- 【Dive Into Stable Diffusion v3.5】1:开源项目正式发布——深入探索SDv3.5模型全参/LoRA/RLHF训练
Donvink
大模型#AIGCstablediffusionAIGC人工智能机器学习深度学习
目录1引言2项目简介3快速上手3.1下载代码3.2环境配置3.3项目结构3.4下载模型与数据集3.5运行指令3.6核心参数说明3.6.1通用参数3.6.2优化器/学习率3.6.3数据相关4结语1引言在人工智能和机器学习领域,生成模型的应用越来越广泛。StableDiffusion作为其中的佼佼者,因其强大的图像生成能力而备受关注。今天,我的开源项目DiveIntoStableDiffusionv3
- 云原生边缘计算:分布式智能的时代黎明
桂月二二
云原生边缘计算分布式
引言:从集中式算力到万物智联的范式裂变AT&T边缘节点部署超5000个,特斯拉自动驾驶系统每节点200TOPS算力。国家电网通过边缘计算实现毫秒级电网故障隔离,菜鸟物流分拣效率提升400%。IDC预测2027年边缘基础设施支出将达亿,宝马汽车工厂设备预测性维护准确率达9亿运维成本。一、边缘计算范式进化论1.1算力拓扑结构演变世代大型主机中心化云计算分布式雾计算去中心化边缘计算泛在化神经形态计算体计
- PostgreSQL技术大讲堂 - 第82讲,主题:数据安全利器--密码安全策略构建
m0_65303136
postgresql数据库
PostgreSQL技术大讲堂-第82讲,主题:数据安全利器--密码安全策略构建讲课内容:1、密码安全概述2、启用密码安全策略3、深入密码安全构建4、PG密码安全策略漏洞数据库用户的密码安全关系在整个数据库的安全,控制密码的复杂度、密码复用控制、密码定期重置直接影响密码的安全,本期技术公开课为大家展示如何构建密码安全策略。欢迎持续关注CUUGPostgreSQL技术大讲堂。
- Java IDEA中Gutter Icons图标的含义
路宇
java笔记javaintellij-idea开发语言gutter-icons图标Java开发工具
前些天发现了一个蛮有意思的人工智能学习网站,8个字形容一下"通俗易懂,风趣幽默",感觉非常有意思,忍不住分享一下给大家。点击跳转到教程前言:很多人刚开始用IDEA来学习编程,会发现下面这些图标。但是我们有时候并不知道它的含义和设置显示与隐藏,下面给大家讲解一下装订线图标位于左侧编辑器中。它们调用一些基本操作以及其他特定于框架和技术的功能。设置步骤File->Setting进到idea的设置页面。接
- 当今前沿技术:改变生活的创新趋势
jiemizhushou
生活经验分享
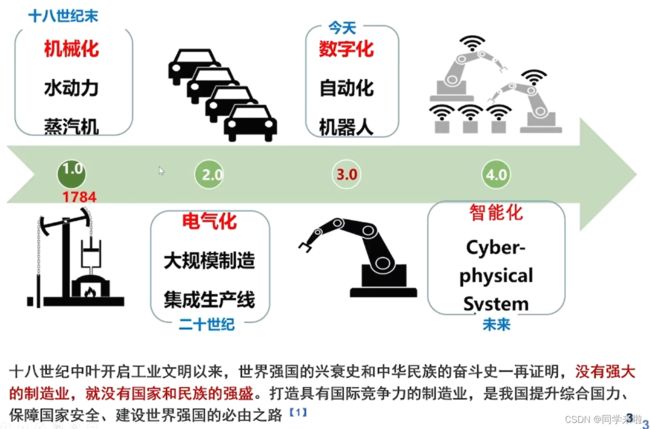
智能机器人在工业生产中正发挥着重要作用。这些机器人提高了生产效率,降低了人工成本,成为现代制造业的核心工具。现如今,汽配、电子和食品等行业都在积极采用智能机器人。例如,富士康在其手机生产线上使用机器人,以提升生产线的自动化程度。通过这些机器人,富士康不仅提高了生产速度,还确保了产品的一致性和质量。未来,智能机器人的应用将更加广泛。随着技术的不断进步,机器人将更加智能化,能够完成更复杂的任务。例如,
- 基于51单片机设计的呼吸灯
鱼弦
单片机系统合集51单片机嵌入式硬件单片机
鱼弦:公众号【红尘灯塔】,CSDN博客专家、内容合伙人、新星导师、全栈领域优质创作者、51CTO(Top红人+专家博主)、github开源爱好者(go-zero源码二次开发、游戏后端架构https://github.com/Peakchen)基于51单片机设计的呼吸灯是一种常见的LED灯效应果,通过控制LED的亮度逐渐增加和减小,模拟人类呼吸的效果。下面将对其原理、应用场景、算法实现、代码实现等进
- 项目经理面试全攻略:从底层能力拆解到高通过率话术
在竞争激烈的职场中,项目经理岗位的面试堪称“综合能力大考”——既要展现系统化的方法论,又要传递真实的领导力,还要让考官相信你能在复杂环境中推动结果落地。据PMI(美国项目管理协会)调查,82%的优秀项目经理在面试中能清晰呈现“业务价值-团队协作-风险控制”的三角能力模型。本文从能力拆解、面试准备、实战话术三个维度,揭秘项目经理面试通关法则。一、项目经理面试的四大核心能力雷达图面试官通过以下维度评估
- 8Manage竞价系统如何帮助优化汽车零部件采购管理?
Sadie_d
汽车软件需求软件工程
在汽车零部件制造行业,采购管理是企业运营中的核心环节之一。随着市场竞争的加剧和供应链复杂性的提升,如何高效、透明地完成询比价流程,成为许多企业关注的重点。特别是对于一家汽车零部件制造商来说,从发布采购需求到最终选择供应商,整个过程需要兼顾效率、成本和质量。而引入一个智能化的采购竞价系统,或许能为这一需求提供理想的解决方案。汽车零部件采购的痛点对于汽车零部件制造商而言,采购环节往往面临多重挑战。首先
- 【硬核实战】ETCD+AI智能调度深度整合!从架构设计到调优避坑,手把手教你打造高可用调度系统!
码农突围计划
人工智能etcd大数据
一、核心架构设计:ETCD如何赋能AI调度?架构图:[AI调度引擎]←实时数据→[ETCD集群]↓决策指令[执行层(车辆/物流/交通设备)]核心角色:ETCD:存储调度策略、节点状态、任务队列、实时环境数据(如交通流量、天气)AI模型:基于ETCD数据动态决策(如路径规划、资源分配)调度执行层:接收ETCD下发的指令并执行(如车辆调度、信号灯控制)优势:强一致性:ETCD的Raft协议确保调度策略
- 信创产品在政府采购中的五大优势
程序员
信创产品在政府采购中扮演着越来越重要的角色,其优势逐渐凸显,为政府采购领域带来了诸多积极影响。随着信息技术的飞速发展和国家对自主创新的高度重视,信创产品凭借自身独特的特性,在政府采购市场中展现出强大的竞争力。以下将详细阐述信创产品在政府采购中的五大优势。安全性更高在数字化时代,信息安全至关重要,尤其是对于政府采购项目,涉及大量敏感信息和公共利益。信创产品在安全性方面具有显著优势。首先,信创产品的研
- 【科研必备】EI/Scopus收录!2025年3-4月智能制造、自动化、无人驾驶、人工智能等前沿领域国际会议邀您参与~与全球学者交流,让学术之光在国际舞台上闪耀!
努力毕业的小土博^_^
学术会议推荐制造自动化人工智能深度学习神经网络算法
【科研必备】EI/Scopus收录!2025年3-4月智能制造、无人驾驶、人工智能等前沿领域国际会议邀您参与~与全球学者交流,让学术之光在国际舞台上闪耀!【科研必备】EI/Scopus收录!2025年3-4月智能制造、无人驾驶、人工智能等前沿领域国际会议邀您参与~与全球学者交流,让学术之光在国际舞台上闪耀!文章目录【科研必备】EI/Scopus收录!2025年3-4月智能制造、无人驾驶、人工智能等
- 合合信息名片全能王上架原生鸿蒙应用市场,成为首批数字名片类应用
华为harmonyos
长期以来,名片都是企业商务沟通的重要工具。随着企业数字化转型,相较于传统的纸质名片,数字名片对于企业成员拓展业务、获取商机、提升企业形象等方面发挥着重要作用。近期,合合信息旗下名片全能王正式上线原生鸿蒙应用市场,成为首批上线的数字名片类应用,帮助用户用AI扫描、识别和管理名片,提高商务沟通和客户数据管理的效率。名片全能王是一款智能名片及人脉管理APP,基于合合信息的智能文字识别技术,可将复杂场景下
- 华为ensp--BGP路径选择Community
华为路由bgp
学习新思想,争做新青年,今天学习的是BGP路径选择Community实验目的·理解团体属性的概念与作用·熟悉运用团体属性来控制路由传递的方法·理解No-Export、No-Advertise、No-Export-Subconfed属性的区别实验内容本实验网络中,R1属于AS100,R2、R3和R4属于AS编号为200的一个联盟,R5属于AS300。在联盟AS200中,R2和R4属于成员AS2001
- AI让奥运报道一键跨越,见证新华社新科技
云计算视频云音视频
媒体智能与巴黎奥运的一场邂逅。随着巴黎奥运会开幕式为全世界掀起一场文艺浪潮,塞纳河畔也从浪漫艺术的盛宴,转向体育竞技的击攘。让全世界不可错过巴黎前方的每刻高光,更需要一场多媒体技术的迎赶革新。于是,我们看到另一场媒体技术舞台,浮出塞纳河的水面。新华社作为国际奥委会认可的唯一非西方的国际通讯社,此次启用由阿里云和山东广电信通联合打造的重大报道共享系统,以AI领先应用,助力巴黎奥运报道。图示:新华社在
- 知识库在意图识别中扮演着**数据支撑**和**语义理解辅助**的双重角色
PersistDZ
大数据与AI人工智能
知识库在意图识别中扮演着数据支撑和语义理解辅助的双重角色,而训练智能客服的意图识别Agent需要结合知识库的结构化数据与机器学习技术。以下是详细解析:一、知识库在意图识别中的作用1.提供标注数据意图标签定义:知识库中存储了预先定义的意图分类体系(如“订单查询”“退换货”“投诉”等),为模型提供明确的训练目标。标注样本:知识库包含大量用户对话历史及其对应的意图标签,是训练监督学习模型的核心数据源。2
- K8S学习之基础四十:配置altermanager发送告警到钉钉群
云上艺旅
K8S学习kubernetes学习钉钉prometheus云原生容器
配置altermanager发送告警到钉钉群创建钉钉群,设置机器人助手(必须是管理员才能设置),获取webhookwebhook:https://oapi.dingtalk.com/robot/send?access_token=25bed933a52d69f192347b5be4b2193bc0b257a6d9ae68d81619e3ae3d93f7c6#创建cm,配置钉钉群信息vialertm
- Flutter 适配HarmonyOS NEXT:调用原生功能实现相册选取与拍照
Flutter适配鸿蒙系统:调用原生功能实现相册选取与拍照项目背景我们的移动端项目基于Flutter开发,为控制开发周期与成本,采用了HarmonyOSNEXT(简称鸿蒙)的Flutter兼容库,并更新了部分三方库为鸿蒙的Flutter兼容库。在图片视频选择与拍摄功能上,我们之前调用的是Android和iOS的原生方法,现在需要为鸿蒙开发一套原生配合使用的方案。遇到的问题鸿蒙的Flutter兼容库
- 一切皆是映射:DQN训练加速技术:分布式训练与GPU并行
AI天才研究院
计算AI大模型企业级应用开发实战ChatGPT计算科学神经计算深度学习神经网络大数据人工智能大型语言模型AIAGILLMJavaPython架构设计AgentRPA
1.背景介绍1.1深度强化学习的兴起近年来,深度强化学习(DeepReinforcementLearning,DRL)在游戏、机器人控制、自然语言处理等领域取得了令人瞩目的成就。作为一种结合深度学习和强化学习的强大技术,DRL能够使智能体在与环境交互的过程中学习最优策略,从而实现自主决策和控制。1.2DQN算法及其局限性深度Q网络(DeepQ-Network,DQN)是DRL的一种经典算法,它利用
- python面试题详解
__wishing__
python
十道经典面试题(python)1.一行代码实现累加1-100之和print(sum(range(1,101)))输出结果:5050分析:利用sum函数进行累加。range控制序列。2.一行代码实现列表去重#声明需要去重的列表list1=[1,1,2,2,3,3,4,4]list1=list(set(list1))</
- LangChain入门:使用Python和通义千问打造免费的Qwen大模型聊天机器人
南七小僧
人工智能网站开发AI技术产品经理服务器数据库windows
前言LangChain是一个用于开发由大型语言模型(LargeLanguageModels,简称LLMs)驱动的应用程序的框架。它提供了一个灵活的框架,使得开发者可以构建具有上下文感知能力和推理能力的应用程序,这些应用程序可以利用公司的数据和APIs。这个框架由几个部分组成。LangChain库:Python和JavaScript库。包含了各种组件的接口和集成,一个基本的运行时,用于将这些组件组合
- 数仓建模—Data Warebase AI 时代数据平台应当的样子
不二人生
数仓建模人工智能数据仓库数仓建模
DataWarebaseAI时代数据平台应当的样子引言:在这个AI技术飞速发展的时代,我们有能力更深入地发掘数据潜在的价值,而数据处理不应当成为阻碍。云原生分布式DataWarebase将开启处理数据的新范式,它让数据的使用返璞归真,不论是存储还是查询,一个系统满足业务全方位数据需求。打破复杂数据架构的束缚,大大降低数据的使用门槛,释放数据潜能,让数据涌现智能。背景近二十年大数据发展史2002年我
- 图生视频技术的发展与展望:从技术突破到未来图景
Liudef06
StableDiffusion音视频人工智能深度学习stablediffusion
一、技术发展现状图生视频(Image-to-VideoGeneration)是生成式人工智能(AIGC)的重要分支,其核心是通过单张或多张静态图像生成动态视频序列。近年来,随着深度学习、多模态融合和计算硬件的进步,图生视频技术经历了从基础研究到商业落地的快速演进。早期探索与GAN的奠基早期图生视频技术主要基于生成对抗网络(GAN),通过对抗训练生成低分辨率的视频片段。例如,DeepMind的DVD
- 颠覆想象,余承东官宣,华为3月将推全球首款原生鸿蒙新形态手机
佳晓晓
智能手机python华为scikit-learndjango
家人们,2月24日这一天,科技圈又被华为投下了一颗重磅炸弹!华为常务董事、终端BG董事长、智能汽车解决方案BU董事长余承东发布视频预告,2025年3月,华为将推出一款全新形态的手机,而且它是全球首款为原生鸿蒙而生的产品!这消息一放出来,各大科技论坛、社交平台瞬间就炸了锅,大家都在疯狂猜测这款手机到底长啥样,会有啥黑科技。其实,余承东之前就多次暗示过今年会有让人意想不到的产品问世。早在去年12月25
- 引入 DeepSeek,企业人力成本优化利器
小柔说科技
人工智能大数据软件开发deepseek
AI在销售领域的表现越来越惊艳。在销售成交过程中,从添加微信到完成咨询,AI全程对答如流,流程顺畅,宛如一位经验丰富的销售冠军。试想一下,如果将这样成熟的AI智能体应用到企业中,原本依赖大量人力的销售业绩,或许只需一个AI就能轻松完成。企业甚至可以从100名员工优化到30名、10名,最终迈向无人化运营。AI不仅提升了效率,更开启了企业运营的全新模式。1.AI销售的高效性在这个案例中,AI从客户咨询
- 【论文阅读】MMedPO: 用临床感知多模态偏好优化调整医学视觉语言模型
勤奋的小笼包
论文阅读语言模型人工智能自然语言处理chatgpt
MMedPO:用临床感知多模态偏好优化调整医学视觉语言模型1.背景2.核心问题:3.方法:3.实验结果与优势4.技术贡献与意义5.结论MMedPO:AligningMedicalVision-LanguageModelswithClinical-AwareMultimodalPreferenceOptimizationMMedPO:用临床感知多模态偏好优化调整医学视觉语言模型gitgub:地址1.
- Rust语言介绍和猜数字游戏的实现
栖林_
Rustrust游戏开发语言
文章目录Rust语言介绍和猜数字游戏的实现cargo是什么使用Rust编写猜数字Rust语言介绍和猜数字游戏的实现Rust语言是一种系统编程语言,核心强调安全性、并发性以及高性能,由类似于C/C++的底层控制能力,性能也非常接近,Rust有一些特性所有权系统,这个可以自动管理内存,无需垃圾回收器,保证数据的安全零成本抽象,高层抽象不会带来运行时的开销,运行时的效率会很高线程安全,在编译阶段就能防止
- IOT物联网平台简单介绍
可乐加.糖
IOT物联网物联网iot智慧城市
物联网平台简单介绍文章目录物联网平台简单介绍1、什么是物联网平台2、物联网平台的网络模型3、国内常见的物联网平台4、物联网平台南向北向南向接口北向接口5、物联网平台的意义物联网的意义主要体现在以下几个方面:6、物联网平台的应用智能家居智能城市工业自动化医疗保健农业零售物流等其他行业1、什么是物联网平台物联网平台(TheInternetofThings,简称IOT)物联网平台是指用于连接、管理和控制
- 【C++】面向对象的三大特性:封装、继承、多态(3)
_Yeps
【C++】基础知识解析c++算法
1、面向对象的三大特性:封装、继承、多态——【C++】面向对象的三大特性:封装、继承、多态(1)详见以上链接,点击蓝字。2、C++的封装是如何实现的?——【C++】面向对象的三大特性:封装、继承、多态(2)详见以上链接,点击蓝字。3、C++的继承是如何实现的?在C++中,继承是通过:(冒号)+访问控制修饰符(public、protected、private)实现的。class父类{//父类的成员}
- SGM61230 同步降压转换器技术文档
慎独yfs
电子元器件单片机嵌入式硬件
第一章概述SGM61230是一款宽输入电压范围(4.5V至28V)的同步降压转换器,可提供高达3A的输出电流。该器件集成功率开关和峰值电流模式控制补偿电路,采用6引脚TSOT-23封装,内置5ms软启动功能以抑制浪涌电流。关键特性:-**智能保护机制**:逐周期峰值电流限制、输出过压保护(OVP)、带自动恢复的热关断-**高效模式切换**:轻载时进入脉冲跳过模式(PSM),重载时自动切换至PWM模
- C++11智能指针
Peter_chq
c++开发语言
一、指针管理的困境资源释放了,但指针没有置空(野指针、指针悬挂、踩内存)没有释放资源,产生内存泄漏问题;重复释放资源,引发coredump二、智能指针
- linux系统服务器下jsp传参数乱码
3213213333332132
javajsplinuxwindowsxml
在一次解决乱码问题中, 发现jsp在windows下用js原生的方法进行编码没有问题,但是到了linux下就有问题, escape,encodeURI,encodeURIComponent等都解决不了问题
但是我想了下既然原生的方法不行,我用el标签的方式对中文参数进行加密解密总该可以吧。于是用了java的java.net.URLDecoder,结果还是乱码,最后在绝望之际,用了下面的方法解决了
- Spring 注解区别以及应用
BlueSkator
spring
1. @Autowired
@Autowired是根据类型进行自动装配的。如果当Spring上下文中存在不止一个UserDao类型的bean,或者不存在UserDao类型的bean,会抛出 BeanCreationException异常,这时可以通过在该属性上再加一个@Qualifier注解来声明唯一的id解决问题。
2. @Qualifier
当spring中存在至少一个匹
- printf和sprintf的应用
dcj3sjt126com
PHPsprintfprintf
<?php
printf('b: %b <br>c: %c <br>d: %d <bf>f: %f', 80,80, 80, 80);
echo '<br />';
printf('%0.2f <br>%+d <br>%0.2f <br>', 8, 8, 1235.456);
printf('th
- config.getInitParameter
171815164
parameter
web.xml
<servlet>
<servlet-name>servlet1</servlet-name>
<jsp-file>/index.jsp</jsp-file>
<init-param>
<param-name>str</param-name>
- Ant标签详解--基础操作
g21121
ant
Ant的一些核心概念:
build.xml:构建文件是以XML 文件来描述的,默认构建文件名为build.xml。 project:每个构建文
- [简单]代码片段_数据合并
53873039oycg
代码
合并规则:删除家长phone为空的记录,若一个家长对应多个孩子,保留一条家长记录,家长id修改为phone,对应关系也要修改。
代码如下:
- java 通信技术
云端月影
Java 远程通信技术
在分布式服务框架中,一个最基础的问题就是远程服务是怎么通讯的,在Java领域中有很多可实现远程通讯的技术,例如:RMI、MINA、ESB、Burlap、Hessian、SOAP、EJB和JMS等,这些名词之间到底是些什么关系呢,它们背后到底是基于什么原理实现的呢,了解这些是实现分布式服务框架的基础知识,而如果在性能上有高的要求的话,那深入了解这些技术背后的机制就是必须的了,在这篇blog中我们将来
- string与StringBuilder 性能差距到底有多大
aijuans
之前也看过一些对string与StringBuilder的性能分析,总感觉这个应该对整体性能不会产生多大的影响,所以就一直没有关注这块!
由于学程序初期最先接触的string拼接,所以就一直没改变过自己的习惯!
- 今天碰到 java.util.ConcurrentModificationException 异常
antonyup_2006
java多线程工作IBM
今天改bug,其中有个实现是要对map进行循环,然后有删除操作,代码如下:
Iterator<ListItem> iter = ItemMap.keySet.iterator();
while(iter.hasNext()){
ListItem it = iter.next();
//...一些逻辑操作
ItemMap.remove(it);
}
结果运行报Con
- PL/SQL的类型和JDBC操作数据库
百合不是茶
PL/SQL表标量类型游标PL/SQL记录
PL/SQL的标量类型:
字符,数字,时间,布尔,%type五中类型的
--标量:数据库中预定义类型的变量
--定义一个变长字符串
v_ename varchar2(10);
--定义一个小数,范围 -9999.99~9999.99
v_sal number(6,2);
--定义一个小数并给一个初始值为5.4 :=是pl/sql的赋值号
- Mockito:一个强大的用于 Java 开发的模拟测试框架实例
bijian1013
mockito单元测试
Mockito框架:
Mockito是一个基于MIT协议的开源java测试框架。 Mockito区别于其他模拟框架的地方主要是允许开发者在没有建立“预期”时验证被测系统的行为。对于mock对象的一个评价是测试系统的测
- 精通Oracle10编程SQL(10)处理例外
bijian1013
oracle数据库plsql
/*
*处理例外
*/
--例外简介
--处理例外-传递例外
declare
v_ename emp.ename%TYPE;
begin
SELECT ename INTO v_ename FROM emp
where empno=&no;
dbms_output.put_line('雇员名:'||v_ename);
exceptio
- 【Java】Java执行远程机器上Linux命令
bit1129
linux命令
Java使用ethz通过ssh2执行远程机器Linux上命令,
封装定义Linux机器的环境信息
package com.tom;
import java.io.File;
public class Env {
private String hostaddr; //Linux机器的IP地址
private Integer po
- java通信之Socket通信基础
白糖_
javasocket网络协议
正处于网络环境下的两个程序,它们之间通过一个交互的连接来实现数据通信。每一个连接的通信端叫做一个Socket。一个完整的Socket通信程序应该包含以下几个步骤:
①创建Socket;
②打开连接到Socket的输入输出流;
④按照一定的协议对Socket进行读写操作;
④关闭Socket。
Socket通信分两部分:服务器端和客户端。服务器端必须优先启动,然后等待soc
- angular.bind
boyitech
AngularJSangular.bindAngularJS APIbind
angular.bind 描述: 上下文,函数以及参数动态绑定,返回值为绑定之后的函数. 其中args是可选的动态参数,self在fn中使用this调用。 使用方法: angular.bind(se
- java-13个坏人和13个好人站成一圈,数到7就从圈里面踢出一个来,要求把所有坏人都给踢出来,所有好人都留在圈里。请找出初始时坏人站的位置。
bylijinnan
java
import java.util.ArrayList;
import java.util.List;
public class KickOutBadGuys {
/**
* 题目:13个坏人和13个好人站成一圈,数到7就从圈里面踢出一个来,要求把所有坏人都给踢出来,所有好人都留在圈里。请找出初始时坏人站的位置。
* Maybe you can find out
- Redis.conf配置文件及相关项说明(自查备用)
Kai_Ge
redis
Redis.conf配置文件及相关项说明
# Redis configuration file example
# Note on units: when memory size is needed, it is possible to specifiy
# it in the usual form of 1k 5GB 4M and so forth:
#
- [强人工智能]实现大规模拓扑分析是实现强人工智能的前奏
comsci
人工智能
真不好意思,各位朋友...博客再次更新...
节点数量太少,网络的分析和处理能力肯定不足,在面对机器人控制的需求方面,显得力不从心....
但是,节点数太多,对拓扑数据处理的要求又很高,设计目标也很高,实现起来难度颇大...
- 记录一些常用的函数
dai_lm
java
public static String convertInputStreamToString(InputStream is) {
StringBuilder result = new StringBuilder();
if (is != null)
try {
InputStreamReader inputReader = new InputStreamRead
- Hadoop中小规模集群的并行计算缺陷
datamachine
mapreducehadoop并行计算
注:写这篇文章的初衷是因为Hadoop炒得有点太热,很多用户现有数据规模并不适用于Hadoop,但迫于扩容压力和去IOE(Hadoop的廉价扩展的确非常有吸引力)而尝试。尝试永远是件正确的事儿,但有时候不用太突进,可以调优或调需求,发挥现有系统的最大效用为上策。
-----------------------------------------------------------------
- 小学4年级英语单词背诵第二课
dcj3sjt126com
englishword
egg 蛋
twenty 二十
any 任何
well 健康的,好
twelve 十二
farm 农场
every 每一个
back 向后,回
fast 快速的
whose 谁的
much 许多
flower 花
watch 手表
very 非常,很
sport 运动
Chinese 中国的
- 自己实践了github的webhooks, linux上面的权限需要注意
dcj3sjt126com
githubwebhook
环境, 阿里云服务器
1. 本地创建项目, push到github服务器上面
2. 生成www用户的密钥
sudo -u www ssh-keygen -t rsa -C "
[email protected]"
3. 将密钥添加到github帐号的SSH_KEYS里面
3. 用www用户执行克隆, 源使
- Java冒泡排序
蕃薯耀
冒泡排序Java冒泡排序Java排序
冒泡排序
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 2015年6月23日 10:40:14 星期二
http://fanshuyao.iteye.com/
- Excle读取数据转换为实体List【基于apache-poi】
hanqunfeng
apache
1.依赖apache-poi
2.支持xls和xlsx
3.支持按属性名称绑定数据值
4.支持从指定行、列开始读取
5.支持同时读取多个sheet
6.具体使用方式参见org.cpframework.utils.excelreader.CP_ExcelReaderUtilTest.java
比如:
Str
- 3个处于草稿阶段的Javascript API介绍
jackyrong
JavaScript
原文:
http://www.sitepoint.com/3-new-javascript-apis-may-want-follow/?utm_source=html5weekly&utm_medium=email
本文中,介绍3个仍然处于草稿阶段,但应该值得关注的Javascript API.
1) Web Alarm API
&
- 6个创建Web应用程序的高效PHP框架
lampcy
Web框架PHP
以下是创建Web应用程序的PHP框架,有coder bay网站整理推荐:
1. CakePHP
CakePHP是一个PHP快速开发框架,它提供了一个用于开发、维护和部署应用程序的可扩展体系。CakePHP使用了众所周知的设计模式,如MVC和ORM,降低了开发成本,并减少了开发人员写代码的工作量。
2. CodeIgniter
CodeIgniter是一个非常小且功能强大的PHP框架,适合需
- 评"救市后中国股市新乱象泛起"谣言
nannan408
首先来看百度百家一位易姓作者的新闻:
三个多星期来股市持续暴跌,跌得投资者及上市公司都处于极度的恐慌和焦虑中,都要寻找自保及规避风险的方式。面对股市之危机,政府突然进入市场救市,希望以此来重建市场信心,以此来扭转股市持续暴跌的预期。而政府进入市场后,由于市场运作方式发生了巨大变化,投资者及上市公司为了自保及为了应对这种变化,中国股市新的乱象也自然产生。
首先,中国股市这两天
- 页面全屏遮罩的实现 方式
Rainbow702
htmlcss遮罩mask
之前做了一个页面,在点击了某个按钮之后,要求页面出现一个全屏遮罩,一开始使用了position:absolute来实现的。当时因为画面大小是固定的,不可以resize的,所以,没有发现问题。
最近用了同样的做法做了一个遮罩,但是画面是可以进行resize的,所以就发现了一个问题,当画面被reisze到浏览器出现了滚动条的时候,就发现,用absolute 的做法是有问题的。后来改成fixed定位就
- 关于angularjs的点滴
tntxia
AngularJS
angular是一个新兴的JS框架,和以往的框架不同的事,Angularjs更注重于js的建模,管理,同时也提供大量的组件帮助用户组建商业化程序,是一种值得研究的JS框架。
Angularjs使我们可以使用MVC的模式来写JS。Angularjs现在由谷歌来维护。
这里我们来简单的探讨一下它的应用。
首先使用Angularjs我
- Nutz--->>反复新建ioc容器的后果
xiaoxiao1992428
DAOmvcIOCnutz
问题:
public class DaoZ {
public static Dao dao() { // 每当需要使用dao的时候就取一次
Ioc ioc = new NutIoc(new JsonLoader("dao.js"));
return ioc.get(