机器学习笔记-感知机对偶形式
文章目录
- 前言
- 一、感知机对偶形式
- 二、感知机对偶形式的实现
- 总结
前言
感知机模型是有两种形式的,上一篇文章中详细学习了感知机的原始形式数学模型,我们知道,感知机应该还有对偶形式,这篇文章就来记录一下感知机对偶形式的的数学模型。
一、感知机对偶形式
我们知道感知机的学习算法可以解释为:当一个实例点被误分类时,即位于分离超平面的错误一侧时,则根据这个误分类点来调整 w w w和 b b b的值,使分离超平面向误分类点的一侧移动,以减少该误分类点与超平面之间的距离,直到超平面能够越过该误分类点使其被正确分类。
从上面可以理解,超平面的学习是只与误分类点有关,在原始的感知机模型中,我们说使用梯度下降法来学习感知机,这种学习方式其实是逐步逐步进行学习,且推导过 w w w和 b b b这两个参数的迭代过程如下:
w ← w + η y i x i w \leftarrow w + \eta {y_i}{x_i} w←w+ηyixi
b ← b + η y i b\leftarrow b+\eta y_i b←b+ηyi
上述的迭代过程是如果有一次误分类点,就迭代一次,那我们可以假设样本点 ( x i , y i ) (x_i,y_i) (xi,yi)的误分类次数为 n i n_i ni,设样本点的个数为 N N N,就可以推导出 w w w和 b b b的表达式如下:
w = ∑ i = 1 N α i y i x i w = \sum\limits_{i = 1}^N {{\alpha _i}{y_i}{x_i}} w=i=1∑Nαiyixi
b = ∑ i = 1 N α i y i b = \sum\limits_{i=1}^N{{\alpha_i}{y_i}} b=i=1∑Nαiyi
其中 α i = n i η \alpha_i=n_i\eta αi=niη,这样我们就可以认为,只要找到所有样本点的更新次数,我们就能求出 w w w和 b b b。同时感知机的数学模型也就可以转换成如下形式:
s i g n ( x ) = s i g n ( w x + b ) = s i g n ( ∑ j = 1 N n j η y j x j ⋅ x + ∑ j = 1 N n j η y j ) sign(x)=sign(wx+b)=sign(\sum\limits_{j=1}^N{n_j\eta y_jx_j\cdot x+\sum\limits_{j=1}^N}{n_j\eta y_j}) sign(x)=sign(wx+b)=sign(j=1∑Nnjηyjxj⋅x+j=1∑Nnjηyj)
此时学习的目标就不是 w w w和 b b b了,而是 n i , i = 1 , 2 , 3 , ⋯ , N {n_i},i = 1,2,3, \cdots ,N ni,i=1,2,3,⋯,N。于是可以得到感知机对偶形式的学习算法如下:
- 初始化学习率 η = 0.1 \eta=0.1 η=0.1,令 n i {n_i} ni等于0,其中 i = 1 , 2 , 3 , ⋯ , N i=1,2,3,\cdots,N i=1,2,3,⋯,N;
- 在训练集中选取数据 ( x i , y i ) (x_i,y_i) (xi,yi);
- 如果 y i ( ∑ j = 1 N n j η y j x j ⋅ x i + ∑ j = 1 N n j η y j ) ≤ 0 y_i(\sum\limits_{j=1}^N{n_j\eta y_jx_j\cdot x_i}+\sum\limits_{j=1}^N{n_j\eta y_j})\le0 yi(j=1∑Nnjηyjxj⋅xi+j=1∑Nnjηyj)≤0,则 n i = n i + 1 n_i=n_i+1 ni=ni+1;
- 转至2,直到没有误分类点出现;
这里需要解释一下,判断是否是误分类点的依据前面已经说过了,就是:
y i ( w x i + b ) ≤ 0 y_i(wx_i+b)\le0 yi(wxi+b)≤0
这里只不过是把 ( w x i + b ) (wx_i+b) (wxi+b)换成 ( ∑ j = 1 N n j η y j x j ⋅ x i + ∑ j = 1 N n j η y j ) (\sum\limits_{j=1}^N{n_j\eta y_jx_j\cdot x_i}+\sum\limits_{j=1}^N{n_j\eta y_j}) (j=1∑Nnjηyjxj⋅xi+j=1∑Nnjηyj)
二、感知机对偶形式的实现
感知机的对偶形式,相比原始形式,其实最大的变化就是需要提前计算样本点的内积,也就说可以用一个矩阵提前存储样本点的内积:
G = [ x i ⋅ x j ] N × N G = {\left[ {{x_i} \cdot {x_j}} \right]_{N \times N}} G=[xi⋅xj]N×N
提前计算样本的内积可以为后续计算节省时间,这样可以大大提高效率。
代码如下:
%% 感知机
clc,clear
tic
% 随机初始化数据
random = unifrnd(1,5,40,2);
X = [random(1:20,:);random(21:40,:)+5];
scatter(X(1:20,1),X(1:20,2),'o','filled')
hold on
scatter(X(21:40,1),X(21:40,2),'o','filled')
y = [zeros(20,1)-1;ones(20,1)]; % y标签
learn_rate = 0.1; % 定义学习率
% 感知机进行线性分类_对偶形式
ni = zeros(length(X),1); % 记录每个样本误分类的次数
% 计算Gram矩阵
G = zeros(length(X),length(X));
for i = 1:length(X)
for j = 1:length(X)
G(i,j) = X(i,:) * X(j,:)';
end
end
while flag ~= length(X)
flag = 0;
for i =1:length(X) % 遍历所有样本点
if y(i)*(G(i,:)*(ni*learn_rate.*y)+learn_rate*ni'*y)<=0
ni(i) = ni(i)+1;
break; % 跳出循环
else
flag = flag + 1;
end
end
end
% 结果可视化
w = (learn_rate * ni .* y)' * X;
b = learn_rate * ni'* y;
k = - w(1) / w(2); % 求斜率
b = - b / w(2); % 求系数
n = 1:1:10;
m = k * n + b;
hold on
plot(n,m,'--')
grid on
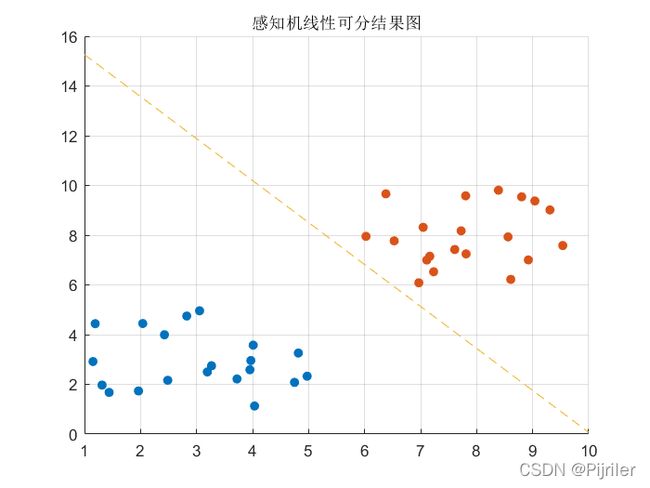
title('感知机线性可分结果图')
toc
结果如图:
总结
其实感知机的原始形式和对偶形式并没有本质的区别,对偶形式的意义就是可以提前计算样本点特征向量之间的内积,也就是Gram矩阵,这样在后续学习的过程中就可以加快计算速度。