Deep Homography Estimation - Pytorch实现
Deep Homography Estimation - Pytorch实现
- Deep Homography Estimation- PyTorch Implementation
-
- 使用说明
- 代码实现
Deep Homography Estimation- PyTorch Implementation
Deep Image Homography Estimation
Daniel DeTone, Tomasz Malisiewicz, and Andrew Rabinovich
这篇论文的Pytorch实现,代码地址 Deep-homography-estimation-pytorch. 喜欢的朋友给个⭐哦
使用说明
一、生成合成数据集
下载COCO2014数据集,分别设置训练集、验证集和测试集对应的路径。
cd data/
python gen_data.py
生成500.000个训练样本数据、5000个验证样本数据和5000个测试样本数据。
运行完成后生成的合成数据集文件列表如下:

二、训练
python train.py
三、测试
下载预训练权重并存放在checkpoints/文件夹下
链接:https://pan.baidu.com/s/10HXNthOBhlZbrtvIkolxKw 提取码:l9l8
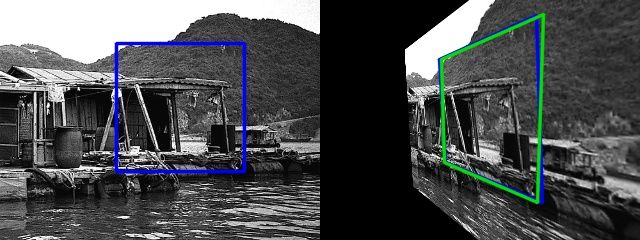
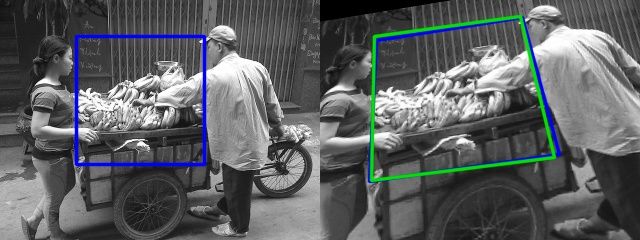
python test.py
| results |
|---|
 |
 |
 |
 |
 |
代码实现
下面对单应性模型的代码实现进行简单分析:
import torch.nn as nn
import torch.nn.functional as F
class HomographyNet(nn.Module):
def __init__(self):
super(HomographyNet, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(2, 64, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.layer2 = nn.Sequential(
nn.Conv2d(64, 64, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.layer3 = nn.Sequential(
nn.Conv2d(64, 128, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 128, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.layer4 = nn.Sequential(
nn.Conv2d(128, 128, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 128, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True)
)
self.fc = nn.Sequential(
nn.Dropout(0.5),
nn.Linear(128 * 16 * 16, 1024),
nn.ReLU(True),
nn.Dropout(0.5),
nn.Linear(1024, 8)
)
def forward(self, x):
out = self.layer1(x)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = out.contiguous().view(x.size(0), -1)
out = self.fc(out)
return out
if __name__ == "__main__":
from torchsummary import summary
model = HomographyNet().cuda()
print(HomographyNet())
summary(model, (2, 128, 128))
这是一个VGG风格的网络,网络的输入是2×128×128的Patch对,网络使用了8个卷积层,每个卷积层的窗口形状为3×3,填充为1,并紧接BatchNorm和ReLU;8个卷积层对应的滤波器数量为64,64,64,64,128,128,128,128。每两个卷积层后使用一个窗口形状为2、步幅为2的最大池化层。全连接层有1024个隐藏单元,输出层单元数为8,在最后一个卷积层之后和全连接层之后使用DropOut。
用torchsummary打印一下模型结构:
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 64, 128, 128] 1,152
BatchNorm2d-2 [-1, 64, 128, 128] 128
ReLU-3 [-1, 64, 128, 128] 0
Conv2d-4 [-1, 64, 128, 128] 36,864
BatchNorm2d-5 [-1, 64, 128, 128] 128
ReLU-6 [-1, 64, 128, 128] 0
MaxPool2d-7 [-1, 64, 64, 64] 0
Conv2d-8 [-1, 64, 64, 64] 36,864
BatchNorm2d-9 [-1, 64, 64, 64] 128
ReLU-10 [-1, 64, 64, 64] 0
Conv2d-11 [-1, 64, 64, 64] 36,864
BatchNorm2d-12 [-1, 64, 64, 64] 128
ReLU-13 [-1, 64, 64, 64] 0
MaxPool2d-14 [-1, 64, 32, 32] 0
Conv2d-15 [-1, 128, 32, 32] 73,728
BatchNorm2d-16 [-1, 128, 32, 32] 256
ReLU-17 [-1, 128, 32, 32] 0
Conv2d-18 [-1, 128, 32, 32] 147,456
BatchNorm2d-19 [-1, 128, 32, 32] 256
ReLU-20 [-1, 128, 32, 32] 0
MaxPool2d-21 [-1, 128, 16, 16] 0
Conv2d-22 [-1, 128, 16, 16] 147,456
BatchNorm2d-23 [-1, 128, 16, 16] 256
ReLU-24 [-1, 128, 16, 16] 0
Conv2d-25 [-1, 128, 16, 16] 147,456
BatchNorm2d-26 [-1, 128, 16, 16] 256
ReLU-27 [-1, 128, 16, 16] 0
Dropout-28 [-1, 32768] 0
Linear-29 [-1, 1024] 33,555,456
ReLU-30 [-1, 1024] 0
Dropout-31 [-1, 1024] 0
Linear-32 [-1, 8] 8,200
================================================================
Total params: 34,193,032
Trainable params: 34,193,032
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.12
Forward/backward pass size (MB): 70.52
Params size (MB): 130.44
Estimated Total Size (MB): 201.08
----------------------------------------------------------------
非常地VGG了。
完整代码见 Deep-homography-estimation-pytorch. 喜欢的朋友给个⭐哦