数字图像处理篇(6)边缘检测原理及其算子
目录
一、引言
1、图像中的求导
2、梯度
二、理想情况边缘检测
1、Roberts算子
2、Prewitt算子与Sobel算子
3、Laplacian算子
三、非理想状态下的边缘检测
1、LoG高斯-拉普拉斯算子
2、canny算子
一、引言
给定一张图像,我们如何去找到最显著的边缘呢?考虑下面这幅图中的彩色图像,如果有人让你指出最显著的边缘,你会追踪哪些边缘?


定性的说,依据人眼的理性判断,我们所追踪的边缘可能会出现在那些颜色、亮度或者纹理不一样的区域之间。可是,电脑不像人眼,它又是怎么判断边缘的呢?
1、图像中的求导
别慌!计算机没有脑子判断,但是计算机会做数学计算呀!我们想想,如果从数学的角度定义边缘,理想状况下,我们可以说边缘是图像强度函数f(x,y)中变化迅速的地方。可以通过计算函数导数的方式来找到强度函数迅速变化的点。导数值大,则说明变化越大;导数值等于0,则说明灰度值没有发生变化;导数值小,则说明灰度值变化小。如下图很形象的表示了这一层关系:

由于图片内部是一个个像素构成,而不是连续值,所以我们求导也是取的离散导数(有限差分)。一共有三种一阶求导的方式:
①前向差分
![]()
②反向差分
![]()
③中心差分
![]()
二阶求导我们定义为:
![]()
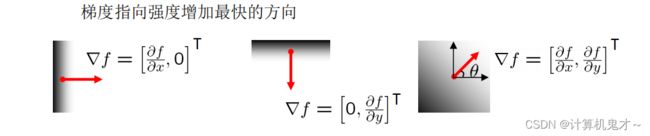
2、梯度
那么根据微积分的知识,图像强度函数下降最快的方向即为梯度的方向,如果找到一种方法,能求出图片的梯度方向,是不是边缘检测的问题就迎刃而解了?
定义图像强度函数f在坐标(x,y)处的梯度定义为二维列向量:
![]()
这个向量在位置(x,y)处的几何性质是它指向f的最大变化率方向。而该向量的幅值表示为M(x,y),是梯度向量方向的变化率在(x,y)处的值。同时M(x,y)是与原图像大小相同的图像,通常称这幅图为梯度图像。同时为了创造线性算子,我们把梯度的计算用绝对值来代替平方运算求和后进行平方根运算。如下面这个公式:
![]()
二、理想情况边缘检测
我们已经知道了边缘检测的数学逻辑,那么接下来需要我们去构造一个卷积核,与图像进行互相关运算来达到边缘检测的效果。由于下面这个图下文会经常见用到,我们在本篇博客中,统一将此图命名为图A。下面将介绍几种能够进行边缘检测的算子。

1、Roberts算子
Roberts 算子是利用交叉差值寻找边缘的一种算子,是最简单的边缘检测算子之一。Roberts 算子利用对角线方向相邻两像素之差近似梯度值来检测边缘,检测垂直边缘的效果要优于其他方向边缘,定位精度高,但是也有一定的缺点,比如说是非对称的,无法检测45°倍数的边缘。
依据引言部分的结论,我们知道,在图A中![]() 位置的一阶导数的最简近似值是
位置的一阶导数的最简近似值是![]() 以及
以及![]() ,Roberts在早期数字图像处理开发中,却提出了另一种方式近似,我们称之为交叉差值。即把gx和gy替换为
,Roberts在早期数字图像处理开发中,却提出了另一种方式近似,我们称之为交叉差值。即把gx和gy替换为![]() 和
和![]() 。
。
根据梯度向量的幅值近似运算,我们可以想到![]() 也就是说,我们能构造出下面这个算子,我们称之为Roberts交叉梯度算子,简称为罗伯特算子。
也就是说,我们能构造出下面这个算子,我们称之为Roberts交叉梯度算子,简称为罗伯特算子。

我们用之前学过的2D卷积函数对图像进行处理,处理的代码如下,不过大家可以先自己动动手,再来看小编的代码:
import cv2
import numpy as np
import matplotlib.pyplot as plt
import random
#导入自己的图片,记得图片名改成自己的
img=cv2.imread("picture.jpg",-1)
#创造x与y方向的roberts算子
kernelX=np.array([[-1,0],[0,1]])
kernelY=np.array([[0,-1],[1,0]])
img1=cv2.filter2D(img,-1, kernelX, borderType=cv2.BORDER_REFLECT)
img2=cv2.filter2D(img,-1, kernelY, borderType=cv2.BORDER_REFLECT)
#将两个相加,形成M(x,y)
Roberts = cv2.addWeighted(img1, 0.5, img1, 0.5, 0)
cv2.imshow("x",img1)
cv2.imwrite("x.jpg",img1)
cv2.imshow("y",img2)
cv2.imwrite("y.jpg",img2)
cv2.imshow("roberts",Roberts)
cv2.imwrite("roberts.jpg",Roberts)
cv2.waitKey()
cv2.destroyAllKeys()小编得出的结果如下图(建议在暗处观察):

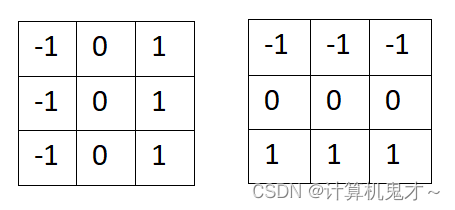
2、Prewitt算子与Sobel算子
如我们前几节所述,我们更喜欢使用奇数卷积核,比如说3×3的、5×5的,一个最简单的思路就是,如果我们算x方向上的图像强度值变化,我们可以用它右边的强度值减去左边的强度值,即![]() ,同理,对于y方向上的有
,同理,对于y方向上的有![]() 。同时,为了抵抗噪声(避免某个点的“突变”),我们选择将它周围的点也带入运算,也就是说,x方向上会变成
。同时,为了抵抗噪声(避免某个点的“突变”),我们选择将它周围的点也带入运算,也就是说,x方向上会变成![]() 。基于此思想我们可以得到下面的算子,称之为prewitt算子,其中左边这个是x方向上求梯度,右边这个是y方向上求梯度。
。基于此思想我们可以得到下面的算子,称之为prewitt算子,其中左边这个是x方向上求梯度,右边这个是y方向上求梯度。
如果我们再对这个算子进行一点提高,我们可能会想到在“平滑”中对每个点赋予权重这一思想。于是乎,我们将![]() 所在的这一行或者这一列赋予更高的权重。比如说2,此时就形成了应用更为广泛的sobel算子,还有其余权重下的算子,比如说scharr算子,其实与sobel大同小异,小编这里就不介绍了。
所在的这一行或者这一列赋予更高的权重。比如说2,此时就形成了应用更为广泛的sobel算子,还有其余权重下的算子,比如说scharr算子,其实与sobel大同小异,小编这里就不介绍了。

同理,左边的是x方向上的梯度,右边的是y方向上的梯度。同时。我们期待在用这两个核进行图像处理后,图像的每一个点有正有负,所以我们期待能够先取绝对值,然后使大于255的值变为255。并且我们需要修改图像的深度,如果为8位的深度,256会被计算机进行“取余”运算,变成一个很小的值。并且由于有正有负,我们一般把深度调节为64位。
除了使用2D卷积函数,其实在open-cv中有专门的Sobel函数如下:
dst = cv2.Sobel(src, ddepth, dx, dy[, dst[, ksize[, borderType]]])
参数及其含义:
dst:输出图像
src:输入图像
ddepth:图像深度,例如用cv2.CV_16S代表16位,-1代表保持不变
dx:在x方向上的求导阶数,取值为0或1
dy:在y方向上的求导阶数,取值同上。(如果dx为1,dy为0,代表求x方向上的梯度)
ksize:卷积核的大小
borderType:边缘样式
进行取绝对值的函数如下:
dst=cv2.convertScaleAbs(src[,alpha[,beta]]])
参数及其含义:
dst:输出图像
src:输入图像
alpha:调节系数
beta:调节亮度
稍微练练手,如下述代码:
import cv2
import numpy as np
import random
#记得改为自己图像的名字
img=cv2.imread("picture.jpg",0)
#算x方向的梯度
img1=cv2.Sobel(img,cv2.CV_64F,1,0)
img1=cv2.convertScaleAbs(img1)
cv2.imshow("x",img1)
cv2.imwrite("x.jpg",img1)
#算y方向上的梯度
img2=cv2.Sobel(img,cv2.CV_64F,0,1)
img2=cv2.convertScaleAbs(img2)
cv2.imshow("y",img2)
cv2.imwrite("y.jpg",img2)
#x方向与y方向梯度的结合
Sobel = cv2.addWeighted(img1, 0.5, img1, 0.5, 0)
cv2.imshow("sobel",Sobel)
cv2.imwrite("sobel.jpg",Sobel)
cv2.waitKey()
cv2.destroyAllKeys()得到的结果如下图:

3、Laplacian算子
刚刚我们讲述的几种算子全是利用的一阶求导的方式,那么有没有使用二阶求导的算子呢?
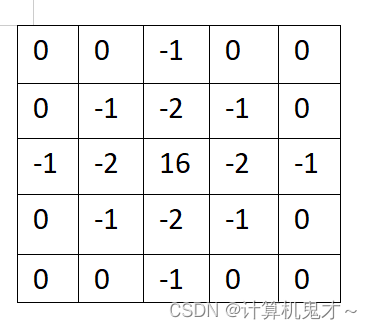
答案是肯定的,我们有![]() ,所以可以证明,两个变量的离散拉普拉斯算子是
,所以可以证明,两个变量的离散拉普拉斯算子是![]() ,即卷积核如下图:
,即卷积核如下图:

该算子能从四个方向上体现出,边界点的梯度值大,而非边界点梯度值小,同时也要去调整深度并且进行取绝对值的运算,大家可以自行验证该结论。小编这里科普一下open-cv里与之相关的拉普拉斯函数。
dst=cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
参数及其含义:
dst:输出图像
src:输入图像
ddepth:深度
ksize:用于计算二阶导数的核尺寸大小
scale:缩放因子,默认为1,表示不缩放
delta:输出图像的偏移量,一般为0
borderType:边界样式,具体取值看小编以前写的文章
三、非理想状态下的边缘检测
刚刚我们讨论了一般情况下的边缘检测原理及其实现方式,但是对于一些含有噪声的图片,我们如何去寻找边界?
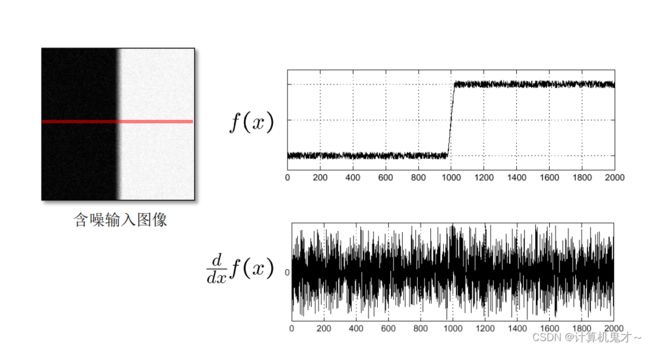 边缘在哪里?
边缘在哪里?
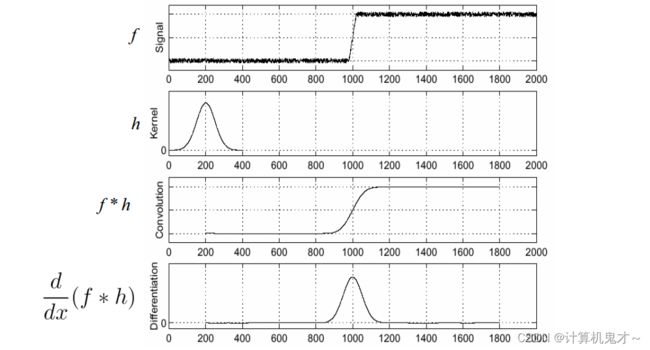
1、LoG高斯-拉普拉斯算子
在之前写过的文章中,我们说过,可以使用平滑操作处理图像,使噪点消除。最常见的线性平滑操作是进行高斯平滑。也就是说对被高斯核卷积后的图像进行边缘检测,而我们目前学的边缘检测最优方法是拉普拉斯算子。而卷积与微分具有结合性,即![]() 。这一性质为我们节省了一项操作。(也就是通过
。这一性质为我们节省了一项操作。(也就是通过![]() 后的结果寻找到一个更为合适的核),我们把这个新得到的算子称之为LoG算子,也叫做高斯拉普拉斯算子。
后的结果寻找到一个更为合适的核),我们把这个新得到的算子称之为LoG算子,也叫做高斯拉普拉斯算子。
高斯函数(蓝)、一阶高斯函数求偏导(红)以及二阶高斯函数求偏导(绿)后的结果:
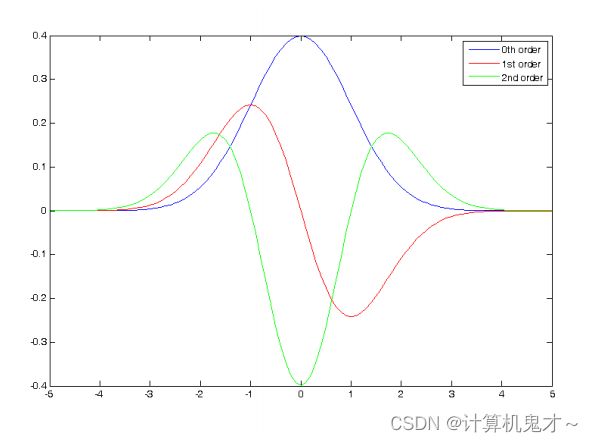
如此一来,我们能够构造一个LoG算子,如下图
在open-cv实战中直接用一个2D卷积就行了,相信大家都会,小编这里就不演示了。
2、canny算子
下面将介绍一种更为复杂的边缘检测算子-------canny算子,它的一般流程如下:

首先第一步,去躁,这一步很简单,直接用高斯滤波法,进行卷积处理即可,这里不做更多解释了。第二步,梯度运算,就是利用sobel算子求出每一个点的梯度幅值M(x,y)与方向θ(x,y)。第三步为非极大值抑制,它的作用是瘦边。即将该点处的M(x,y)值与正负几个像素值作比较,如果它是最大的才会显现出来,否则就会被“抑制”掉。第四部,选择两个阈值,maxVal以及minVal,大于maxVal的像素直接入选,小于minVal的像素直接pass掉。
open-cv中相关函数:
edges=cv2.Canny(src,threshold1,threshold2)
参数及其含义:
edges:得到边缘的图像
threshold1:第一个阈值
threshold2:第二个阈值
import cv2
import numpy as np
img=cv2.imread("p.jpg",0)
img1=cv2.Canny(img,210,50)
cv2.imshow("x",img1)
cv2.imwrite("x.jpg",img1)
cv2.waitKey()
cv2.destroyAllKeys()
得到的图片:

本期的数字图像处理课就到此为止啦,点赞加收藏,带你学习更多数字图像处理的知识!
