RealSense T265相机使用及运行ORB-SLAM3
1、驱动安装。同realsense D435i,不做介绍。
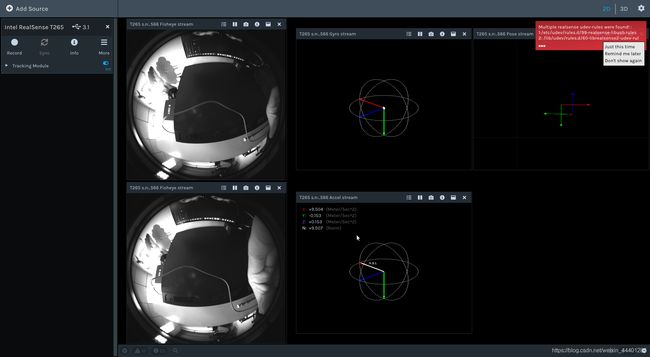
2、运行realsense-viewer查看效果

3、修改rs_t265.launch文件,查看运行效果,作如下修改:
然后运行roslaunch realsense2_camera rs_t265.launch,打开rviz可看到如下信息:

4、相机标定
使用棋盘格标定板,参数如下、
target_type: 'checkerboard' #gridtype
targetCols: 8 #number of internal chessboard corners
targetRows: 11 #number of internal chessboard corners
rowSpacingMeters: 0.03 #size of one chessboard square [m]
colSpacingMeters: 0.03 #size of one chessboard square [m]
打开相机:
roslaunch realsense2_camera rs_t265.launch
降低图像频率为4Hz:
rosrun topic_tools throttle messages /camera/fisheye1/image_raw 4 /fisheye1
rosrun topic_tools throttle messages /camera/fisheye2/image_raw 4 /fisheye2
录制话题:
rosbag record -O cameras_calibration /fisheye1 /fisheye2
确保缓慢移动,使视角出现俯仰、旋转及偏航,并前后左右充分移动。
执行标定:
kalibr_calibrate_cameras --target /home/ipsg/dataset/checkboard.yaml --bag /home/ipsg/D435I/D435I_ws/cameras_calibration.bag --bag-from-to 20 100 --models omni-radtan omni-radtan --topics /fisheye1 /fisheye2 --approx-sync 0.04 --show-extraction
标定报错:
[ERROR] [1608035432.280772]: The cameras are not connected through mutual target observations! Please provide another dataset...
原因很可能是由于录制的帧率较低,approx-sync不能达到要求,将该值改为0.1便可解决该问题。
最后输出结果camchain-homeipsgD435ID435I_wscameras_calibration.yaml及results-cam-homeipsgD435ID435I_wscameras_calibration.txt。
标定结果如下:
cam0:
cam_overlaps: [1]
camera_model: omni
distortion_coeffs: [0.048578481966630886, -0.12329618086885077, 0.0017058515882238065,
0.008458163148053649]
distortion_model: radtan
intrinsics: [1.7946192987312193, 785.310332419649, 785.010903688167, 411.17285071574804,
398.2948413792334]
resolution: [848, 800]
rostopic: /fisheye1
cam1:
T_cn_cnm1:
- [0.9990544285345555, -0.0008326003706173611, -0.04346901887689595, -0.07061212623053774]
- [0.0006412928324391894, 0.9999900492332016, -0.004414768180364775, -0.007674199954022396]
- [0.043472262064449214, 0.004382717331307942, 0.9990450211175661, -0.0001764534295979091]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [0]
camera_model: omni
distortion_coeffs: [0.0563117413081466, 0.02655163727444, -0.012797349892510072,
-0.0013211718214428542]
distortion_model: radtan
intrinsics: [1.800690075960317, 790.8643872772712, 789.8598394060772, 422.7366916664667,
413.0726005405969]
resolution: [848, 800]
rostopic: /fisheye2
参考链接:
https://zhaoxuhui.top/blog/2020/09/09/kalibr-installation-and-use.html
5、IMU标定及相机及IMU联系标定
常规操作。
6、运行ORB-SLAM3
成功运行,效果令人惊艳,双目鱼眼+IMU稳定性极好!