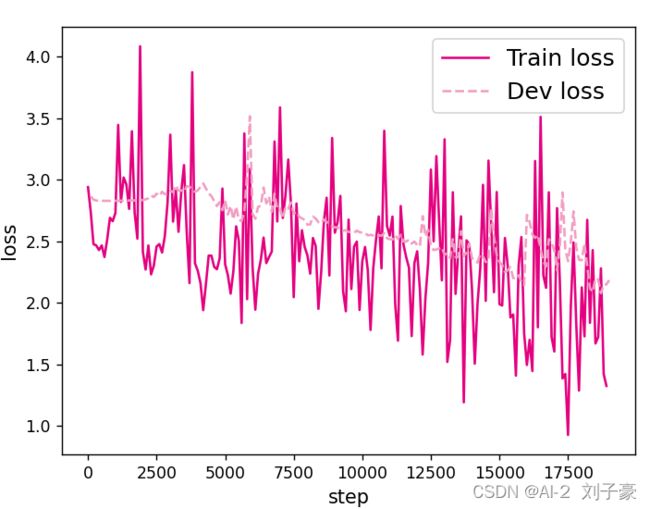
图6.11展示了LSTM模型在不同长度数据集上进行训练后的损失变化,同SRN模型一样,随着序列长度的增加,训练集上的损失逐渐不稳定,验证集上的损失整体趋向于变大,这说明当序列长度增加时,保持长期依赖的能力同样在逐渐变弱. 同图6.5相比,LSTM模型在序列长度增加时,收敛情况比SRN模型更好。
【思考题1】LSTM与SRN实验结果对比,谈谈看法。(选做)
LSTM在序列长度较短以及较长时,准确率优于SRN(从测试集损失和训练集损失可以看出)。LSTM在序列长度较长时,比SRM收敛更稳定。本身LSTM的设计就是通过门控机制来解决SRN的长程依赖问题,即随着训练时间的加长以及网络层数的增多,很容易出现梯度爆炸或梯度消失,导致无法处理较长序列数据,从而无法获取长距离数据的信息。
6.3.3 模型评价
6.3.3.1 在测试集上进行模型评价
使用测试数据对在训练过程中保存的最好模型进行评价,观察模型在测试集上的准确率. 同时获取模型在训练过程中在验证集上最好的准确率,实现代码如下:
lstm_dev_scores = []
lstm_test_scores = []
for length in lengths:
print(f"Evaluate LSTM with data length {length}.")
runner = lstm_runners[length]
# 加载训练过程中效果最好的模型
model_path = os.path.join(save_dir, f"best_lstm_model_{length}.pdparams")
runner.load_model(model_path)
# 加载长度为length的数据
data_path = f"./datasets/{length}"
train_examples, dev_examples, test_examples = load_data(data_path)
test_set = DigitSumDataset(test_examples)
test_loader = DataLoader(test_set, batch_size=batch_size)
# 使用测试集评价模型,获取测试集上的预测准确率
score, _ = runner.evaluate(test_loader)
lstm_test_scores.append(score)
lstm_dev_scores.append(max(runner.dev_scores))
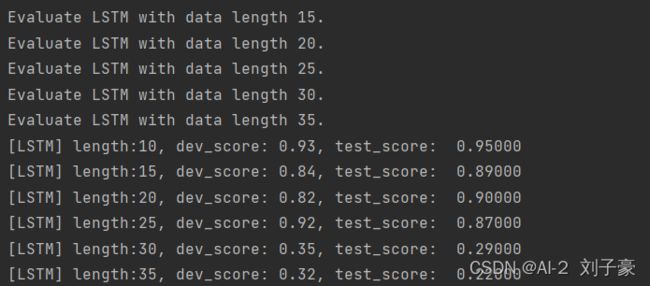
for length, dev_score, test_score in zip(lengths, lstm_dev_scores, lstm_test_scores):
print(f"[LSTM] length:{length}, dev_score: {dev_score}, test_score: {test_score: .5f}")
运行结果:
 6.3.3.2 模型在不同长度的数据集上的准确率变化图
6.3.3.2 模型在不同长度的数据集上的准确率变化图
接下来,将SRN和LSTM在不同长度的验证集和测试集数据上的准确率绘制成图片,以方面观察。
import matplotlib.pyplot as plt
plt.plot(lengths, lstm_dev_scores, '-o', color='#e8609b', label="LSTM Dev Accuracy")
plt.plot(lengths, lstm_test_scores,'-o', color='#000000', label="LSTM Test Accuracy")
#绘制坐标轴和图例
plt.ylabel("accuracy", fontsize='large')
plt.xlabel("sequence length", fontsize='large')
plt.legend(loc='lower left', fontsize='x-large')
fig_name = "./images/6.12.pdf"
plt.savefig(fig_name)
plt.show()
图6.12 展示了LSTM模型与SRN模型在不同长度数据集上的准确度对比。随着数据集长度的增加,LSTM模型在验证集和测试集上的准确率整体也趋向于降低;同时LSTM模型的准确率显著高于SRN模型,表明LSTM模型保持长期依赖的能力要优于SRN模型.
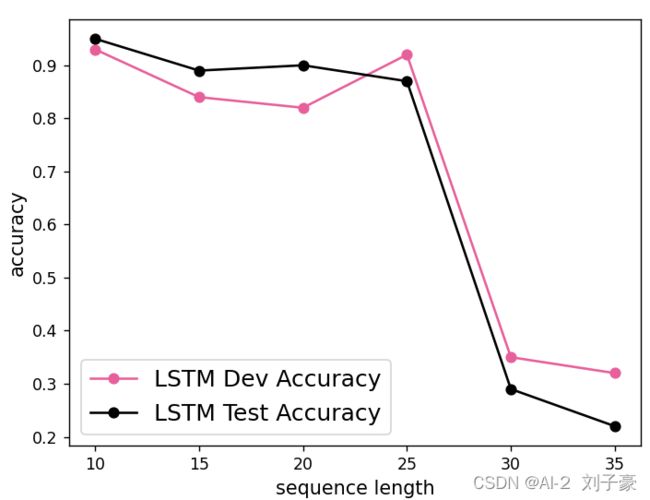
图6.12 LSTM与SRN网络在不同长度数据集上的准确度对比图
【思考题2】LSTM与SRN在不同长度数据集上的准确度对比,谈谈看法。(选做)
LSTM模型与SRN模型在不同长度数据集上的准确度对比。随着数据集长度的增加,LSTM模型在验证集和测试集上的准确率整体也趋向于降低;同时LSTM模型的准确率显著高于SRN模型,表明LSTM模型保持长期依赖的能力要优于SRN模型.
6.3.3.3 LSTM模型门状态和单元状态的变化
LSTM模型通过门控机制控制信息的单元状态的更新,这里可以观察当LSTM在处理一条数字序列的时候,相应门和单元状态是如何变化的。首先需要对以上LSTM模型实现代码中,定义相应列表进行存储这些门和单元状态在每个时刻的向量。
# 声明LSTM和相关参数
class LSTM(nn.Module):
def __init__(self, input_size, hidden_size, Wi_attr=None, Wf_attr=None, Wo_attr=None, Wc_attr=None,
Ui_attr=None, Uf_attr=None, Uo_attr=None, Uc_attr=None, bi_attr=None, bf_attr=None,
bo_attr=None, bc_attr=None):
super(LSTM, self).__init__()
self.input_size = input_size
self.hidden_size = hidden_size
# 初始化模型参数
if Wi_attr==None:
Wi=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32)
else:
Wi = torch.tensor(Wi_attr, dtype=torch.float32)
self.W_i = torch.nn.Parameter(Wi)
if Wf_attr==None:
Wf=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32)
else:
Wf = torch.tensor(Wf_attr, dtype=torch.float32)
self.W_f = torch.nn.Parameter(Wf)
if Wo_attr==None:
Wo=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32)
else:
Wo = torch.tensor(Wo_attr, dtype=torch.float32)
self.W_o =torch.nn.Parameter(Wo)
if Wc_attr==None:
Wc=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32)
else:
Wc = torch.tensor(Wc_attr, dtype=torch.float32)
self.W_c = torch.nn.Parameter(Wc)
if Ui_attr==None:
Ui = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32)
else:
Ui = torch.tensor(Ui_attr, dtype=torch.float32)
self.U_i = torch.nn.Parameter(Ui)
if Uf_attr == None:
Uf = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32)
else:
Uf = torch.tensor(Uf_attr, dtype=torch.float32)
self.U_f = torch.nn.Parameter(Uf)
if Uo_attr == None:
Uo = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32)
else:
Uo = torch.tensor(Uo_attr, dtype=torch.float32)
self.U_o = torch.nn.Parameter(Uo)
if Uc_attr == None:
Uc = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32)
else:
Uc = torch.tensor(Uc_attr, dtype=torch.float32)
self.U_c = torch.nn.Parameter(Uc)
if bi_attr == None:
bi = torch.zeros(size=[1,hidden_size], dtype=torch.float32)
else:
bi = torch.tensor(bi_attr, dtype=torch.float32)
self.b_i = torch.nn.Parameter(bi)
if bf_attr == None:
bf = torch.zeros(size=[1,hidden_size], dtype=torch.float32)
else:
bf = torch.tensor(bf_attr, dtype=torch.float32)
self.b_f = torch.nn.Parameter(bf)
if bo_attr == None:
bo = torch.zeros(size=[1,hidden_size], dtype=torch.float32)
else:
bo = torch.tensor(bo_attr, dtype=torch.float32)
self.b_o = torch.nn.Parameter(bo)
if bc_attr == None:
bc = torch.zeros(size=[1,hidden_size], dtype=torch.float32)
else:
bc = torch.tensor(bc_attr, dtype=torch.float32)
self.b_c = torch.nn.Parameter(bc)
# 初始化状态向量和隐状态向量
def init_state(self, batch_size):
hidden_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32)
cell_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32)
return hidden_state, cell_state
# 定义前向计算
def forward(self, inputs, states=None):
# inputs: 输入数据,其shape为batch_size x seq_len x input_size
batch_size, seq_len, input_size = inputs.shape
# 初始化起始的单元状态和隐状态向量,其shape为batch_size x hidden_size
if states is None:
states = self.init_state(batch_size)
hidden_state, cell_state = states
# 定义相应的门状态和单元状态向量列表
self.Is = []
self.Fs = []
self.Os = []
self.Cs = []
# 初始化状态向量和隐状态向量
cell_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32)
hidden_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32)
# 执行LSTM计算,包括:隐藏门、输入门、遗忘门、候选状态向量、状态向量和隐状态向量
for step in range(seq_len):
input_step = inputs[:, step, :]
I_gate = F.sigmoid(torch.matmul(input_step, self.W_i) + torch.matmul(hidden_state, self.U_i) + self.b_i)
F_gate = F.sigmoid(torch.matmul(input_step, self.W_f) + torch.matmul(hidden_state, self.U_f) + self.b_f)
O_gate = F.sigmoid(torch.matmul(input_step, self.W_o) + torch.matmul(hidden_state, self.U_o) + self.b_o)
C_tilde = F.tanh(torch.matmul(input_step, self.W_c) + torch.matmul(hidden_state, self.U_c) + self.b_c)
cell_state = F_gate * cell_state + I_gate * C_tilde
hidden_state = O_gate * F.tanh(cell_state)
# 存储门状态向量和单元状态向量
self.Is.append(I_gate.detach().numpy().copy())
self.Fs.append(F_gate.detach().numpy().copy())
self.Os.append(O_gate.detach().numpy().copy())
self.Cs.append(cell_state.detach().numpy().copy())
return hidden_state
接下来,需要使用新的LSTM模型,重新实例化一个runner,本节使用序列长度为10的模型进行此项实验,因此需要加载序列长度为10的模型。
# 实例化模型
base_model = LSTM(input_size, hidden_size)
model = Model_RNN4SeqClass(base_model, num_digits, input_size, hidden_size, num_classes)
# 指定优化器
optimizer = torch.optim.Adam(lr=lr, params=model.parameters())
# 定义评价指标
metric = Accuracy()
# 定义损失函数
loss_fn = torch.nn.CrossEntropyLoss()
# 基于以上组件,重新实例化Runner
runner = RunnerV3(model, optimizer, loss_fn, metric)
length = 10
# 加载训练过程中效果最好的模型
model_path = os.path.join(save_dir, f"best_lstm_model_{length}.pdparams")
runner.load_model(model_path)
接下来,给定一条数字序列,并使用数字预测模型进行数字预测,这样便会将相应的门状态和单元状态向量保存至模型中. 然后分别从模型中取出这些向量,并将这些向量进行绘制展示。代码实现如下:
import seaborn as sns
import matplotlib.pyplot as plt
def plot_tensor(inputs, tensor, save_path, vmin=0, vmax=1):
tensor = np.stack(tensor, axis=0)
tensor = np.squeeze(tensor, 1).T
plt.figure(figsize=(16,6))
# vmin, vmax定义了色彩图的上下界
ax = sns.heatmap(tensor, vmin=vmin, vmax=vmax)
ax.set_xticklabels(inputs)
ax.figure.savefig(save_path)
# 定义模型输入
inputs = [6, 7, 0, 0, 1, 0, 0, 0, 0, 0]
X = torch.as_tensor(inputs.copy())
X = X.unsqueeze(0)
# 进行模型预测,并获取相应的预测结果
logits = runner.predict(X)
predict_label = torch.argmax(logits, dim=-1)
print(f"predict result: {predict_label.numpy()[0]}")
# 输入门
Is = runner.model.rnn_model.Is
plot_tensor(inputs, Is, save_path="./images/6.13_I.pdf")
# 遗忘门
Fs = runner.model.rnn_model.Fs
plot_tensor(inputs, Fs, save_path="./images/6.13_F.pdf")
# 输出门
Os = runner.model.rnn_model.Os
plot_tensor(inputs, Os, save_path="./images/6.13_O.pdf")
# 单元状态
Cs = runner.model.rnn_model.Cs
plot_tensor(inputs, Cs, save_path="./images/6.13_C.pdf", vmin=-5, vmax=5)
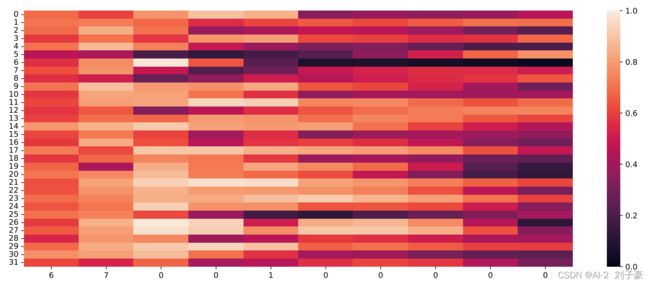
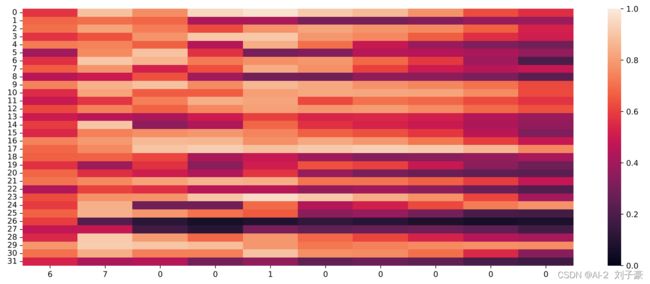
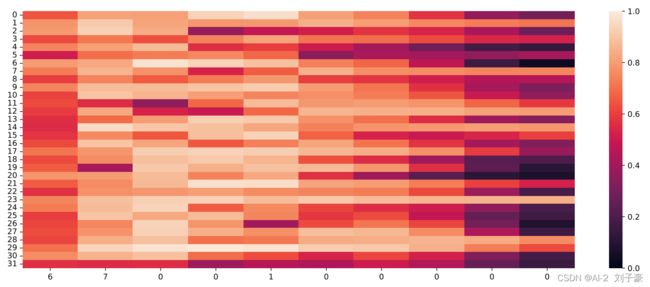
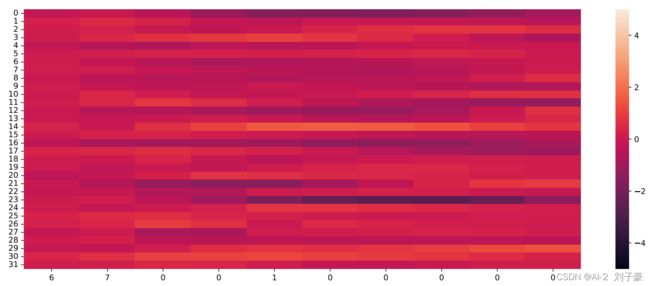
图6.13 当LSTM处理序列数据[6, 7, 0, 0, 1, 0, 0, 0, 0, 0]的过程中单元状态和门数值的变化图,其中横坐标为输入数字,纵坐标为相应门或单元状态向量的维度,颜色的深浅代表数值的大小。可以看到,当输入门遇到不同位置的数字0时,保持了相对一致的数值大小,表明对于0元素保持相同的门控过滤机制,避免输入信息的变化给当前模型带来困扰;当遗忘门遇到数字1后,遗忘门数值在一些维度上变小,表明对某些信息进行了遗忘;随着序列的输入,输出门和单元状态在某些维度上数值变小,在某些维度上数值变大,表明输出门在根据信息的重要性选择信息进行输出,同时单元状态也在保持着对文本预测重要的一些信息.
输入门:
遗忘门:
输出门:
单元状态:
【思考题3】分析LSTM中单元状态和门数值的变化图,并用自己的话解释该图。
当LSTM处理序列数据[6, 7, 0, 0, 1, 0, 0, 0, 0, 0]的过程中单元状态和门数值的变化图,其中横坐标为输入数字,纵坐标为相应门或单元状态向量的维度,颜色的深浅代表数值的大小。可以看到,当输入门遇到不同位置的数字0时,保持了相对一致的数值大小,表明对于0元素保持相同的门控过滤机制,避免输入信息的变化给当前模型带来困扰;当遗忘门遇到数字1后,遗忘门数值在一些维度上变小,表明对某些信息进行了遗忘;随着序列的输入,输出门和单元状态在某些维度上数值变小,在某些维度上数值变大,表明输出门在根据信息的重要性选择信息进行输出,同时单元状态也在保持着对文本预测重要的一些信息.
全面总结RNN(必做)
参考博客:
1. NNDL 实验七 循环神经网络(1)RNN记忆能力实验
2. NNDL 实验6(上) - HBU_DAVID - 博客园 (cnblogs.com)
3. NNDL 实验6(下) - HBU_DAVID - 博客园 (cnblogs.com)
4. 循环神经网络 — 动手学深度学习 2.0.0-beta1 documentation (d2l.ai)
5. 现代循环神经网络 — 动手学深度学习 2.0.0-beta1 documentation (d2l.ai)