ROS-创建点云数据并在Rviz中显示
环境:
Ubuntu16.04
ROS kinetic
C++
1.新建ROS工作空间
mkdir -p PointCloundShow_ws/src
cd PointCloundShow_ws/src
catkin_init_workspace
cd ..
catkin_make
将工作空间下的setup.bash文件路径添加到Home路径下的.bashrc文件中:
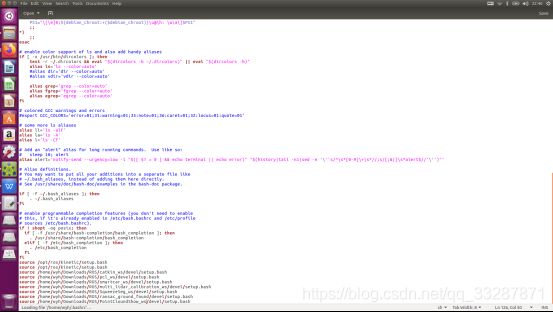
这样就不用每次都source一下了.
2.创建功能包
cd src
catkin_create_pkg pointcloundshow pcl_ros roscpp rospy sensor_msgs std_msgs
在功能包的src文件夹下新建cpp文件pcl_create.cpp
#include 然后将下面的编译规则写到功能包的CMakeLists.txt文件中
find_package(PCL REQUIRED)
include_directories(include${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_executable(pcl_create src/pcl_create.cpp)
target_link_libraries(pcl_create ${catkin_LIBRARIES} ${PCL_LIBRARIES})

回到工作空间路径下输入catkin_make进行编译
依次打开新的终端分别运行下面的指令:
roscore
rosrun pointcloundshow pcl_create
rviz
打开rviz
在rviz中增加PointCloud2d
topic 选 /pcl_output
fixed Frame 输入odom
如图
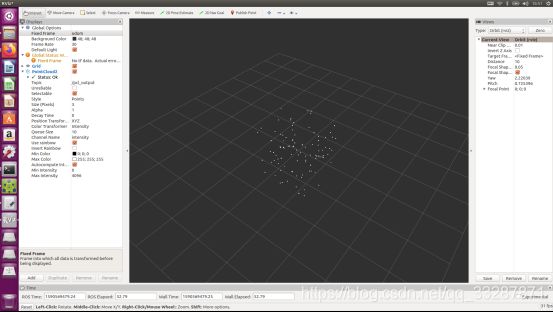

手动创建正方体八个角点,理解点云的空间意义:
代码:
#include 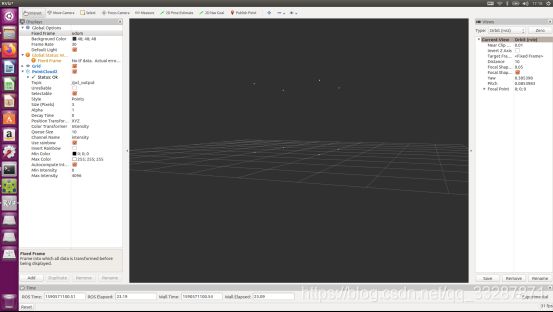
利用循环嵌套,创建一个正方体
#include 

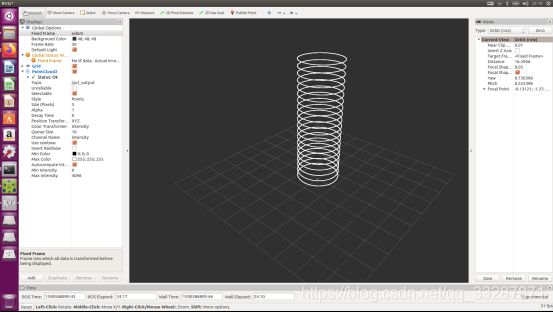
创建一个圆柱体:
#include (z);目地在于int转换为float
}
}
//Convert the cloud to ROS message
pcl::toROSMsg(cloud, output);
output.header.frame_id = "odom";
ros::Rate loop_rate(1);
while (ros::ok())
{
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}