RANSAC与圆柱拟合
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写。它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概率得出一个合理的结果;为了提高概率必须提高迭代次数。该算法最早由Fischler和Bolles于1981年提出。
RANSAC的基本假设是:
(1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
(2)“局外点”是不能适应该模型的数据;
(3)除此之外的数据属于噪声。 局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设。
RANSAC也做了以下假设:给定一组(通常很小的)局内点,存在一个可以估计模型参数的过程;而该模型能够解释或者适用于局内点。
一、RANSAC理论介绍
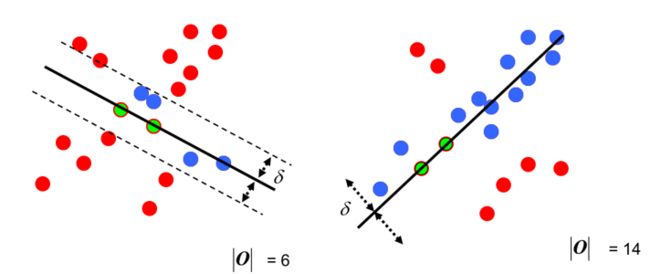
普通最小二乘是保守派:在现有数据下,如何实现最优。是从一个整体误差最小的角度去考虑,尽量谁也不得罪。
RANSAC是改革派:首先假设数据具有某种特性(目的),为了达到目的,适当割舍一些现有的数据。
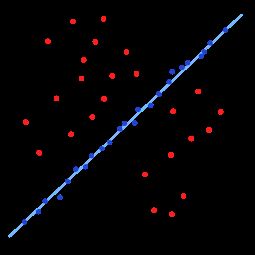
给出最小二乘拟合(红线)、RANSAC(绿线)对于一阶直线、二阶曲线的拟合对比:

可以看到RANSAC可以很好的拟合。RANSAC可以理解为一种采样的方式,所以对于多项式拟合、混合高斯模型(GMM)等理论上都是适用的。
一个简单的例子如下:简单的最小二乘法不能找到适应于局内点的直线,原因是最小二乘法尽量去适应包括局外点在内的所有点。相反,RANSAC能得出一个仅仅用局内点计算出模型,并且概率还足够高。但是,RANSAC并不能保证结果一定正确,为了保证算法有足够高的合理概率,我们必须小心的选择算法的参数。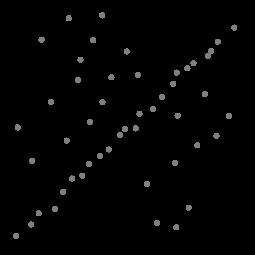
二、概述
RANSAC算法的输入是一组观测数据,一个可以解释或者适应于观测数据的参数化模型,一些可信的参数。
RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后,用所有假设的局内点去重新估计模型,因为它仅仅被初始的假设局内点估计过。
5.最后,通过估计局内点与模型的错误率来评估模型。
这个过程被重复执行固定的次数,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。
三、算法
输入:
data —— 一组观测数据
model —— 适应于数据的模型
n —— 适用于模型的最少数据个数
k —— 算法的迭代次数
t —— 用于决定数据是否适应于模型的阀值
d —— 判定模型是否适用于数据集的数据数目
输出:
best_model —— 跟数据最匹配的模型参数(如果没有找到好的模型,返回null)
best_consensus_set —— 估计出模型的数据点
best_error —— 跟数据相关的估计出的模型错误
iterations = 0
best_model = null
best_consensus_set = null
best_error = 无穷大
while ( iterations < k )
maybe_inliers = 从数据集中随机选择n个点
maybe_model = 适合于maybe_inliers的模型参数
consensus_set局内点 = maybe_inliers
for ( 每个数据集中不属于maybe_inliers的点 )
if ( 如果点适合于maybe_model,且错误小于t )
将点添加到consensus_set局内点
if ( consensus_set中的元素数目大于d )
已经找到了好的模型,现在测试该模型到底有多好
better_model = 用所有consensus_set拟合得到模型参数
this_error = better_model计算该模型的拟合误差(就是cost,一般直接采用每个点的误差相加求和作为总cost)改进它就会变成MSAC
if ( this_error < best_error )
我们发现了比以前好的模型,保存该模型直到更好的模型出现
best_model = better_model
best_consensus_set = consensus_set
best_error = this_error
增加迭代次数
返回 best_model, best_consensus_set, best_error
from:https://www.cnblogs.com/xrwang/archive/2011/03/09/ransac-1.html
四、RANSAC简化版流程实例:
第一步:假定模型(如直线方程),并随机抽取Nums个(以2个为例)样本点,对模型进行拟合:
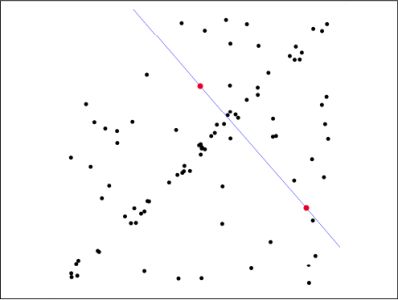
第二步:由于不是严格线性,数据点都有一定波动,假设容差范围为:sigma,找出距离拟合曲线容差范围内的点,并统计点的个数:
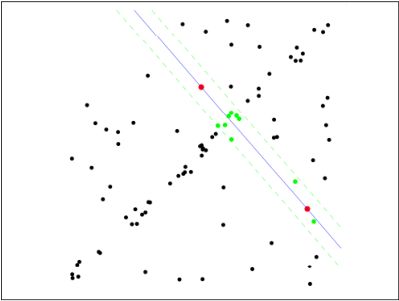
第三步:重新随机选取Nums个点,重复第一步~第二步的操作,直到结束迭代:

第四步:每一次拟合后,容差范围内都有对应的数据点数,找出数据点个数最多的情况,就是最终的拟合结果:
其实RANSAC忽略了几个问题:
- 每一次随机样本数Nums的选取:如二次曲线最少需要3个点确定,一般来说,Nums少一些易得出较优结果;
- 抽样迭代次数Iter的选取:即重复多少次抽取,就认为是符合要求从而停止运算?太多计算量大,太少性能可能不够理想;
- 容差Sigma的选取:sigma取大取小,对最终结果影响较大;
RANSAC的作用有点类似:将数据一切两段,一部分是自己人,一部分是敌人,自己人留下商量事,敌人赶出去。RANSAC开的是家庭会议,不像最小二乘总是开全体会议。
from:https://www.cnblogs.com/xingshansi/p/6763668.html
五、优点与缺点
RANSAC的优点是它能鲁棒的估计模型参数。例如,它能从包含大量局外点的数据集中估计出高精度的参数。RANSAC的缺点是它计算参数的迭代次数没有上限;如果设置迭代次数的上限,得到的结果可能不是最优的结果,甚至可能得到错误的结果。RANSAC只有一定的概率得到可信的模型,概率与迭代次数成正比。RANSAC的另一个缺点是它要求设置跟问题相关的阀值。
RANSAC只能从特定的数据集中估计出一个模型,如果存在两个(或多个)模型,RANSAC不能找到别的模型。
六、改进RANSAC——MSAC
RANSAC与MSAC唯一的区别在于cost的计算方式。RANSAC对于阈值(Tolerance)选取过于敏感,这个值过大了算法就无效了,过小的话算法会变得很不稳定。而MSAC可以做到部分补偿这些负面影响。
RANSAC的cost算法伪代码:
count = 局内点个数
cost = 0
For (n=0; n对于每个局内点,计算它与拟合模型的误差,误差小于Tolerance,将误差值视为cost;误差大于Tolerance,则将“1”设为cost;将所有局内点的cost相加作为总cost。
MSAC的cost算法伪代码:
count = 局内点个数
cost = 0
For (n=0; n对于每个局内点,计算它与拟合模型的误差,误差小于Tolerance,将误差值视为cost;误差大于Tolerance,则将Tolerance设为cost;将所有局内点的cost相加作为总cost。
from:https://blog.csdn.net/weixin_44558898/article/details/88986497
在MATLAB中:
% Evaluate model with truncated loss评估具有截断损失
dis = evalFunc(modelParams, allPoints);
dis(dis > threshold) = threshold;
accDis = sum(dis);补充:三维RANSAC
matlab2018中的ransac源码:
% Load and plot a set of noisy 2D points.
% load 'pointsForLineFitting.mat';
% plot(points(:,1), points(:,2), '*');
% hold on
%
% % Fit a line using linear least squares.
% modelLeastSquares = polyfit(points(:,1), points(:,2), 1);
% x = [min(points(:,1)), max(points(:,1))];
% y = modelLeastSquares(1)*x + modelLeastSquares(2);
% plot(x, y, 'r-');
%
% % Fit a line to the points using M-estimator SAmple Consensus algorithm.
% sampleSize = 2;
% maxDistance = 2;
% fitLineFcn = @(points) polyfit(points(:,1), points(:,2), 1);
% evalLineFcn = ...
% @(model, points) sum((points(:, 2) - polyval(model, points(:,1))).^2, 2);
%
% [modelRANSAC, inlierIdx] = RANSAC(points, fitLineFcn, evalLineFcn, ...
% sampleSize, maxDistance);
%
% % Re-fit a line to the inliers.
% modelInliers = polyfit(points(inlierIdx,1), points(inlierIdx,2), 1);
%
% % Display the line.
% inlierPts = points(inlierIdx, :);
% x = [min(inlierPts(:,1)); max(inlierPts(:,1))];
% y = modelInliers(1)*x + modelInliers(2);
% plot(x, y, 'g-');
% legend('Noisy Points', 'Least Squares Fit', 'Robust Fit');
% hold off1、空间直线:已知两个点即可确定一条直线:
点向式:(x-x0)/u =(y-y0)/v=(z-z0) /w ,过点(x0,y0,z0) ,且有方向向量(u,v,w)。
设空间一点为P(x0,y0,z0),在直线上找一点Q(x1,y1,z1),直线的方向向量为:S=(l,m,n),则d=|PQ叉乘S|/|S|,
理由:|PQ叉乘S|为一平行四边形的面积,|S|为其一边.故=|PQ叉乘S|/|S|为平行四边形的高.即为点到直线的距离。
2、空间平面:三个不在一条直线上的点确定一个平面
Ax+By+Cz+D=0,即ax+by+cz+1=0
四个未知数求出三个就够啦,这三个未知数都可以用第四个未知数来表示,假设第四个未知数是D.则求出来的三个未知数一般是:A=a*D;B=b*D;C=c*D;(D不等于0),最终有a*Dx+b*Dy+cDz+D=0,等式两边同除以D,得平面方程ax+by+cz+1=0;
将已知三个点的坐标分别用P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3)表示。
设通过P1,P2,P3三点的平面方程为:Ax + By + Cz + D = 0。将P1(x1,y1,z1)点数值代入方程Ax + By + Cz + D = 0。
即可得到:Ax1 + By 1+ Cz1 + D = 0。化简得D = -(A * x1 + B * y1 + C * z1)。
则可以根据P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3)三点坐标分别求得A、B、C的值,如下:
A = (y3 - y1)*(z3 - z1) - (z2 -z1)*(y2 - y1);
B = (x3 - x1)*(z2 - z1) - (x2 - x1)*(z3 - z1);
C = (x2 - x1)*(y3 - y1) - (x3 - x1)*(y2 - y1);
又D = -(A * x1 + B * y1 + C * z1),所以可以求得D的值。
利用RANSAC拟合平面:
clc;clear all;close all;
%%%三维平面拟合
%%%生成随机数据
%内点
mu=[0 0 0]; %均值
S=[2 0 4;0 4 0;4 0 8]; %协方差
data1=mvnrnd(mu,S,300); %产生200个高斯分布数据
%外点
mu=[2 2 2];
S=[8 1 4;1 8 2;4 2 8]; %协方差
data2=mvnrnd(mu,S,100); %产生100个噪声数据
%合并数据
data=[data1',data2'];
iter = 1000;
%%% 绘制数据点
figure;plot3(data(1,:),data(2,:),data(3,:),'o');hold on; % 显示数据点
number = size(data,2); % 总点数
bestParameter1=0; bestParameter2=0; bestParameter3=0; % 最佳匹配的参数
sigma = 1;
pretotal=0; %符合拟合模型的数据的个数
for i=1:iter
%%% 随机选择三个点
idx = randperm(number,3);
sample = data(:,idx);
%%%拟合直线方程 z=ax+by+c
plane = zeros(1,3);
x = sample(:, 1);
y = sample(:, 2);
z = sample(:, 3);
a = ((z(1)-z(2))*(y(1)-y(3)) - (z(1)-z(3))*(y(1)-y(2)))/((x(1)-x(2))*(y(1)-y(3)) - (x(1)-x(3))*(y(1)-y(2)));
b = ((z(1) - z(3)) - a * (x(1) - x(3)))/(y(1)-y(3));
c = z(1) - a * x(1) - b * y(1);
plane = [a b -1 c]
mask=abs(plane*[data; ones(1,size(data,2))]); %求每个数据到拟合平面的距离
total=sum(maskpretotal %找到符合拟合平面数据最多的拟合平面
pretotal=total;
bestplane=plane; %找到最好的拟合平面
end
end
%显示符合最佳拟合的数据
mask=abs(bestplane*[data; ones(1,size(data,2))]) 在编程中,我们知道三个空间点之后,可以用 [uu, dd, vv] = svd(A); plane = vv(:,end); plane = plane ./ plane(end); plane = plane';来快速求解法向量,确定一个空间平面。
from:https://blog.csdn.net/u010128736/article/details/53422070
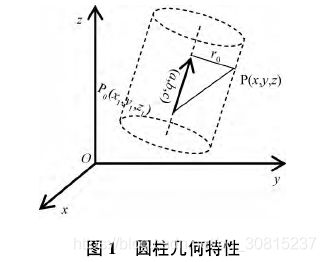
3、MATLAB中的圆柱拟合:初始模型参数表示为[x,y,z,dx,dy,dz,r]。其中(x,y,z)是圆柱中心轴上的一个点,(dx,dy,dz)指定轴的方向,r是半径。
- 第一步:每次随机选两个点P0,P1,这两个点在拟合圆柱的表面上。用于拟合中心轴和半径:
输入是2*6的矩阵,每行代表一个样本,每行的前3列代表x,y,z,后三行代表该点的法向量。
function model = fitCylinder(points)
p1 = points(1,1:3);
n1 = points(1,4:6);
p2 = points(2,1:3);
n2 = points(2,4:6);
w = p1 + n1 - p2;
a = n1 * n1';%模
b = n1 * n2';%点乘
c = n2 * n2';%模
d = n1 * w';
e = n2 * w';
D = a * c - b * b;
if abs(D) < 1e-5
s = 0;
if b > c
t = d / b;
else
t = e / c;
end
else
s = (b * e - c * d) / D;
t = (a * e - b * d) / D;
end
% P0 is a point on the axis
p0 = p1 + n1 + s * n1;
% dp is a normalized vector for the direction of the axis
dp = p2 + t * n2 - p0;%(p2 + t * n2) - p0
dp = dp / norm(dp);
p1p0 = p1 - p0;
p2p1 = dp;
c = [p1p0(2)*p2p1(3) - p1p0(3)*p2p1(2), ...
p1p0(3)*p2p1(1) - p1p0(1)*p2p1(3), ...
p1p0(1)*p2p1(2) - p1p0(2)*p2p1(1)];%就是p1p0,p2p1两向量的叉乘,a*b*cos,模表示两向量围成的平行四边形的面积
% p2p1 is a unit vector, so the denominator is not needed ,p2p1是单位向量,模为1,
r = sqrt(sum(c.*c, 2));%即c的模(面积)就是高,也就是半径
model = [p0, dp, r];- 第二步:根据模型参数,然后求全体点云中的每个点P0到中心轴的距离。
function dis = evalCylinder(model, points)
p1p0 = [points(:,1)-model(1), points(:,2)-model(2), points(:,3)-model(3)];
p2p1 = model(4:6);
c = [p1p0(:,2)*p2p1(3) - p1p0(:,3)*p2p1(2), ...
p1p0(:,3)*p2p1(1) - p1p0(:,1)*p2p1(3), ...
p1p0(:,1)*p2p1(2) - p1p0(:,2)*p2p1(1)];
% p2p1 is a unit vector, so the denominator is not needed
D = sum(c.*c, 2);
dis = abs(sqrt(D) - model(7));#求得是误差error- 第三步:计算损失,通过总损失来衡量模型的拟合好坏
% Evaluate model with truncated loss评估具有截断损失
dis = evalFunc(modelParams, allPoints);
dis(dis > threshold) = threshold;
accDis = sum(dis);实例:

points=[1,1,0,1,0,0;1,2,0,1,0,0]
p1 = points(1,1:3);
n1 = points(1,4:6);
p2 = points(2,1:3);
n2 = points(2,4:6);
w = p1 + n1 - p2;
a = n1 * n1';%模
b = n1 * n2';%点乘,标量
c = n2 * n2';%模
d = n1 * w';
e = n2 * w';
D = a * c - b * b;
if abs(D) < 1e-5
s = 0;
if b > c
t = d / b;
else
t = e / c;
end
else
s = (b * e - c * d) / D;
t = (a * e - b * d) / D;
end
% P0 is a point on the axis
p0 = p1 + n1 + s * n1;
% dp is a normalized vector for the direction of the axis
dp = p2 + t * n2 - p0;%(p2 + t * n2) - p0
dp = dp / norm(dp);
p1p0 = p1 - p0;
p2p1 = dp;
c = [p1p0(2)*p2p1(3) - p1p0(3)*p2p1(2), ...
p1p0(3)*p2p1(1) - p1p0(1)*p2p1(3), ...
p1p0(1)*p2p1(2) - p1p0(2)*p2p1(1)];%就是p1p0,p2p1两向量的叉乘,a*b*sin,模表示两向量围成的平行四边形的面积
% p2p1 is a unit vector, so the denominator is not needed ,p2p1是单位向量,模为1,
r = sqrt(sum(c.*c, 2));%求c的模(表示两向量围成的平行四边形的面积)因为这里p2p1是单位向量,所以面积就是高,也就是半径
model = [p0, dp, r];不行,还是看不懂MATLAB到底是怎么拟合圆柱了,求助!!!会的请留言给我,谢谢
圆柱拟合:
由圆柱面的几何特性可得,圆柱面上的点到其轴线的距离恒等于半径 r0,其中,P 为圆柱面上任意一点,P0( x0,y0,z0) 为圆柱轴线上一点, ( a,b,c) 为圆柱轴线向量,r0为圆柱底圆半径。圆柱面上任意一点到其轴线的距离为半径 r0,即:

求出这七个参数,就可以唯一确定一个圆柱。
圆柱拟合步骤主要包括两步: 一是确定柱面模型参数初始值; 二是建立误差方程式求解参数值。本文算法结合主成分分析法与线性最小二乘法,确定圆 柱 轴 线 向 量 ( a,b,c) 、圆 柱 轴 线 上 一 点( x1,y1,z1) 、圆柱底圆半径 r 这七个柱面模型参数初始值,再建立改进误差方程式,求解参数。
本文柱面拟合方法详细步骤如下:
1、确定柱面模型参数初始值。
搜寻圆柱面上任意一点的若干邻近点,将这些点拟合成平面,得到的平面法向量单位化即该点的单位法向量。对圆柱面上每个点处理,得到每个点的单位法向量。将每个点的单位法向量看成点,将这些点拟合成平面,得到平面法向量,即圆柱轴线向量初始值 a0、b0、c0,该步骤使用了主成分分析法进行求解。(这一步和matlab源码很相似,matlab使用两个点,及它们的法向量来拟合圆柱。) 得到轴线后,对圆柱进行坐标转换,使圆柱轴线向量 ( a0,b0,c0) 变 换 为 平 行 Z 轴 的 向 量 ,这样圆柱面上的点的(x,y)坐标就是一个平面圆形,用他们拟合圆心,即( x1,y1,z1)和半径r.
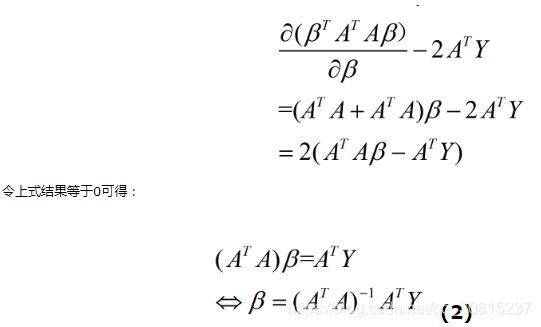
2、建立误差方程。

将误差方程写成矩阵形式,要让V最小,接近0:
![]()


from:https://www.cnblogs.com/wangkundentisy/p/7505487.html
用最小二乘法求解, Ax=0的最小二乘解,即为求解![]() 的最小特征值对应的特征向量。这是一个循环的迭代过程,每一次迭代过程中代入的初值都等于上一次的初值加上求出的 X 的改正值,当 X 的数值小到满足要求的精度时退出迭代。
的最小特征值对应的特征向量。这是一个循环的迭代过程,每一次迭代过程中代入的初值都等于上一次的初值加上求出的 X 的改正值,当 X 的数值小到满足要求的精度时退出迭代。
![]()
代码:
for (int i = 0; i < size; i++) {
float x = cloud_in->points[i].x;
float y = cloud_in->points[i].y;
float z = cloud_in->points[i].z;
f0 = pow(x - x0, 2) + pow(y - y0, 2) + pow(z - z0, 2) - pow((a0*(x - x0) + b0 * (y - y0) + c0 * (z - z0)), 2) - r0 * r0;
L(i, 0) = -f0;
B(i, 0) = (a0 * (a0*(x - x0) + b0 * (y - y0) + c0 * (z - z0)) - (x - x0)) * 2;
B(i, 1) = (b0 * (a0*(x - x0) + b0 * (y - y0) + c0 * (z - z0)) - (y - y0)) * 2;
B(i, 2) = (c0 * (a0*(x - x0) + b0 * (y - y0) + c0 * (z - z0)) - (z - z0)) * 2;
B(i, 3) = -(a0*(x - x0) + b0 * (y - y0) + c0 * (z - z0))*(x - x0) * 2;
B(i, 4) = -(a0*(x - x0) + b0 * (y - y0) + c0 * (z - z0))*(y - y0) * 2;
B(i, 5) = -(a0*(x - x0) + b0 * (y - y0) + c0 * (z - z0))*(z - z0) * 2;
B(i, 6) = -2*r0;
}
X = B.colPivHouseholderQr().solve(L);,求解 L=BX,用最小二乘法求解X。
PCL实现:
PCL库自带的圆柱模型拟合,由于在查找最佳圆柱面的过程中会过滤很多点,因此考虑利用最小二乘的模型来拟合最接近实际点云的一个圆柱面,code如下:
#include "pch.h"
#include
#include
#include
#include
#include
#include
#include
#include
#include
// use ransanc to fit cylinder
int fitCylinder(pcl::PointCloud::Ptr cloud_in, pcl::PointCloud::Ptr &cloud_out) {
// Create segmentation object for cylinder segmentation and set all the parameters
pcl::ModelCoefficients::Ptr coeffients_cylinder(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers_cylinder(new pcl::PointIndices);
// Normals
pcl::search::Search::Ptr tree = boost::shared_ptr>(new pcl::search::KdTree);
pcl::PointCloud::Ptr normalsFilter(new pcl::PointCloud);
pcl::NormalEstimation normalEstimator;
normalEstimator.setSearchMethod(tree);
normalEstimator.setInputCloud(cloud_in);
normalEstimator.setKSearch(30);
normalEstimator.compute(*normalsFilter);
pcl::SACSegmentationFromNormals seg;
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_CYLINDER);
seg.setMethodType(pcl::SAC_RANSAC);
//seg.setNormalDistanceWeight(0.1);
seg.setNormalDistanceWeight(0.2); // for coarse data
seg.setMaxIterations(1000);
seg.setDistanceThreshold(0.3);
seg.setRadiusLimits(0, 6); // radius is within 8 centimeters
seg.setInputCloud(cloud_in);
seg.setInputNormals(normalsFilter);
// Perform segment
seg.segment(*inliers_cylinder, *coeffients_cylinder);
std::cerr << "Cylinder coefficient: " << *coeffients_cylinder << std::endl;
// Ouput extracted cylinder
pcl::ExtractIndices extract;
extract.setInputCloud(cloud_in);
extract.setIndices(inliers_cylinder);
extract.filter(*cloud_out);
pcl::PCDWriter wr;
wr.write("Extract_Cylinder.pcd", *cloud_out);
float sum_D = 0.0;
float sum_Ave = 0.0;
float x0 = coeffients_cylinder->values[0];
float y0 = coeffients_cylinder->values[1];
float z0 = coeffients_cylinder->values[2];
float l = coeffients_cylinder->values[3];
float m= coeffients_cylinder->values[4];
float n = coeffients_cylinder->values[5];
float r0 = coeffients_cylinder->values[6];
for (int i = 0; i < cloud_out->points.size(); i++) {
float x = cloud_out->points[i].x;
float y = cloud_out->points[i].y;
float z = cloud_out->points[i].z;
// D=part1+part2
float part1 = pow(x - x0, 2) + pow(y - y0, 2) + pow(z - z0, 2) - pow(r0, 2);
float part2 = -pow(l*(x - x0) + m * (y - y0) + n * (z - z0), 2) / (l*l + m * m + n * n);
sum_D +=pow( part1 + part2,2);
sum_Ave += fabs(part1 + part2);
}
std::cerr << "The average difference is " << sum_Ave / cloud_out->points.size() << std::endl;;
std::cerr << "The Difference of average difference is " << sum_D / cloud_out->points.size() << std::endl;;
// evaluate the cylinder quation
}
from:https://blog.csdn.net/zhangxz259/article/details/86711348
参考论文:一种圆柱面拟合方法 ,袁建刚,潘轶