卷积网络的特征图可视化(keras自定义网络+VGG16)
参考博客:
卷积神经网络特征图可视化(自定义网络和VGG网络)
https://blog.csdn.net/dcrmg/article/details/81255498
使用Keras来搭建VGG网络
https://blog.csdn.net/qq_34783311/article/details/84994351
深度神经网络可解释性:卷积核、权重和激活可视化(pytorch+tensorboard):
https://blog.csdn.net/Bit_Coders/article/details/117781090
代码:
# coding: utf-8
from keras.models import Model
import cv2
import matplotlib.pyplot as plt
from keras.models import Sequential
from keras.layers.convolutional import Convolution2D, MaxPooling2D
from keras.layers import Activation
from pylab import *
import keras
def get_row_col(num_pic):
squr = num_pic ** 0.5
row = round(squr)
col = row + 1 if squr - row > 0 else row
return row, col
def visualize_feature_map(img_batch):
feature_map = np.squeeze(img_batch, axis=0)
print(feature_map.shape)
feature_map_combination = []
plt.figure()
num_pic = feature_map.shape[2]
row, col = get_row_col(num_pic)
for i in range(0, num_pic):
feature_map_split = feature_map[:, :, i]
feature_map_combination.append(feature_map_split)
plt.subplot(row, col, i + 1)
plt.imshow(feature_map_split)
axis('off')
title('feature_map_{}'.format(i))
plt.savefig('feature_map.png')
plt.show()
# 各个特征图按1:1 叠加
feature_map_sum = sum(ele for ele in feature_map_combination)
plt.imshow(feature_map_sum)
plt.savefig("feature_map_sum.png")
plt.show()
def create_model():
model = Sequential()
# 第一层CNN
# 第一个参数是卷积核的数量,第二三个参数是卷积核的大小
model.add(Convolution2D(9, 5, 5, input_shape=img.shape))
model.add(Activation('relu'))
model.add(MaxPooling2D(pool_size=(4, 4)))
# 第二层CNN
model.add(Convolution2D(9, 5, 5, input_shape=img.shape))
model.add(Activation('relu'))
model.add(MaxPooling2D(pool_size=(3, 3)))
# 第三层CNN
model.add(Convolution2D(9, 5, 5, input_shape=img.shape))
model.add(Activation('relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
# 第四层CNN
model.add(Convolution2D(9, 3, 3, input_shape=img.shape))
model.add(Activation('relu'))
# model.add(MaxPooling2D(pool_size=(2, 2)))
return model
if __name__ == "__main__":
img = cv2.imread('001.jpg')
model = create_model()
model.summary()
img_batch = np.expand_dims(img, axis=0)
model = Model(inputs=model.input, outputs=model.get_layer('conv2d_1').output) # 获取某层的输出
conv_img = model.predict(img_batch) # conv_img 卷积结果
visualize_feature_map(conv_img)
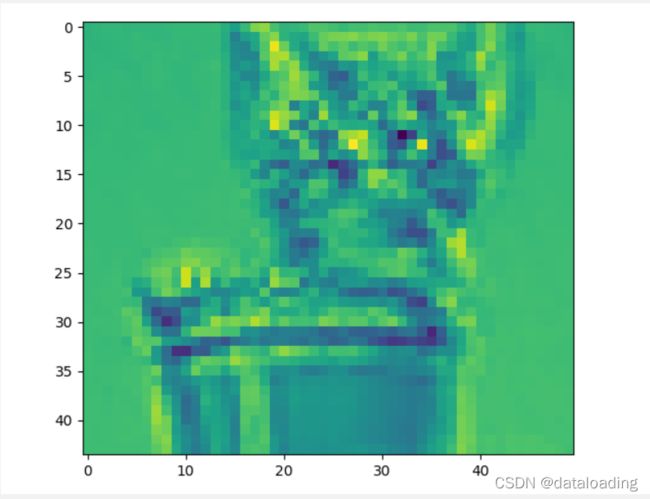
这里定义了一个4层的卷积,每个卷积层分别包含9个卷积、Relu激活函数和尺度不等的池化操作,系数全部是随机初始化。
输入的原图如下:

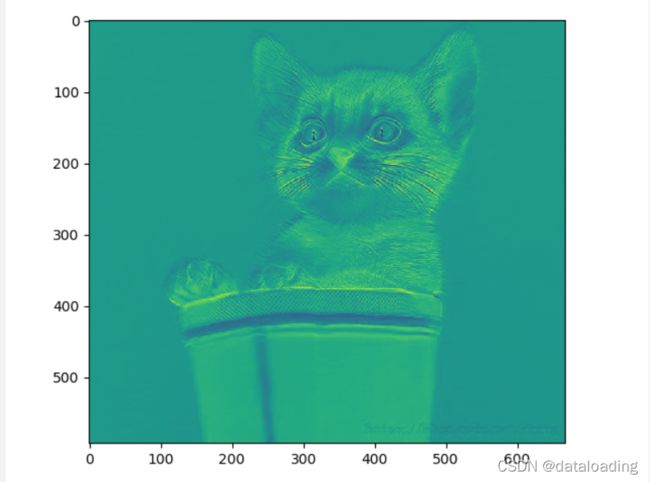
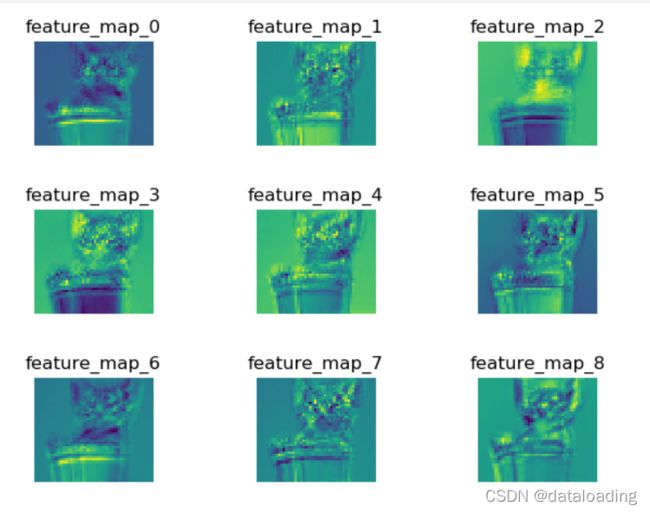
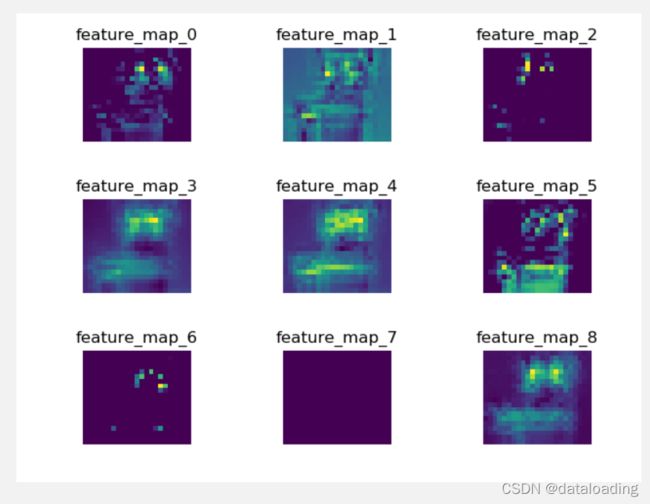
第一层卷积后可视化的特征图:
feature_map_shape: (593, 667, 9)
(593x667)x 9

所有第一层特征图1:1融合后整体的特征图:
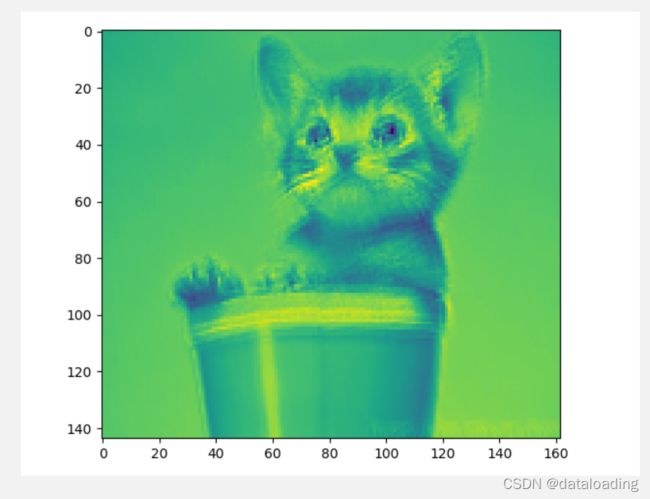
第二层卷积后可视化的特征图:
feature_map_shape: (144, 162, 9)
(144 x162) x 9

所有第二层特征图1:1融合后整体的特征图:
第三层卷积后可视化的特征图:
feature_map_shape: (44, 50, 9)
(44 x 50) x 9
所有第三层特征图1:1融合后整体的特征图:
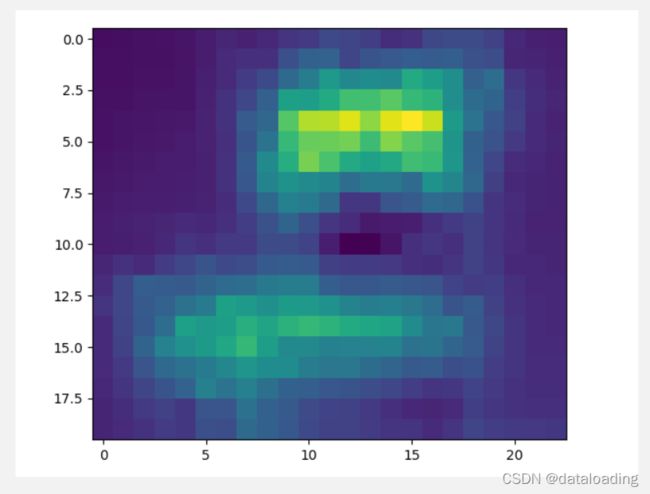
第四层卷积后可视化的特征图:
feature_map_shape: (20, 23, 9)
(20 x 23) x 9
所有第四层特征图1:1融合后整体的特征图:
从不同层可视化出来的特征图大概可以总结出一点规律:
- 浅层网络提取的是纹理、细节特征
- 深层网络提取的是轮廓、形状、最强特征(如猫的眼睛区域)
- 浅层网络包含更多的特征,也具备提取关键特征(如第一组特征图里的第4张特征图,提取出的是猫眼睛特征)的能力
- 相对而言,层数越深,提取的特征越具有代表性
- 图像的分辨率是越来越小的
下面是VGG16的结构:
def create_model():
model = Sequential()
# VGG16
# layer_1
model.add(keras.layers.Conv2D(filters=64, kernel_size=3, strides=1,
padding='same', activation='relu', kernel_initializer='uniform',
input_shape=(48, 48, 3)))
model.add(keras.layers.Conv2D(filters=64, kernel_size=3, strides=1,
padding='same', activation='relu', kernel_initializer='uniform'))
model.add(keras.layers.MaxPool2D(pool_size=2))
# layer_2
model.add(keras.layers.Conv2D(filters=128, kernel_size=3, strides=1,
padding='same', activation='relu', kernel_initializer='uniform'))
model.add(keras.layers.Conv2D(filters=128, kernel_size=3, strides=1,
padding='same', activation='relu', kernel_initializer='uniform'))
model.add(keras.layers.MaxPool2D(pool_size=2))
# layer_3
model.add(keras.layers.Conv2D(filters=256, kernel_size=3, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.Conv2D(filters=256, kernel_size=3, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.Conv2D(filters=256, kernel_size=1, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.MaxPool2D(pool_size=2))
# layer_4
model.add(keras.layers.Conv2D(filters=512, kernel_size=3, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.Conv2D(filters=512, kernel_size=3, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.Conv2D(filters=512, kernel_size=1, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.MaxPool2D(pool_size=2))
# layer_5
model.add(keras.layers.Conv2D(filters=512, kernel_size=3, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.Conv2D(filters=512, kernel_size=3, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.Conv2D(filters=512, kernel_size=1, strides=1,
padding='same', activation='relu'))
model.add(keras.layers.MaxPool2D(pool_size=2))
model.add(keras.layers.Flatten())
# model.add(keras.layers.AlphaDropout(0.5))
model.add(keras.layers.Dense(4096, activation='relu'))
model.add(keras.layers.Dense(4096, activation='relu'))
model.add(keras.layers.Dense(1000, activation='relu'))
model.add(keras.layers.Dense(8, activation='softmax'))
return model
原图:
48 x 48像素
![]()
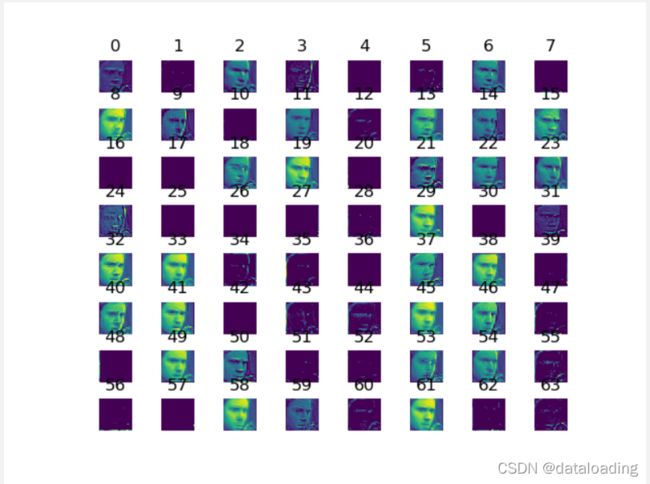
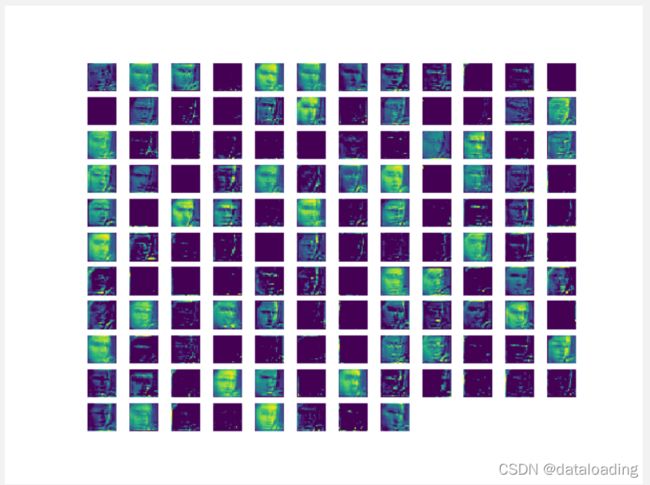
layer_1层的输出:
conv2d_2 (48, 48, 64)
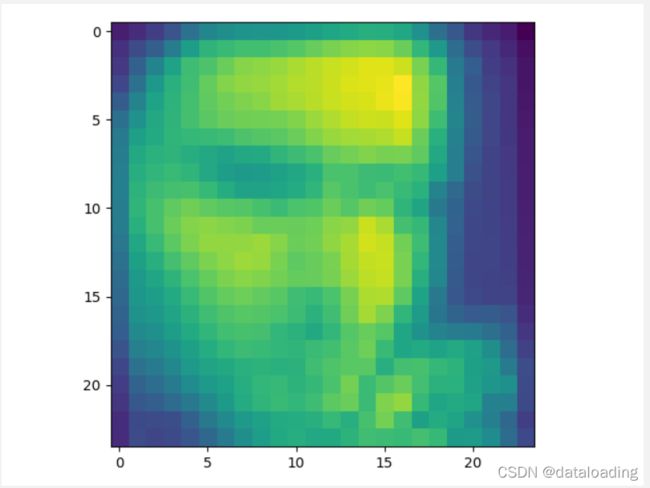
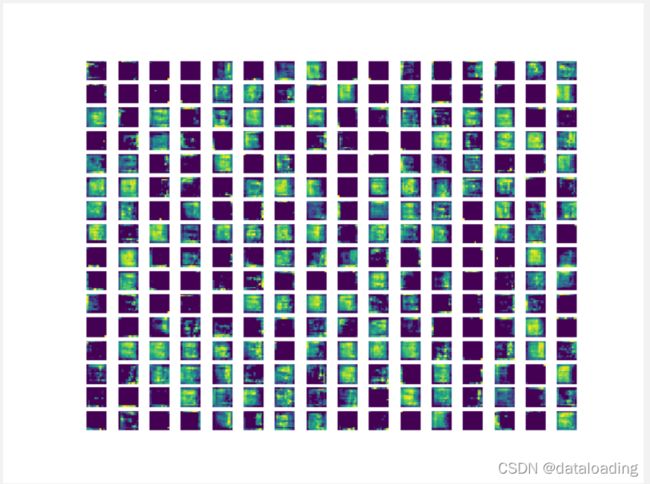
layer_2层的输出:
conv2d_4 (24, 24, 128)
layer_3层的输出:
conv2d_7 (12, 12, 256)
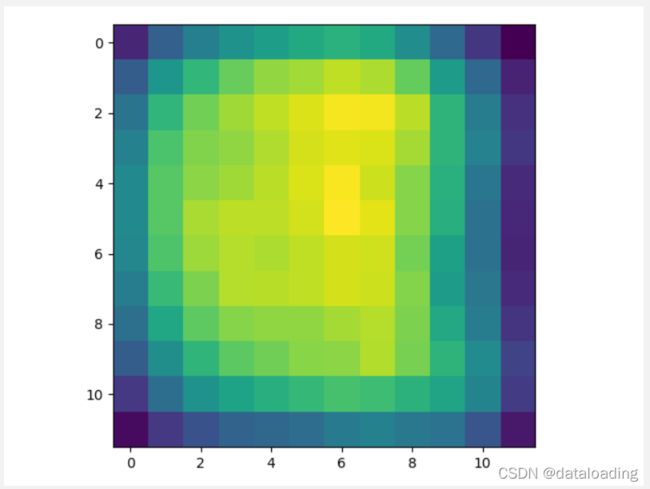
layer_4层的输出:
conv2d_10 (6, 6, 512)

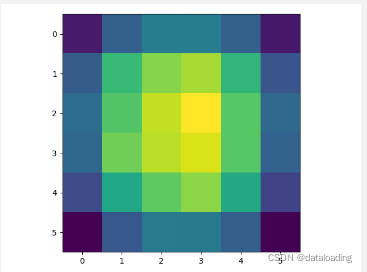
layer_5层的输出:
conv2d_13 (3, 3, 512)