Halcon九点及旋转标定流程
参考文章:剖析Halcon 9点标定旋转中心标定与使用_william9987的博客-CSDN博客_halcon旋转标定
一、XY轴九点标定:
使用仿射变换:
夹具夹取产品或者标定块,选取一个特征,开始进行标定
X轴、Y轴移动一个位置,记录轴的物理坐标:(Qx1,Qy1)
提取图像中对应特征点,图像像素坐标:(Px1,Py1)
运动第N位置,记录下点位轴轴坐标(QxN,QyN),t提取像素坐标:(PxN,PyN)
使用vector_to_hom_mat2d (Px, Py, Qx , Qy, HomMat2D)得到图像坐标和世界坐标的转换关系矩阵。这种简单的标定方法不能消除镜头和相机畸变。
*创建空数组用来存放模板在图像坐标系的位置
ImageXPix:=[]
ImageYPix:=[]
*****************************
*确定好相机移动的九个物理坐标数组
WorldX:=[8,8,8,0,0,0,-8,-8,-8]
WorldY:=[-8,0,8,8,0,-8,-8,0,8]
*开始标定
i:=0
* 打开相机
open_framegrabber ('GigEVision', 0, 0, 0, 0, 0, 0, 'default', -1, 'default', -1, 'false', 'default', 'ccd1', 0, -1, AcqHandle)
grab_image_start (AcqHandle, -1)
*采集图像 获取9个像素坐标
for i:=1 to 9 by 1
grab_image (Image, AcqHandle)
*用第一张图片创建模板
if(i=1)
disp_message(3600, '创建模板区域,右键确定', 'window', 12, 12, 'red', 'false')
draw_region(Region, 3600)
reduce_domain(Image, Region, ImageReduced)
create_shape_model(ImageReduced, 'auto', rad(-180), rad(360), 'auto', 'auto', 'use_polarity', 'auto', 'auto', ModelID)
endif
find_shape_model(Image, ModelID, rad(-180), rad(360), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score)
if(|Row|>0)
dev_display_shape_matching_results(ModelID, 'red', Row, Column, Angle, 1, 1, 0)
*将位置添加到数组
ImageXPix:=[ImageXPix,Column]
ImageYPix:=[ImageYPix,Row]
else
disp_message(3600, '模板创建失败', 'window', 30, 12, 'red', 'false')
endif
stop()
endfor
close_framegrabber (AcqHandle)
*计算对应点的仿射变换矩阵
vector_to_hom_mat2d(ImageYPix, ImageXPix, WorldY, WorldX, HomMat2D)
******************
*保存和读取标定好的仿射矩阵
write_tuple (HomMat2D, 'C:/Users/LZj/Desktop/hm.tup')
read_tuple ('C:/Users/LZj/Desktop/hm.tup', HomMat2D)
***********应用*************
*打开串口,与运动程序通讯
open_serial ('COM2', SerialHandle)
*close_serial(SerialHandle)
set_serial_param (SerialHandle, 9600, 8, 'none', 'none', 1, 1000, 'unchanged')
i:=0
open_framegrabber ('GigEVision', 0, 0, 0, 0, 0, 0, 'default', -1, 'default', -1, 'false', 'default', 'ccd1', 0, -1, AcqHandle)
grab_image_start (AcqHandle, -1)
while(true)
grab_image (Image, AcqHandle)
get_image_size(Image, Width, Height)
if(i=0)
i:=1
draw_region(Region1, 3600)
reduce_domain(Image, Region1, ImageReduced1)
create_shape_model(ImageReduced1, 'auto', rad(-180), rad(360), 'auto', 'auto', 'use_polarity', 'auto', 'auto', ModelID)
endif
find_shape_model(Image, ModelID, rad(-180), rad(360), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score)
if(Score>0)
dev_display_shape_matching_results (ModelID, 'red', Row, Column, Angle, 1, 1, 0)
*将图像中心的像素坐标仿射得到物理坐标Qy1, Qx1
affine_trans_point_2d (HomMat2D, Height/2-1, Width/2-1, Qy1, Qx1)
*将找到的模板中心的像素坐标仿射得到物理坐标Qy2, Qx2
affine_trans_point_2d (HomMat2D, Row, Column, Qy2, Qx2)
*求出相机中心和模板中心之间的物理距离差
string_send:='go2:'+(Qx1-Qx2)+','+(Qy1-Qy2)+',0'
*将这个物理距离差通过串口发送给运动控制程序,让相机中心移动到模板的中心位置
write_serial (SerialHandle, ords(string_send))
try
while(1)
*获得鼠标的能力 1表示鼠标左键 4表示鼠标右键
get_mbutton (3600, Row3, Column3, Button)
if(Button=1)
grab_image (Image, AcqHandle)
find_shape_model (Image, ModelID, -0.39, 0.78, 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score)
if(Score>0)
dev_display (Image)
dev_set_color ('green')
gen_cross_contour_xld (Cross1, Height/2-1, Width/2-1, 6, 0)
dev_set_color ('red')
gen_cross_contour_xld (Cross, Row, Column, 15,rad(45))
*验证相机中心和模板中心是否基本重合
affine_trans_point_2d (HomMat2D, Row, Column, Qy2, Qx2)
string_send:='go2:'+(Qx1-Qx2)+','+(Qy1-Qy2)+',0'
disp_message (3600, string_send, 'window', 12, 12, 'black', 'true')
endif
endif
if(Button=4)
break
endif
endwhile
catch (Exception)
endtry
endif
endwhile
二、旋转轴标定:
参考一、http://www.elecfans.com/d/1601708.html
参考二、http://t.csdn.cn/fZgi9
1、相机固定,物体在轴上旋转
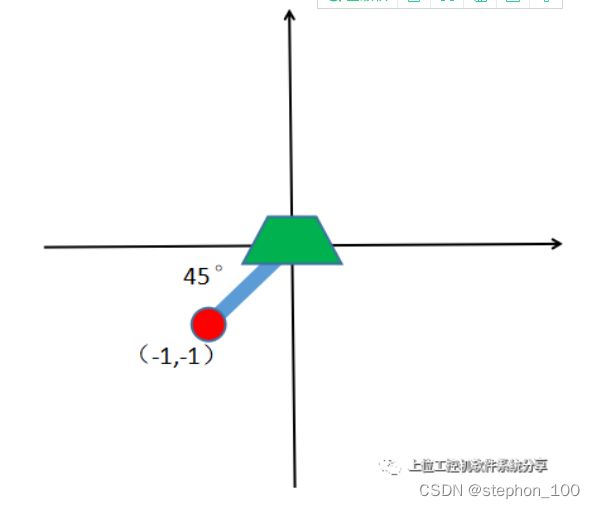
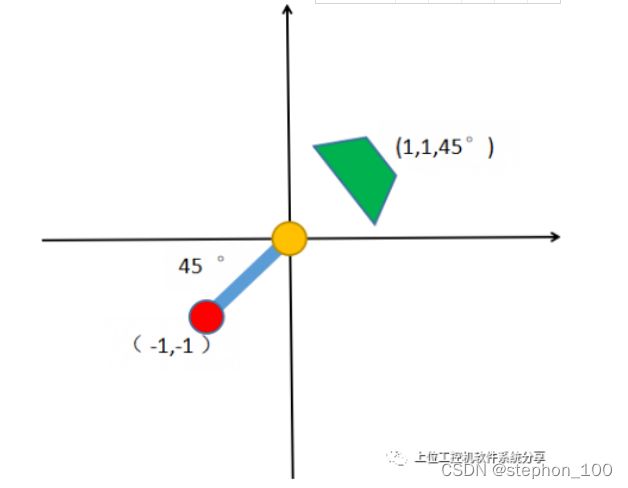
红点为目标物体的旋转中心,物体的标准基准取料位置为图左位置,实际取料位置为右图。相比基准位置偏移XYR(1,1,45°)
先把XY方向补偿了,只观察旋转轴的旋转过程就可以了。上图是旋转前。
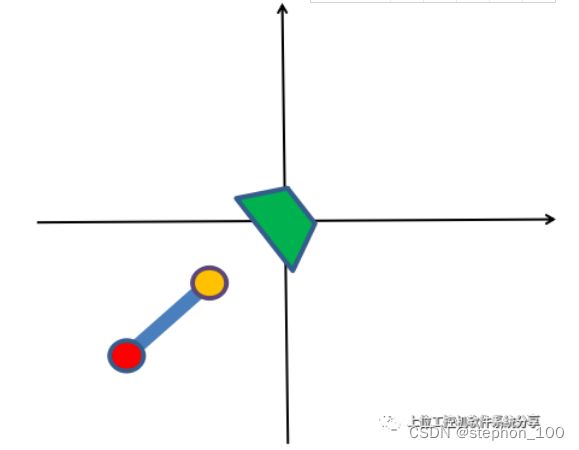
旋转后:
可以看到按旋转中心转正物体角度后会产生一个∆x和∆y的偏移。
只要算出来∆x和∆y,加上之前的xy的偏移就可以实现定位纠偏了。
在相机定位做补偿的流程中,我们的已知条件是:
1、当前物体的特征中心点(图2)。2、标定时拍照的特征中心点,作为基准点(图1)
通过抓边知道:3、当前物体的倾斜角度(图2)。4、标定的基准角度(图1)。
5、物体的旋转中心(通过旋转标定获取)。
以上已知条件中1、3是当前物体拍照获得的。2、4、5是标定流程中获得。旋转标定的目的主要就是得到条件5、旋转中心。
有了旋转中心和偏移角度(条件3-条件2),以及物体实际的位置(条件1)就可以算出将物体按旋转中心转正角度后xy方向上的偏移∆x和∆y。再加上xy的偏移就实现了定位补偿。
通过轴旋转多个角度在图像坐标系上获得多个点,使用halcon算子拟合圆得到旋转中心坐标的旋转半径R。
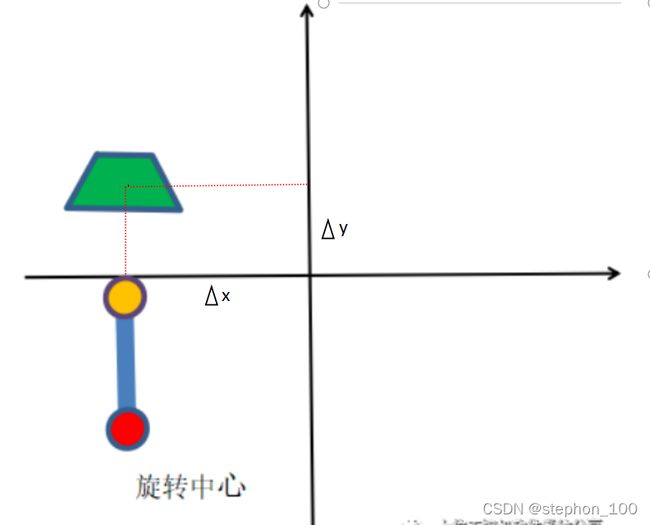
∆x和∆y的计算公式:
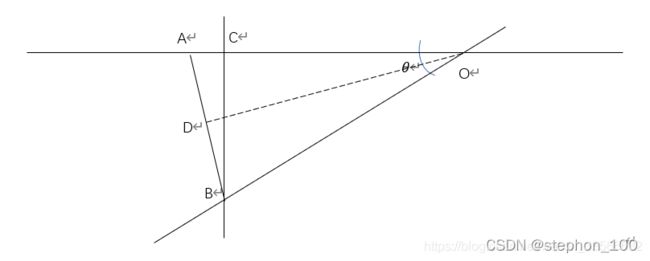
如图:通过标定旋转中心O坐标和旋转半径R已知。旋转角度需要补偿θ已知,求∆x=AC,∆y=BC。
因为三角形ABC和三角形AOD是相似三角形,所以有:
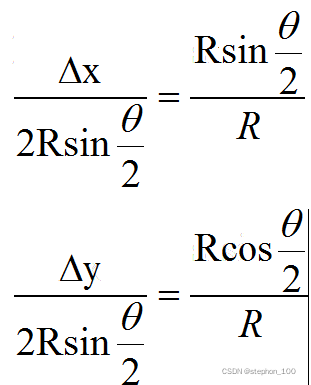
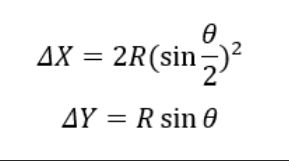
这样就计算出了旋转后的∆x和∆y偏移,也就实现了补偿。