大数据与人工智能方向基础 ---- 特征选择与决策树的构建
目录
前言
一、面向分类问题的决策树特征选择
1、纯节点、不纯节点
2、节点的不纯度(杂度)
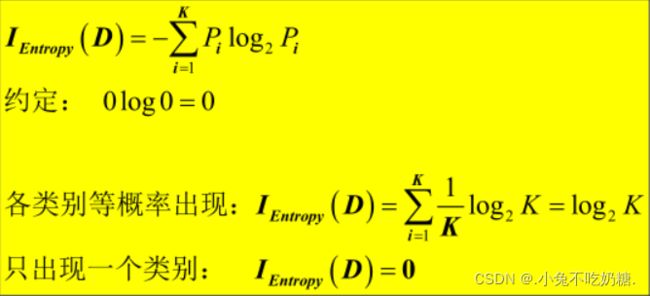
1.2.1 熵不纯度
1.2.2 方差不纯度
1.2.3 误差不纯度
3、基于不纯度的节点特征选择规则 ---- 以分类树为例
3.1 信息增益
3.2 增益率
3.3 基尼指数
二、分类树的构建
1、决策树算法的研究历史
2、ID3决策树算法
2.1 ID3算法基本思想
2.2 算法基本点
2.3 算法说明
2.4 算法步骤
3、C4.5决策树
3.1 C4.5算法简述
3.2 C4.5算法是ID3算法的后继和改进
3.3 C4.5算法步骤
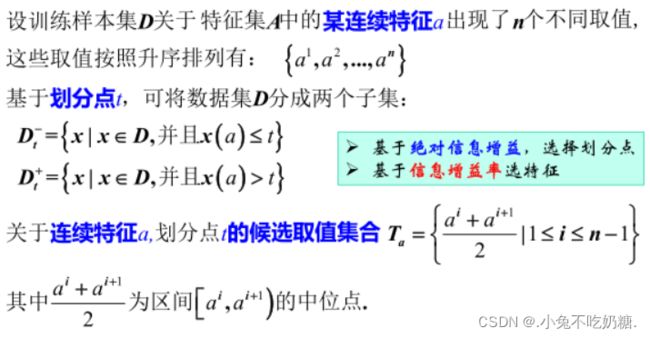
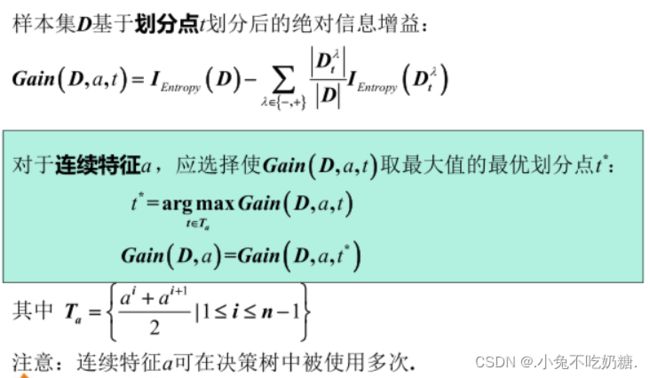
3.4 C4.5算法关于连续数值特征的处理方法 ---- 二分法
3.5 C4.5算法关于特征缺失值的处理方式
4、CART决策树
4.1 CART树的引入
4.2 递归二叉分类树的生成算法
三、回归树的构建
1、基本思想
2、CART树 ---- 最小二乘回归树生成算法
前言
有很多新手刚刚接触大数据与人工智能方向学习,如果不知道怎么着手的,跟我一起慢慢进步叭~
提示:以下是本篇文章正文内容,下面案例可供参考
一、面向分类问题的决策树特征选择
1、纯节点、不纯节点
若到达某节点的训练样本集只含一类样本,则该节点为纯节点,或同质节点;
否则,为不纯节点,或异构节点。
2、节点的不纯度(杂度)
关于决策树节点不纯程度的度量。
节点不纯度的典型度量方式:
前提:
1.2.1 熵不纯度
1.2.2 方差不纯度
1.2.3 误差不纯度

两类别分类,关于同一个数据集的三种不纯度度量与某类概率关系:
3、基于不纯度的节点特征选择规则 ---- 以分类树为例
一般而言,随着节点划分的不断进行,希望决策树分支节点所含样本尽量来自相同类别,即:节点的纯度不断增加。
3.1 信息增益
信息熵是度量样本集合纯度最常用的一种指标。假定当前样本集合D中第 k 类样本所占的比例为pk,则D的信息熵定义为:
Ent(D)的值越小,D的纯度越高。
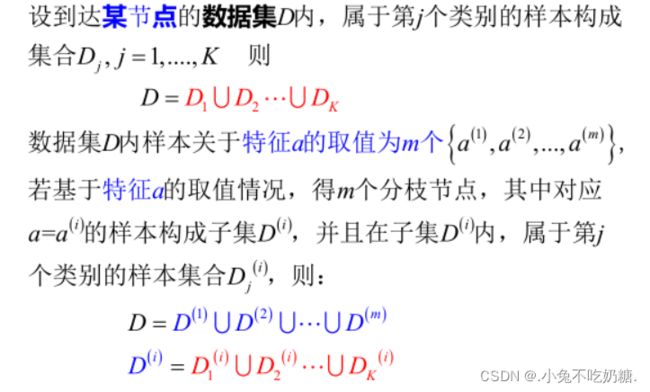
假定离散属性a有v个可能的取值{a1,a2,…,av},若使用a来对样本集D进行划分,则会产生v个分支节点,其中第v个分支节点包含了D中所有在属性a上取值为av的样本,记为Dv,我们可根据上式计算出Dv的信息熵,再考虑到不同的分支节点所包含的样本数不同,给分支节点赋予权重|Dv| / |D|,即样本数越多的分支节点的影响越大,于是可计算出用属性a对样本集D进行划分所获得的信息增益:
一般而言,信息增益越大,则意味着使用属性a来进行划分所获得的纯度提升越大,即每次划分分支时选择信息增益最大的那个属性。
3.2 增益率
实际上,信息增益准则对可取值数目较多的属性有所偏好,为减少这种偏好可能带来的不利影响,著名的决策树算法不直接使用信息增益,而是使用增益率来选择最后划分属性。增益率定义为: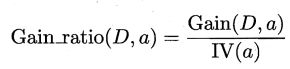 ,其中,
,其中, 称为属性a的固有值。
称为属性a的固有值。
一般来说,属性a的可能取值数目越多(即v越大),则IV(a)的值通常会越大。
需要注意的是,增益率准则对可取值数目较少的属性有所偏好。因此,我们并不是直接选择增益率最大的候选划分属性,而是使用了一个启发式:先从候选划分属性中找出信息增益高于平均水平的属性,再从中选择增益率最高的。
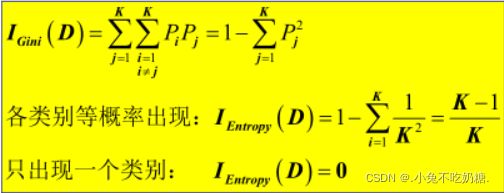
3.3 基尼指数
CART决策树使用基尼指数来选择划分属性。数据集D的纯度可用基尼值来度量:
直观来说,Gini(D)反映了从数据集D中随机抽取两个样本,其类别标记不一致的概率。因此,Gini(D)越小,数据集D的纯度越高。
属性a的基尼指数定义为:
我们在侯选属性集合A中,选择那个使得划分后基尼指数最小的属性作为最优划分属性。
二、分类树的构建
1、决策树算法的研究历史
第一个决策树算法:CLS
真正引发决策树研究热潮的算法:ID3,其增量版本还有:ID4,ID5等。
最流行的决策树算法:C4.5,以ID3为基础,可处理连续特征的算法。
通用的决策树算法:CART
基于决策树的较强学习算法还有:随机森林的集成算法
其他决策树算法:SLIQ、SPRINT、RainForest等
2、ID3决策树算法
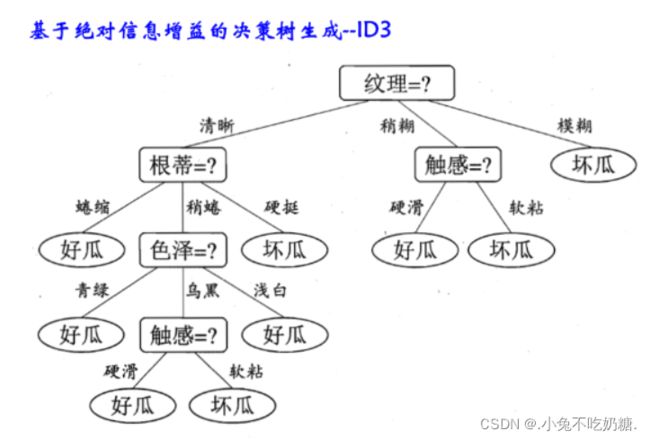
2.1 ID3算法基本思想
节点的评价 ---- 熵不纯度;新节点的生成 ---- 基于最大信息增益
2.2 算法基本点
①若当前节点只含同一类样本,则为纯节点,停止分裂;
②若当前特征列表中再无可用特征,则根据多数表决确定该节点的类标号,停止分裂;
③其他:选择最佳分裂的特征(最大信息增益足够大),根据所选特征取值(特征取值数目决定了该节点分裂为后继子节点的数目),逐一进行分裂,即递归构造决策树。
2.3 算法说明
①ID3决策树仅仅适用于离散或者非数值型特征描述的样本集
②ID3算法仅涉及决策树的生成,无剪枝步骤
③每个节点的分支数目与该节点所用的特征取值数目一致
④基于“最大信息增益”准则,确定当前节点分裂所使用的特征
⑤算法直到所有叶节点的不纯度最小(例如:到达该节点的训练样本来自同一类别)或不再有可用的特征时停止
2.4 算法步骤
输入:训练样本集D,特征集A,非负阈值![]()
输出:决策树T
STEP1.若D中所有样本属于同一类别![]() ,则T为单节点树,并将
,则T为单节点树,并将![]() 作为该节点的类别标记,返回T
作为该节点的类别标记,返回T
STEP2.若A为空集,则T为单节点树,并将D中具有最多训练样本数目的类别![]() 作为该节点的类别标记,返回T
作为该节点的类别标记,返回T
STEP3.若A不是空集,计算A中各个特征a对样本集D的信息增益{g(D,a),a∈A},并选择具有最大信息增益的特征![]() :
:
若特征![]() 的信息增益小于
的信息增益小于![]() ,则执行3.1,否则执行3.2
,则执行3.1,否则执行3.2
3.1 置T为单节点树,将D中具有最多训练样本数目的类别![]() 作为该节点的类别标记,并且返回T;
作为该节点的类别标记,并且返回T;
3.2 对特征![]() 的每一可能值
的每一可能值![]() ,按照
,按照![]() =
= ![]() ,并将D划分为若干非空子集D(i),将D(i)中具有最多训练样本数目的类别作为标记,构建子节点,由节点及其子结点构成树T,返回T。
,并将D划分为若干非空子集D(i),将D(i)中具有最多训练样本数目的类别作为标记,构建子节点,由节点及其子结点构成树T,返回T。
STEP4.对第i个子节点,以D(i)为训练集,以A-{![]() }为特征集,递归调用,得到子树Ti,返回Ti。
}为特征集,递归调用,得到子树Ti,返回Ti。
3、C4.5决策树
3.1 C4.5算法简述
C4.5算法是对ID3算法的扩展。
C4.5的特别之处:对连续数值特征的处理;对缺失值的处理。
3.2 C4.5算法是ID3算法的后继和改进
①可以处理实值数据(连续数据)
②每个划分的分支因子等于查询属性的取值个数
③采用信息增益率作为选择查询的依据
④首先让树充分生长,然后利用分支的统计显著性来实现剪枝
3.3 C4.5算法步骤
输入:训练样本集D,特征集A,非负阈值![]()
输出:决策树T
STEP1.若D中所有样本属于同一类别![]() ,则T为单节点树,并将
,则T为单节点树,并将![]() 作为该节点的类别标记,返回T
作为该节点的类别标记,返回T
STEP2.若A为空集,则T为单节点树,并将D中具有最多训练样本数目的类别![]() 作为该节点的类别标记,返回T
作为该节点的类别标记,返回T
STEP3.若A不是空集,计算A中各个特征a对样本集D的信息增益{g(D,a),a∈A},并选择具有最大信息增益率的特征![]() :
:
若特征![]() 的信息增益率小于
的信息增益率小于![]() ,则执行3.1,否则执行3.2
,则执行3.1,否则执行3.2
3.1 置T为单节点树,将D中具有最多训练样本数目的类别![]() 作为该节点的类别标记,并且返回T;
作为该节点的类别标记,并且返回T;
3.2 对特征![]() 的每一可能值
的每一可能值![]() ,按照
,按照![]() =
= ![]() ,并将D划分为若干非空子集D(i),将D(i)中具有最多训练样本数目的类别作为标记,构建子节点,由节点及其子结点构成树T,返回T。
,并将D划分为若干非空子集D(i),将D(i)中具有最多训练样本数目的类别作为标记,构建子节点,由节点及其子结点构成树T,返回T。
STEP4.对第i个子节点,以D(i)为训练集,以A-{![]() }为特征集,递归调用,得到子树Ti,返回Ti。
}为特征集,递归调用,得到子树Ti,返回Ti。
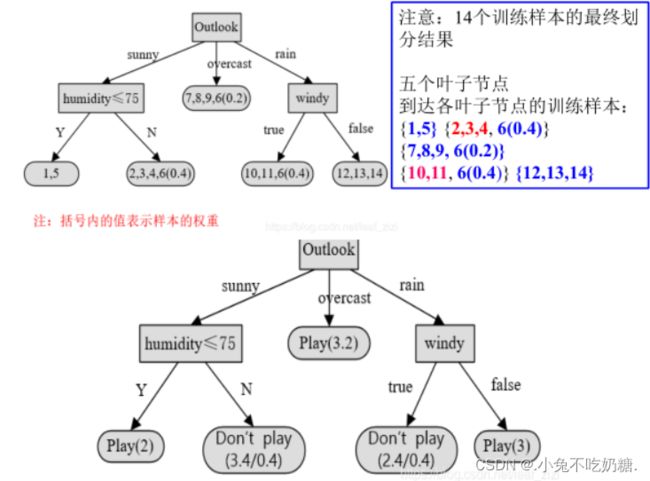
3.4 C4.5算法关于连续数值特征的处理方法 ---- 二分法
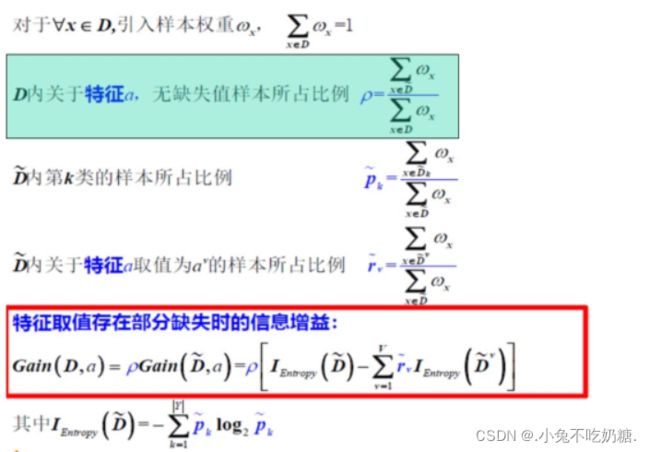
3.5 C4.5算法关于特征缺失值的处理方式
几个核心问题:
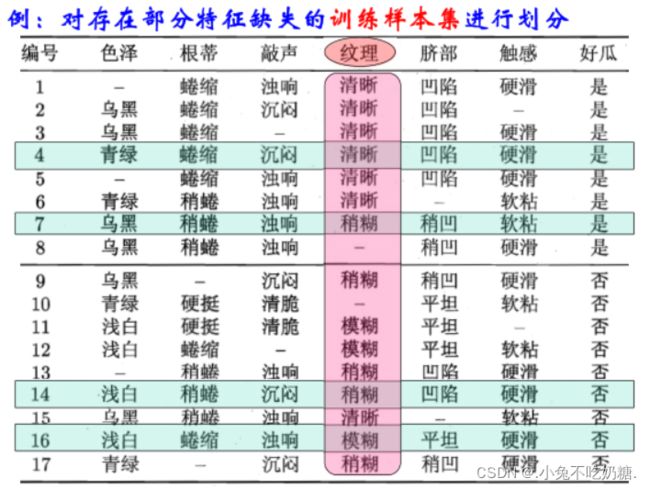
问题一:决策树的构建过程中,如何在训练样本存在特征取值缺失的情况下,进行节点的特征选择?
问题二:若已经完成了决策树某节点的特征选择,并且该节点使用的特征为具有缺失值的特征,如何基于该特征对到达当前节点的训练集进行有效划分?
问题三:若已经完成了决策树的构建,若待决策的样本关于决策树某些节点的特征存在缺失,如何对该样本的类别进行预测?
解决方案:
问题一的等价问题:若到达当前节点的训练样本中,存在部分样本关于某特征的取值缺失,如何估计基于该特征的信息增益?信息增益率?


问题二的实质:训练样本集的划分问题

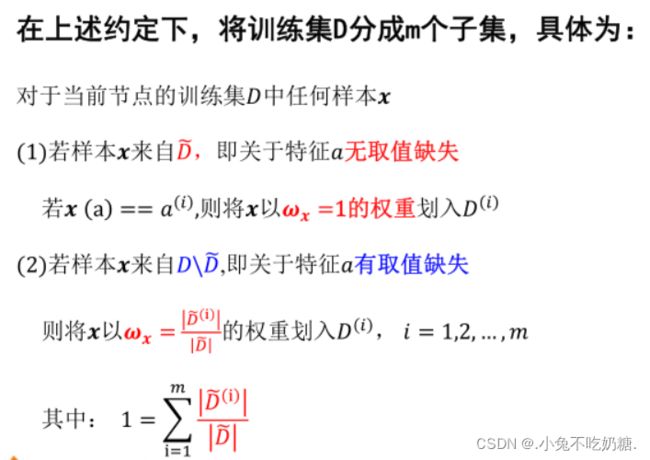
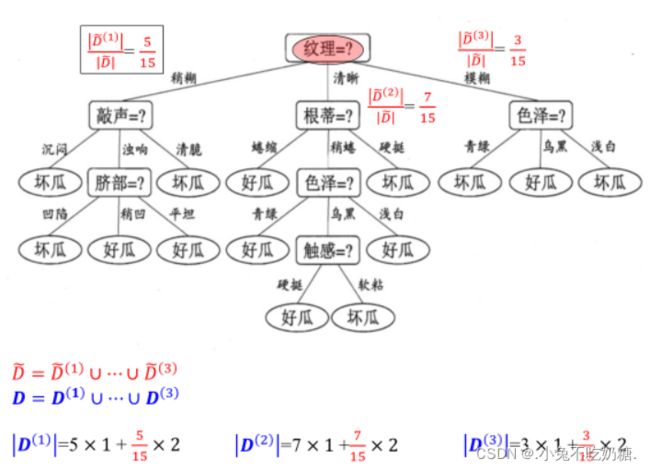
问题三的实质:如何预测具有特征缺失的样本的类别?


4、CART决策树
4.1 CART树的引入
①CART树既可用于分类,也可用于对连续变量的回归
②每个节点只能有两个子节点,说白了,CART决策树为二叉树。这样做的目的是不易产生数据碎片,精确度往往也会高于多叉树
③在CART算法中,采用了二元划分 ------ 递归二叉树
④不纯性度量:面向分类问题:基于最小GINI指数规则
面向回归问题:基于最小平方残差、最小绝对残差
⑤用独立的验证集对训练集生长的树进行剪枝
4.2 递归二叉分类树的生成算法
基本思想:a.一个分类树对应输入空间(特征空间)的一个划分,以及在该划分单元上的类别输出值;
b.根据训练样本集D,从根节点开始,将输入空间进行划分,递归构建二叉分类树;
c.借助基尼指数进行特征选择,同时决定该特征的最优二值切分点。
即:CART决策树是二叉树,内部节点特征的取值为“是”或“否”,左分支是取值为“是”的分支,右分支是取值为“否”的分支。这样的决策树等价于递归地二分每个特征,将输入空间划分为有限个单元,并在这些单元上确定预测的概率分布,也就是在输入给定的条件下输出的条件概率分布。
输入:训练样本集![]() ,其中:
,其中:![]()
停止计算的条件
输出:CART决策树
步骤:
STEP1.设节点的训练数据集为D,计算现有特征对该数据集的GINI指数。此时,对每一个特征A,对其可能取的每个值a,根据样本点对A=a的测试为“是”或“否”将D分割为D1和D2两部分,计算A=a时的GINI指数
STEP2.在所有可能的特征A以及它们所有可能的切分点a中,选择GINI指数最小的特征及其对应的切分点作为最优特征与最优切分点。依最优特征与最优切分点,从现节点生成两个子节点,将训练数据集依据特征分配到两个子节点中去
STEP3.对两个子节点递归地调用STEP1和STEP2,直至满足停止条件。停止条件:节点中的样本个数小于预定阈值,或样本集的GINI指数小于预定阈值,或者没有更多特征
STEP4.递归生成CART决策树
三、回归树的构建
1、基本思想
一个回归树对应输入空间(或特征空间)的一个划分,以及在该划分单元上的输出值。在训练样本集D所在的输入空间,递归地将每个区域划分为两个子区域,并根据落入每个子区域的训练样本输出值,决定该子区域的输出,构建二叉树。
2、CART树 ---- 最小二乘回归树生成算法
输入:训练样本集![]() ,其中:
,其中:![]()
输出:回归树f(x)
步骤:
STEP1.从输入向量x中选择最优切分变量j和切分点s,求解:
遍历变量,对固定的切分变量扫描切分点,选择使上式最小值的(j,s)对
STEP2.用选定的(j,s)对,确定划分区域R1(j,s),R2(j,s),并确定相应的输出值

STEP3.继续对两个子区域调用STEP1和STEP2,直到满足停止条件
STEP4.将输入空间划分为M个区域:R1,R2,…,Rm;生成决策树