基于pytorch的胶囊网络minst图像分类实现
关于《Dynamic Routing Between Capsules》这篇论文的代码复现网上有很多,基本都是做图像重构的。我修改了其中一部分代码,实现了minst图像分类。
参考:基于pytorch的CapsNet代码详解.
胶囊网络结构

胶囊网络基本结构如下:
- 普通卷积层conv1
- 预胶囊层PrimaryCaps:为胶囊层做准备,运算为卷积运算。
- 胶囊层DigitCaps:代替全连接层,输出为10个胶囊。
图像重构和图像分类不同的是,胶囊层后面还接了一个decoder层,将输出的胶囊转化为图像,所以前面的代码都是一样的。下面我们直接来看分类的实现。
package
import torch
from torch import nn
from torch.optim import Adam
import torch.nn.functional as F
from torchvision import transforms, datasets
import time
dataset
def load_mnist(path='./data', download=False, batch_size=100, shift_pixels=2):
"""
Construct dataloaders for training and test data. Data augmentation is also done here.
:param path: file path of the dataset
:param download: whether to download the original data
:param batch_size: batch size
:param shift_pixels: maximum number of pixels to shift in each direction
:return: train_loader, test_loader
"""
kwargs = {'num_workers': 1, 'pin_memory': True}
train_loader = torch.utils.data.DataLoader(
datasets.MNIST(path, train=True, download=download,
transform=transforms.ToTensor()),
batch_size=batch_size, shuffle=True, **kwargs)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST(path, train=False, download=download,
transform=transforms.ToTensor()),
batch_size=batch_size, shuffle=True, **kwargs)
return train_loader, test_loader
model
1)Sqush激活函数

def squash(inputs, axis=-1):
"""
The non-linear activation used in Capsule. It drives the length of a large vector to near 1 and small vector to 0
:param inputs: vectors to be squashed
:param axis: the axis to squash
:return: a Tensor with same size as inputs
"""
norm = torch.norm(inputs, p=2, dim=axis, keepdim=True)
scale = norm**2 / (1 + norm**2) / (norm + 1e-8)
return scale * inputs
此函数用来将verctor(胶囊就是vector)的长度(范数)压缩到0和1之间,axis=-1表示压缩倒数第一维。
2) PrimaryCapsule
class PrimaryCapsule(nn.Module):
"""
Apply Conv2D with `out_channels` and then reshape to get capsules
:param in_channels: input channels
:param out_channels: output channels
:param dim_caps: dimension of capsule
:param kernel_size: kernel size
:return: output tensor, size=[batch, num_caps, dim_caps]
"""
def __init__(self, in_channels, out_channels, dim_caps, kernel_size, stride=1, padding=0):
super(PrimaryCapsule, self).__init__()
self.dim_caps = dim_caps
self.conv2d = nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, stride=stride, padding=padding)
def forward(self, x):
outputs = self.conv2d(x)
outputs = outputs.view(x.size(0), -1, self.dim_caps)
return squash(outputs)
预胶囊层:
- num_caps是胶囊个数,dim_caps是胶囊维度。
- output size为[batch, num_caps, dim_caps]。
3) DenseCapsule
class DenseCapsule(nn.Module):
"""
The dense capsule layer. It is similar to Dense (FC) layer. Dense layer has `in_num` inputs, each is a scalar, the
output of the neuron from the former layer, and it has `out_num` output neurons. DenseCapsule just expands the
output of the neuron from scalar to vector. So its input size = [None, in_num_caps, in_dim_caps] and output size = \
[None, out_num_caps, out_dim_caps]. For Dense Layer, in_dim_caps = out_dim_caps = 1.
:param in_num_caps: number of cpasules inputted to this layer
:param in_dim_caps: dimension of input capsules
:param out_num_caps: number of capsules outputted from this layer
:param out_dim_caps: dimension of output capsules
:param routings: number of iterations for the routing algorithm
"""
def __init__(self, in_num_caps, in_dim_caps, out_num_caps, out_dim_caps, routings=3):
super(DenseCapsule, self).__init__()
self.in_num_caps = in_num_caps
self.in_dim_caps = in_dim_caps
self.out_num_caps = out_num_caps
self.out_dim_caps = out_dim_caps
self.routings = routings
self.weight = nn.Parameter(0.01 * torch.randn(out_num_caps, in_num_caps, out_dim_caps, in_dim_caps))
def forward(self, x):
x_hat = torch.squeeze(torch.matmul(self.weight, x[:, None, :, :, None]), dim=-1)
x_hat_detached = x_hat.detach()
# The prior for coupling coefficient, initialized as zeros.
# b.size = [batch, out_num_caps, in_num_caps]
b = torch.zeros(x.size(0), self.out_num_caps, self.in_num_caps)
assert self.routings > 0, 'The \'routings\' should be > 0.'
for i in range(self.routings):
# c.size = [batch, out_num_caps, in_num_caps]
c = F.softmax(b, dim=1)
# At last iteration, use `x_hat` to compute `outputs` in order to backpropagate gradient
if i == self.routings - 1:
# c.size expanded to [batch, out_num_caps, in_num_caps, 1 ]
# x_hat.size = [batch, out_num_caps, in_num_caps, out_dim_caps]
# => outputs.size= [batch, out_num_caps, 1, out_dim_caps]
outputs = squash(torch.sum(c[:, :, :, None] * x_hat, dim=-2, keepdim=True))
# outputs = squash(torch.matmul(c[:, :, None, :], x_hat)) # alternative way
else: # Otherwise, use `x_hat_detached` to update `b`. No gradients flow on this path.
outputs = squash(torch.sum(c[:, :, :, None] * x_hat_detached, dim=-2, keepdim=True))
# outputs = squash(torch.matmul(c[:, :, None, :], x_hat_detached)) # alternative way
# outputs.size =[batch, out_num_caps, 1, out_dim_caps]
# x_hat_detached.size=[batch, out_num_caps, in_num_caps, out_dim_caps]
# => b.size =[batch, out_num_caps, in_num_caps]
b = b + torch.sum(outputs * x_hat_detached, dim=-1)
return torch.squeeze(outputs, dim=-2)
这一步即胶囊层DigitCaps。
- input size:[batch, in_num_caps, in_dim_caps],经x[: , None , : , : , None]扩展后维度为[batch, 1, in_num_caps, in_dim_caps, 1]。
- torch.matmul将扩展后的输入和weight 相乘后得 [batch, out_num_caps, in_num_caps,out_dim_caps, 1],压缩后得 [batch,out_num_caps,in_num_caps,out_dim_caps]。
torch.matmul()用法介绍. - 动态路由算法部分:
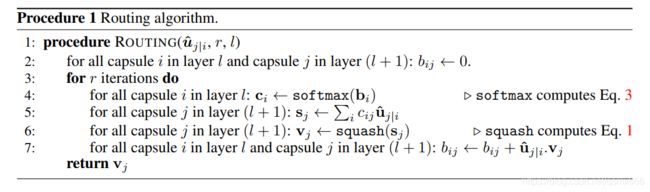
- 前几次迭代用的是x_hat_detached(切断反向传播),最后一次用的是x_hat,原因只有最后一次迭代得到的胶囊才会用作下一层的输入,需要加到计算图里。
- outputs size为[batch, out_num_caps, in_num_caps]。胶囊之间相连接。
4)CapsuleNet
class CapsuleNet(nn.Module):
"""
A Capsule Network on MNIST.
:param input_size: data size = [channels, width, height]
:param classes: number of classes
:param routings: number of routing iterations
Shape:
- Input: (batch, channels, width, height), optional (batch, classes) .
- Output:((batch, classes), (batch, channels, width, height))
"""
def __init__(self, input_size, classes, routings):
super(CapsuleNet, self).__init__()
self.input_size = input_size
self.classes = classes
self.routings = routings
# Layer 1: Just a conventional Conv2D layer
self.conv1 = nn.Conv2d(
input_size[0], 256, kernel_size=9, stride=1, padding=0)
# Layer 2: Conv2D layer with `squash` activation, then reshape to [None, num_caps, dim_caps]
self.primarycaps = PrimaryCapsule(
256, 256, 8, kernel_size=9, stride=2, padding=0)
# Layer 3: Capsule layer. Routing algorithm works here.
self.digitcaps = DenseCapsule(in_num_caps=32*6*6, in_dim_caps=8,
out_num_caps=classes, out_dim_caps=16, routings=routings)
self.relu = nn.ReLU()
def forward(self, x, y=None):
x = self.relu(self.conv1(x))
x = self.primarycaps(x)
x = self.digitcaps(x)
length = x.norm(dim=-1)
return length
Capsulenet类是前面各个module的组合。最终的输出是10个胶囊的范数。
train
计算准确率的函数:
def evaluate_accuracy(data_iter, net):
acc_sum, n = 0.0, 0
with torch.no_grad():
for X, y in data_iter:
if isinstance(net, torch.nn.Module):
net.eval() # 评估模式, 这会关闭dropout
acc_sum += (net(X).argmax(dim=1) == y).float().sum().item()
net.train() # 改回训练模式
else:
if('is_training' in net.__code__.co_varnames): # 如果有is_training这个参数
# 将is_training设置成False
acc_sum += (net(X, is_training=False).argmax(dim=1) == y).float().sum().item()
else:
acc_sum += (net(X).argmax(dim=1) == y).float().sum().item()
n += y.shape[0]
return acc_sum / n
训练过程:
def train(train_iter, test_iter, net, loss, optimizer, num_epochs):
batch_count = 0
for epoch in range(num_epochs):
train_l_sum, train_acc_sum, n, start = 0.0, 0.0, 0, time.time()
for X, y in train_iter:
y_hat = net(X)
l = loss(y_hat, y)
optimizer.zero_grad()
l.backward()
optimizer.step()
train_l_sum += l.item()
train_acc_sum += (y_hat.argmax(dim=1) == y).sum().item()
n += y.shape[0]
batch_count += 1
test_acc = evaluate_accuracy(test_iter, net)
print(
'epoch %d, loss %.4f, train acc %.3f, test acc %.3f, time %.1f sec'
% (epoch + 1, train_l_sum / batch_count, train_acc_sum / n,
test_acc, time.time() - start))
batch_size, lr, num_epochs = 100, 0.001, 5
# load dat
train_iter, test_iter = load_mnist('./data', download=False, batch_size=batch_size)
# define model
net = CapsuleNet(input_size=[1, 28, 28], classes=10, routings=3)
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
train(train_iter, test_iter, net, loss, optimizer, num_epochs)
result

训练时长再破记录,一个epoch就跑了两个多小时,我已经没有耐心等它跑完了。不过胶囊网络的确有这个特点,参数少,但训练慢。
效果其实很明显了,两个epoch准确率就达到了98.3%。
论文里给出的数据如下:

错误率0.25%,比CNN表现好。
ps:关于代码细节可以去看我参考的那篇博客和源代码,里面讲的挺详细的。