Pytorch版本YOLOv3模型转Darknet weights模型然后转caffemodel再转wk模型在nnie上面推理
Pytorch版本YOLOv3模型转darknet weights模型然后转caffemodel再转wk模型在nnie上面推理
文章目录
-
- Pytorch版本YOLOv3模型转darknet weights模型然后转caffemodel再转wk模型在nnie上面推理
- 前言
- 1. 海思nnie设备以及转换思路
-
- 转换思路
- 2. Pytorch pth模型 —— Darknet weights模型
- 3. Darknet weights模型 —— caffemodel
- 4. Caffemodel —— wk模型
-
- 新建并且配置环境
-
- 设置芯片类型
- 设置指令仿真模式
- 准备数据文件
- 开始量化生成wk量化文件
- 5. 仿真
-
- 数据准备
- 图片列表与bgr图片生成
- 修改代码
- 开始仿真
前言
最近一直在研究海思的嵌入式设备的模型部署,手头上面训练好的YOLOv3 Pytorch版本的模型需要放在海思的嵌入式芯片上面去推理,我的芯片是Hi3519AV100(对应nnie版本是1.2)。查看官方文档,发现都是一些什么IDE使用指南之类的,写的都是边边角角,没有一个整个能够跑通的demo。所以,自己研究了好久,走了很多弯路,终于找到一套能够完全跑通的链路,这里分享给大家,让大家能够在实际使用中少走一些弯路。
1. 海思nnie设备以及转换思路
关于海思的nnie设备,是海思的一套官方深度学习的加速引擎,支持很多图像相关的算法,这里就不一一列举了,有兴趣的可以自行百度,我们本来是想迁移YOLOv4的模型,但是发现实际模型转换和量化时候并不能支持YOLOv4,原因是nnie不支持mish激活函数。所以最后我们只能够改用了YOLOv3。
转换思路
由于nnie模型量化生成wk文件时候,官方只支持caffemodel,所以需要先转化成caffemodel才能够有nnie的模型,而caffemodel最好是由c++版本darknet通过caffe的api去转化为佳,所以我们给出来的转化思路如下:
Pytorch pth模型 —— Darknet weights模型 —— caffemodel —— nnie wk模型
值得注意的一点是,如果您本来的模型已经是darknet版本的weights,那么就不需要第一步的转化而直接进行第二步。
2. Pytorch pth模型 —— Darknet weights模型
这里我们的项目原本就有一个Darknet的类,因为Pytorch的YOLOv3是第三方去适配的,所以,不同的版本也许是有差异的,我的版本如下:
class Darknet(nn.Module):
# YOLOv3 object detection model
def __init__(self, cfg, img_size=(416, 416), verbose=False):
super(Darknet, self).__init__()
self.module_defs = parse_model_cfg(cfg)
self.module_list, self.routs = create_modules(self.module_defs, img_size, cfg)
self.yolo_layers = get_yolo_layers(self)
# torch_utils.initialize_weights(self)
# Darknet Header https://github.com/AlexeyAB/darknet/issues/2914#issuecomment-496675346
self.version = np.array([0, 2, 5], dtype=np.int32) # (int32) version info: major, minor, revision
self.seen = np.array([0], dtype=np.int64) # (int64) number of images seen during training
self.info(verbose) if not ONNX_EXPORT else None # print model description
self.header_info = np.array([0, 0, 0, self.seen, 0], dtype=np.int32)
def forward(self, x, augment=False, verbose=False):
....darknet代码
这里只需要在Darknet类多加一个save_darknet_weights方法
def save_darknet_weights(self, path, cutoff=-1):
"""
@:param path - path of the new weights file
@:param cutoff - save layers between 0 and cutoff (cutoff = -1 -> all are saved)
"""
fp = open(path, "wb")
# self.header_info[3] = self.seen
# self.header_info.tofile(fp)
header_info = np.array([0, 2, 0, 32013312, 0], dtype=np.int32)
header_info.tofile(fp)
# Iterate through layers
for i, (module_def, module) in enumerate(zip(self.module_defs[:cutoff], self.module_list[:cutoff])):
if module_def["type"] == "convolutional":
conv_layer = module[0]
# If batch norm, load bn first
if module_def["batch_normalize"]:
bn_layer = module[1]
bn_layer.bias.data.cpu().numpy().tofile(fp)
bn_layer.weight.data.cpu().numpy().tofile(fp)
bn_layer.running_mean.data.cpu().numpy().tofile(fp)
bn_layer.running_var.data.cpu().numpy().tofile(fp)
# Load conv bias
else:
conv_layer.bias.data.cpu().numpy().tofile(fp)
# Load conv weights
conv_layer.weight.data.cpu().numpy().tofile(fp)
fp.close()
最后,我们通过定义weights_export.py文件来调用这个方法。
"""
把pth文件转化成.weights文件
"""
import torch
from models import Darknet
from train_module import prepare_parse_test_config, print_args
weights_path = "./weights_test/best.pt"
config = prepare_parse_test_config("config.yaml")
print_args(config)
net = Darknet(config["cfg"], 416)
data = torch.load(weights_path, map_location=torch.device('cpu'))
net.load_state_dict(data["model"])
net.save_darknet_weights("./weights_test/best.weights")
调用完成以后就可以进行模型的转换了。这里我们的思路主要是加载完模型以后,然后调用即可,注意不用版本的加载模型可能有稍微区别,大家稍微适配一下自己的代码即可。
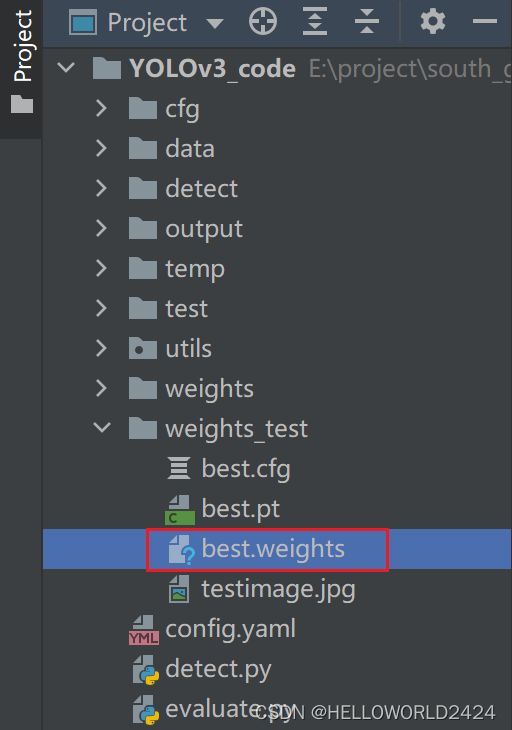
上面是我经过转换后输出的weights模型。
3. Darknet weights模型 —— caffemodel
这一步,可以参考一下我之前写的文档:
YOLOv4 darknet模型转换成caffemodel再转om在Atlas服务器上面推理
样例上面说的是YOLOv4,其实YOLOv3的操作步骤是一模一样的,按照上面帖子的内容完成转换即可。其中,不同于Altas服务器的适配,转换输出的caffemodel,以及prototxt文件是不需要做任何修改的。
4. Caffemodel —— wk模型
这一步就比较复杂了,需用用到海思的IDE叫做RuyiStudio,使用之前,需要先按照好MingGW-W64编译器,关于编译器的按照,可以参考《HiSVP 开发指南.pdf》,MingGW-W64需要安装7.3.0版本,按照配好就可以打开IDE了。
新建并且配置环境
设置芯片类型
我们新建一个projects,新建完成以后第一步需要选择设备的芯片,我们是Hi3519AV100,设置如下图所示:

设置指令仿真模式
需要设置指令仿真模式,仿真时候才会使用指令模型,指令仿真模式的设置如下图:

准备数据文件
我们再项目目录下新建一个temp文件夹,准备好需要的文件:

其中,有刚刚生成的caffemodel文件,6c_dataset是有用于量化的数据图片,一般从训练数据集中抽10多张图出来就可以了,inst文件夹用于存放转换输出文件。其余的文件说明如下:
image_ref_list.txt

里面填写用于量化模型的数据路径,一张一张图填下来即可。
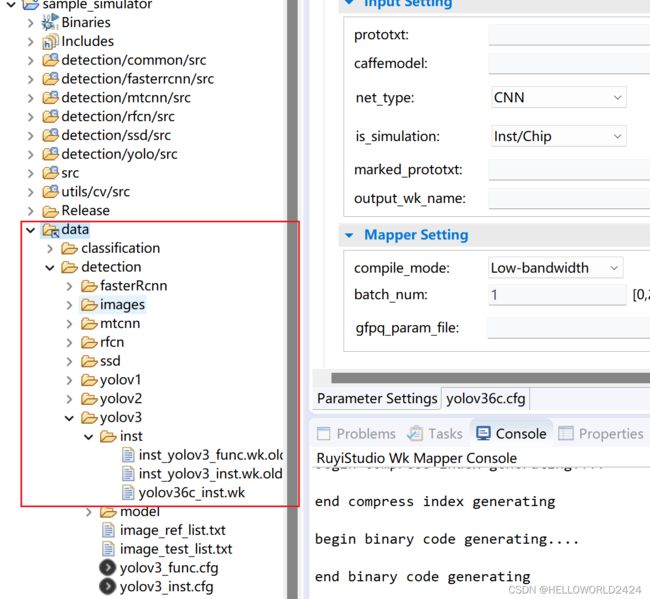
yolov36c.cfg
从project默写的配置文件复制出来,具体的设置如下,其中需要强调的是,生成的是inst指令模型,图片通道顺序是RGB模式,等,其他参数见图:

开始量化生成wk量化文件
上面这些参数都调整完成以后,我们就可以开始量化了,点击下面的量化开始按钮执行模型的量化。

稍等大概1分钟,模型的量化就完成了,wk模型就会生成在inst目录中。
生成了inst文件如下面所示:

5. 仿真
数据准备
为了验证wk模型是否可用,我们需要对模型进行仿真,在海思Hi3519A V100R001C02SPC010.rar文件里面有一个sample_stimulator的项目,可用用于仿真,我们先在下面的目录放好我们的模型文件。
图片列表与bgr图片生成
如上图yolov3下面的image_test_list.txt,需要修改仿真所用的图片,图片的格式是bgr,关于如何使用jpg图片去生成bgr图片,这里就不展开了,这里直接给出Python版本的代码:
# -*- coding: UTF-8 -*-
# author: AnnSun
# date :2020.05.12
import cv2
def jpg2bgr(jpg_path, save_img_size, save_bgr_path):
"""
把jpg文件转换成
:param save_bgr_path:
:param jpg_path:
:param save_img_size:
:return:
"""
img = cv2.imread(jpg_path)
if img is None:
print("img is none")
else:
img = cv2.resize(img, (save_img_size, save_img_size))
(B, G, R) = cv2.split(img)
with open(save_bgr_path, 'wb') as fp:
for i in range(save_img_size):
for j in range(save_img_size):
fp.write(B[i, j])
# print(B[i, j])
for i in range(save_img_size):
for j in range(save_img_size):
fp.write(G[i, j])
for i in range(save_img_size):
for j in range(save_img_size):
fp.write(R[i, j])
print("save success")
def bgr2jpg(bgr_path, imgsize, blank_path):
"""查看bgr文件内容并显示为图片"""
f = open(bgr_path, 'rb')
src = cv2.imread(blank_path)
src = cv2.resize(src, (imgsize, imgsize))
print(src.shape)
print(f.name)
(B, G, R) = cv2.split(src)
data = f.read(imgsize * imgsize * 3)
for j in range(imgsize):
for i in range(imgsize):
B[j, i] = data[j * imgsize + i]
G[j, i] = data[j * imgsize + i + imgsize * imgsize]
R[j, i] = data[j * imgsize + i + imgsize * imgsize * 2]
newimg = cv2.merge([B, G, R])
cv2.imshow("new", newimg)
f.close()
cv2.waitKey(0)
我们修改image_test_list.txt如下,图片放在相对应的位置就可以了。

修改代码
在sample_simulator/src/SvpSampleDetectionOneSeg.cpp文件中的第31行,改成我们的模型yolov36c_inst.wk。
#ifndef USE_FUNC_SIM /* inst wk */
const HI_CHAR *g_paszModelName_d[] = {
"../../data/detection/yolov1/inst/inst_yolov1_inst.wk",
"../../data/detection/yolov2/inst/inst_yolov2_inst.wk",
"../../data/detection/yolov3/inst/yolov36c_inst.wk",
"../../data/detection/ssd/inst/inst_ssd_inst.wk"
};
在sample_simulator/include/SvpSampleYolo.h文件中从54行修改如下的参数。
/* YOLO V3 */
#define SVP_SAMPLE_YOLOV3_SRC_WIDTH (416) // 入网尺寸
#define SVP_SAMPLE_YOLOV3_SRC_HEIGHT (416)
#define SVP_SAMPLE_YOLOV3_GRIDNUM_CONV_82 (19) // feature map 1 输出的长宽
#define SVP_SAMPLE_YOLOV3_GRIDNUM_CONV_94 (38) // feature map 2 输出的长宽
#define SVP_SAMPLE_YOLOV3_GRIDNUM_CONV_106 (76) // feature map 3 输出的长宽
#define SVP_SAMPLE_YOLOV3_CHANNLENUM (33) // (num_class + 5) * 3
#define SVP_SAMPLE_YOLOV3_PARAMNUM (11) // num_class + 5
#define SVP_SAMPLE_YOLOV3_BOXNUM (3) // 不用改
#define SVP_SAMPLE_YOLOV3_CLASSNUM (6) // num_class
#define SVP_SAMPLE_YOLOV3_MAX_BOX_NUM (10)
#define SVP_SAMPLE_YOLOV3_SCORE_FILTER_THREASH (0.5f) // 置信度阈值
#define SVP_SAMPLE_YOLOV3_NMS_THREASH (0.45f) // nms阈值
在sample_simulator/src/SvpSampleYolov3.cpp中,第十行,修改anchor的数值:
static HI_DOUBLE s_SvpSampleYoloV3Bias[SVP_SAMPLE_YOLOV3_SCALE_TYPE_MAX][6] = {
{116,90, 156,198, 373,326},
{30,61, 62,45, 59,119},
{10,13, 16,30, 33,23}
};
这里需要注意的一点是小的feature map是对应大的anchor的,SvpSampleYolo.h上面的feature map是从小往大的写,所以anchor是从大往小的写。
开始仿真
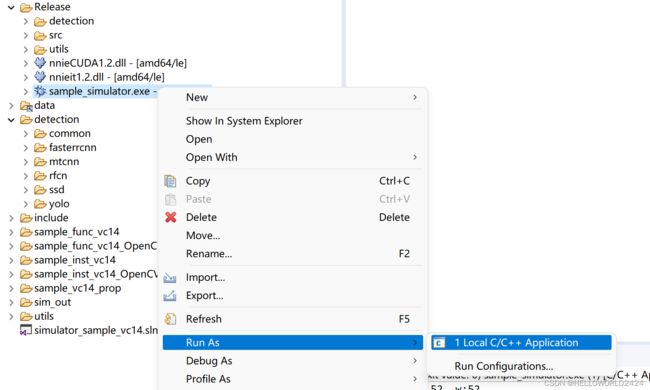
首先在编译的按钮下面选择release版本,然后点击编译,系统就会对项目进行编译了。

编译完成以后我们就可以运行Release文件夹下面的sample_simulator.exe文件,进行仿真。仿真的过程比较久,大概需要10分钟运行完成。
运行结束以后的输出如下所示。
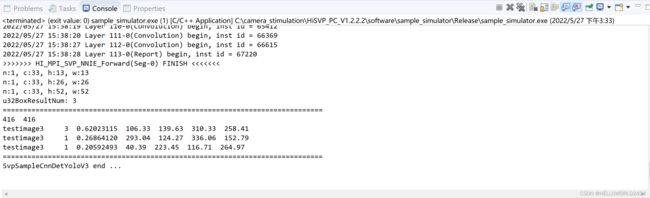
我们可以在**sample_simulator/sim_out/result_SVP_SAMPLE_YOLO_V3/**文件夹中查看仿真的输出结果了:
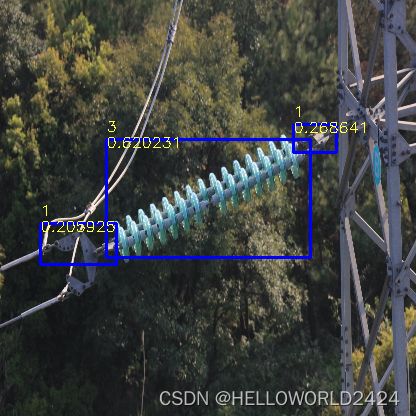
上面的仿真结果是,值得注意的是,上面输出的候选框坐标是对resize后入网尺寸而定的,如果需要原图的坐标,就需要做映射回去。
好了以上是本期分享的全部内容了,如果你觉得对你还有帮助,建议点赞分享并收藏哦。如果大家想对我表示肯定,扫描下面的二维码即可哦,原创不易,一分钱也是爱哦。
