论文阅读笔记 之 3D Bounding Box Estimation Using Deep Learning and Geometry
目录
-
- 一、 解决的主要问题
- 二、 预备知识
- 三、 论文内容:
- 四、 CNN估计3D box参数:
-
- 4.1 偏航角回归
- 4.2 网络结构
- 4.3 损失函数
-
- 4.3.1 回归角度部分的损失函数
- 4.3.2 尺寸回归部分的损失函数
- 五、 实验
-
- 5.1 数据增强
- 5.2 结果展示
发表时间及期刊/会议 : 2017 CVPR
论文地址:https://arxiv.org/abs/1612.00496
一、 解决的主要问题
单目图像实现3D目标检测
已有条件/输入: 相机的内参矩阵K, 单目相机图像
需要求的结果:3D bounding box 的中心,尺寸,方向,即:
中心坐标: t_x, t_y, t_z,
尺寸: d_x, d_y, d_z,
方向: 偏转角θ,(Φ, α :默认目标翻滚角与俯仰角为0)
二、 预备知识
对于相机坐标系中的任一目标,都可以通过旋转平移矩阵[R T]将该目标的目标坐标系转为相机坐标系, 即对于目标上的任意一点X_0,都可以通过乘以[R T]将该点的目标坐标系中的坐标转为在相机坐标系中的坐标。同时因为相机内参矩阵K已知,内参矩阵可以将相机坐标系坐标转为图像坐标系中的坐标。因此可以得到某一点在2D图像坐标系与目标坐标系中坐标的关系:
![]()
其中x = [x,y,1]为该点的图像齐次坐标,X_0 = [X,Y,Z,1]为该点在目标坐标系中的齐次坐标。
三、 论文内容:
现需要根据图像坐标以及相机内存矩阵反推X_0以及[R T],因为[R T]包含了目标的方向、中心坐标信息(都是相对于相机坐标系)
可以看出由于维度不同,并不能直接通过解方程组计算结果。因此需要选取几个参数利用神经网络对其进行估计。本论文作者使用神经网络来估计目标的尺寸d_x, d_y, d_z 以及 方向即偏转角θ。
因为3D bounding box的方差较小,并且与目标的类别信息密切相关,能够利用类别信息精确化尺寸。
至此坐标转换方程![]()
中仅剩下平移矩阵T中的3个参数未知,文章中并没有利用3D box的中心与2D box的中心对应(很多文章认为两者的中心是对应的)来计算,而是通过3D box的各个角点与2D bo的几何约束来计算。
论文中认为 2D边框的每一条边必然至少与3D边框的一个角点接触,并且在默认翻滚角与俯仰角均为0的情况下3D 边框的竖直的边一定是与2D框的竖直边框重合的,如下图所示
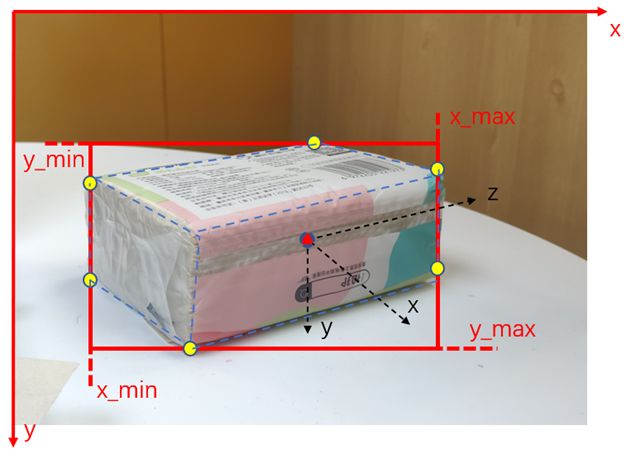
红框为2D检测框,黑色坐标系为目标坐标系,以右上角的角点为例可以得到:
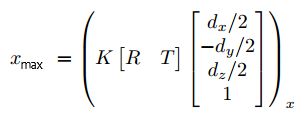
其中 (.)X 表示坐标的x维度的值,d_x, d_y, d_z分别为估计的3D边框的尺寸。同理可以得到关于x_max, y_min, y_max的方程,共4个方程,解该方程组即可得到剩下的3个未知量
(疑问:这就变成4个方程求解3个未知量了,维度反而多了一个,会不会出现冲突解,或者说是有一个多余的方程?)
(疑问:方程最后的角点选取是根据估计的偏转角来确定的?例如偏转角分别为45°、90°、135°时右上角的角点不是同一个角点,即在目标坐标系中的坐标也不同)
四、 CNN估计3D box参数:
4.1 偏航角回归
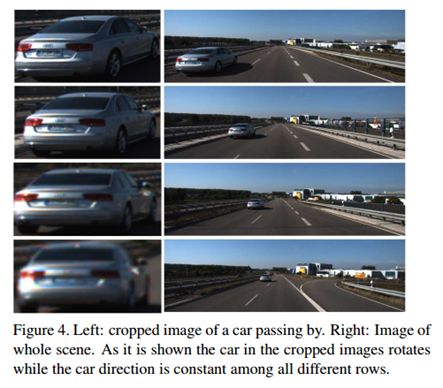
仅仅通过目标的图像估计其偏航角是不可能的,因为由下图可以看出,目标的偏航角保持固定的情况下,目标与观察点的相对位置不同也会导致目标的图像不同,这就造成不同图像对应GT相同,即多对一情况,这完全无法训练出准确的结果。
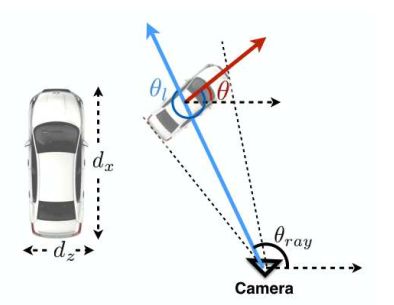
作者提到,目标的偏航角theta 与 目标中心和相机之间连线的角度theta_ray 以及 目标相对于相机的方向角theta_l之间存在
theta = theta_ray + theta_l 的关系,如下图所示,其中theta_ray直接通过目标偏离图像中心的距离计算得到
(疑问:感觉角度都是值(标量)的话,这里应该还要减360,即是 theta = theta_ray + theta_l-360°,文中并没有提到这几个角度的方向与正负的关系。。。)
论文中并没有直接回归theta_l,而是仿照目标检测中锚框这种离散化的设计,将角域(原文这里说的并不是很清楚)划分为n个有重叠的bin,然后预测目标theta_l 在每个bin的置信度以及偏移量△theta
(疑问:为什么要这么做?)
4.2 网络结构
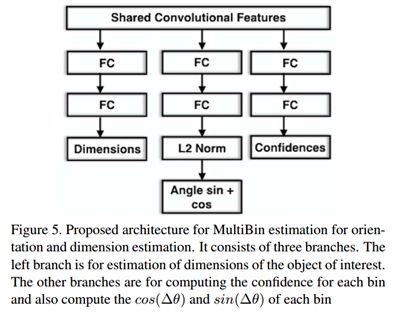
网络结构并没有什么创新点,简单来说就是在backbone后增加了三个全连接分支,分别用于预测
目标的尺寸、每个bin的角度偏移量(预测的是角度的余弦和正弦)、每个bin的置信度
4.3 损失函数
4.3.1 回归角度部分的损失函数

L_conf是每个bin的置信度的softmax loss。
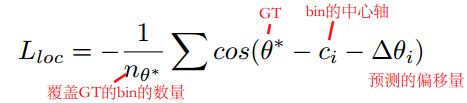
L_loc 是评估 预测角度与Ground Truth的差异的损失函数,如下式所示:
4.3.2 尺寸回归部分的损失函数
这一部分作者使用了L2损失函数,其形式如下

从这里看到尺寸部分也不是直接预测目标的尺寸,是基于预测的类别信息来对 GT与该类的平均尺寸的差进行回归的(相当于还是偏移量)。
最后总体的损失函数为上述两者的加权和:

五、 实验
5.1 数据增强
①为GT增加了一定程度的随机扰动(随机小幅度移动),相应地改变它的标注。目的是增加数据的多样性提升网络泛化能力。
②使用了色彩增强
③使用了镜像的数据增强方式
这里对实验细节等不作分析与记录,感兴趣的读者可以读原论文
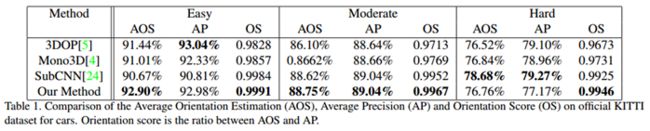
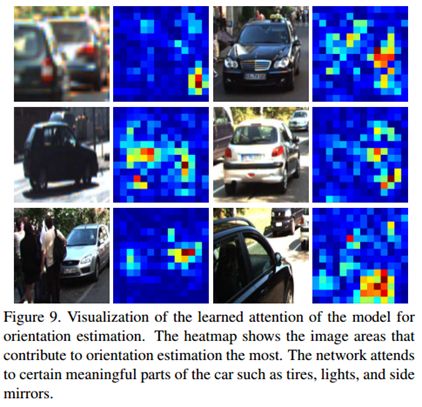
5.2 结果展示
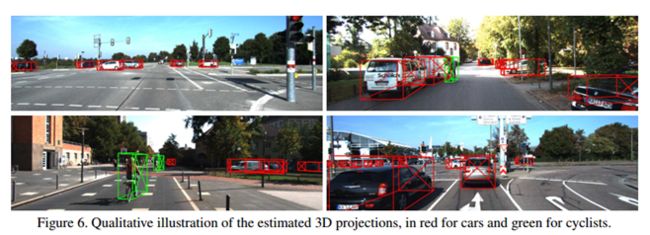
值得一提的是作者通过特征图与GT得到了热图来分析目标的哪一部分对结果影响较大,可以看出后视镜、车轮等部位对结果影响较大,或者说贡献较大。
最后,文中如有错误的地方请指正,希望大佬能够解答我的那几个疑惑点
