柏林噪声(Perlin Noise)的matlab实现
柏林噪声(Perlin Noise)的matlab实现
柏林噪声是1983年Ken Perlin提出的噪声,用于模拟自然纹理,比如水波,手绘,火焰,大理石等纹路,也可以生成残蚀效果动态烟雾等各种常见特效。
根据计算机噪声产生的方法,可以分为梯度噪声和数值噪声,而柏林噪声就是梯度噪声最典型的代表之一。其中本文的算法和思路都来自于下面这篇博客,有兴趣的可以认真看一看这篇博客的内容。
【图形学】谈谈噪声
下面介绍一下一维、二维以及更高维度下柏林噪声(Perlin Noise)的matlab实现。
1.二维柏林噪声
二维柏林噪声是柏林噪声的基础,理解了二维柏林噪声之后有助于更快的实现其它维度的噪声。
算法的思路如下:
生成晶格点矩形网格
生成计算点网格,计算点网格范围要小于晶格点网格,而且要比晶格点网格更密。
给晶格点网格的格点生成随机单位圆梯度
分别计算每个计算点的数值:
确定计算点在在晶格中的位置,寻找该点所在的矩形网格的4个角点(晶格点)
分别计算每个角点对该计算点的影响:
计算该点与角点之间的方向向量
用方向向量与角点(晶格点)的梯度向量做点积
对四个点进行加权,得到该计算点的数值,使得数值在区域内平缓过渡
绘制噪声图谱
接下来用图片来介绍一下算法的实现思路:
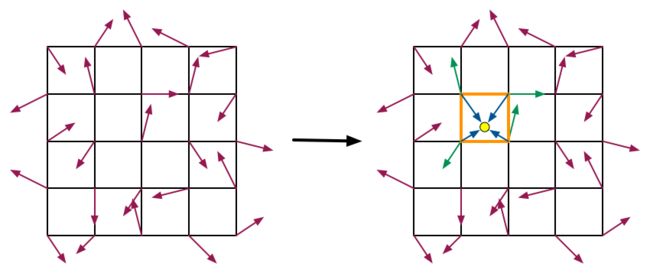
分别计算4个角点对该点的梯度影响:
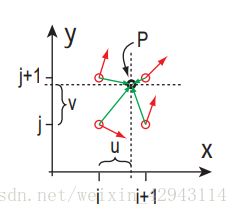

实际计算中,取整数点作为晶格点,用来生成各个梯度向量。其中u,v代表计算点的小数点部分,即x-floor(x)和y-floor(y)。之后用方向向量分别和对应的四个角点的梯度值做点积,生成n00, n10,n01和n11。n00代表和矩形左下角↙的梯度点的点积,n10代表右下角↘的点积,n01代表和左上角↖的点积,n11代表和右上角↗的点积。g代表各对应角点的梯度向量。
之后四个值加权处理。加权采用先x加权,后y加权。即先利用n00和n10加权为n0,再利用n01和n11加权为n1,这一步是x加权;之后再利用n0和n1加权为n,这一步是y加权。加权公式为:
n 0 = n 00 ( 1 − f ( u ) ) + n 10 f ( u ) \ n_0=n_{00} (1−f(u))+n_{10} f(u) n0=n00(1−f(u))+n10f(u)
n 1 = n 01 ( 1 − f ( u ) ) + n 11 f ( u ) \ n_1=n_{01} (1−f(u))+n_{11} f(u) n1=n01(1−f(u))+n11f(u)
n = n 0 ( 1 − f ( u ) ) + n 1 f ( u ) \ n=n_{0} (1−f(u))+n_{1} f(u) n=n0(1−f(u))+n1f(u)
一般 f ( u ) \ f(u) f(u)取 f ( 0 ) = 0 , f ( 0.5 ) = 0.5 , f ( 1 ) = 1 \ f(0)=0,f(0.5)=0.5,f(1)=1 f(0)=0,f(0.5)=0.5,f(1)=1的函数,低阶的可以取 f ( u ) = u \ f(u)=u f(u)=u,高阶的可以取:
f ( u ) = 3 u 2 − 2 u 3 \ f(u)=3u^2-2u^3 f(u)=3u2−2u3或者 f ( u ) = 6 u 5 − 15 u 4 + 10 u 3 \ f(u)=6u^5-15u^4+10u^3 f(u)=6u5−15u4+10u3,阶数越高图像平滑度越好,但是计算量越大。
接下来附上matlab代码
function zmat=perlinnoise2f(limx,limy,dx,dy)
%先定义变长大小,以及精度,以整数点为参考点。默认最小点为0。
% limx=[0 10];
% limy=[0 10];
% dx=1/16;
% dy=1/16;
% 公式的引用格式:zmat=perlinnoise2f([0 10],[0 10],1/16,1/16);
%第一步
%定义网格,以及各随机向量矩阵
minx=limx(1);maxx=limx(2);
miny=limy(1);maxy=limy(2);
numx=maxx-minx+1;
numy=maxy-miny+1;
numx_z=(maxx-minx)/dx+1;
numy_z=(maxy-miny)/dy+1;
[uxmat,uymat]=randxymat(numx+1,numy+1);%生成随机向量阵,注意边缘所以多了一行一列。参见后面的公式randxymat
zmat=zeros(numy_z,numx_z);%生成计算点网格,预设随机云图
j=0;
for x=minx:dx:maxx
j=j+1;%x坐标索引
k=0;
for y=miny:dy:maxy
k=k+1;%y坐标索引
%n00计算
ddx=x-floor(x);
ddy=y-floor(y);
ux=uxmat(floor(y)-miny+1,floor(x)-minx+1);
uy=uymat(floor(y)-miny+1,floor(x)-minx+1);
n00=GridGradient(ux,uy,ddx,ddy);%参见后面的公式GridGradient
%n10计算
ddx=x-floor(x)-1;
ddy=y-floor(y);
ux=uxmat(floor(y)-miny+1,floor(x)-minx+2);%注意边缘点数据关联问题,这就是前面多了一行一列的原因
uy=uymat(floor(y)-miny+1,floor(x)-minx+2);
n10=GridGradient(ux,uy,ddx,ddy);
%n01计算
ddx=x-floor(x);
ddy=y-floor(y)-1;
ux=uxmat(floor(y)-miny+2,floor(x)-minx+1);
uy=uymat(floor(y)-miny+2,floor(x)-minx+1);
n01=GridGradient(ux,uy,ddx,ddy);
%u11计算
ddx=x-floor(x)-1;
ddy=y-floor(y)-1;
ux=uxmat(floor(y)-miny+2,floor(x)-minx+2);
uy=uymat(floor(y)-miny+2,floor(x)-minx+2);
n11=GridGradient(ux,uy,ddx,ddy);
%然后再加权
n0=lerp(n00,n10,x-floor(x));%参见后面的
n1=lerp(n01,n11,x-floor(x));
zmat(k,j)=lerp(n0,n1,y-floor(y));%把最终数据n存储到相应的矩阵中
end
end
%把最终数值规划到0,1之间
zmat=zmat+0.5;
zmat(zmat>1)=1;zmat(zmat<0)=0;
% 生成图像
% [xmat,ymat]=meshgrid(minx:dx:maxx,miny:dy:maxy);
% figure
% pcolor(xmat,ymat,zmat)
% shading interp
end
function u=GridGradient(ux,uy,dx,dy)%数组相乘,其实就是点积,也可以用dot()函数替换
u=ux*dx+uy*dy;
end
function u=lerp(a,b,t)%权重相加
tw=6*t.^5-15*t.^4+10*t.^3;%6*t.^5-15*t.^4+10*t.^3;%3*t.^2-2*t.^3;%
u=(1-tw)*a + tw*b;
end
function [uxmat,uymat]=randxymat(numx,numy)%单位圆内随机向量
num=numx*numy;
uxmat=zeros(numy,numx);
uymat=zeros(numy,numx);
%采用不断生成随机向量,然后检测是否在单位圆内的方法。这个方法维度越高效率越低。
for j=1:num
k=0;
while k==0
randxy=rand(1,2);
if (randxy(1)-0.5)^2+(randxy(2)-0.5)^2<=0.25
k=k+1;
uxmat(j)=randxy(1);
uymat(j)=randxy(2);
end
end
end
uxmat=(uxmat-0.5)*2;%把随机向量调整为[-1,1]之间,这样生成的图像好看。
uymat=(uymat-0.5)*2;
end
上述函数引用的方法为:
limx=[0 10];
limy=[0 10];
dx=1/16;
dy=1/16;
zmat=perlinnoise2f(limx,limy,dx,dy);
figure
[xmat,ymat]=meshgrid(0:dx:limx(2),0:dy:limy(2));%划分网格
pcolor(xmat,ymat,zmat)
shading interp %删除线条
最终效果图如下:

2.基于二维perlin噪声的分型噪声(Fractal noise)
其实分形噪声可以理解为将不同尺度的基本噪声叠加到一起。
这种噪声通常纹理更细腻,而且还有一定的自相似性,无论是细节还是大尺度方面都有很好的随机性。
下面是利用上述第1节中perlin噪声生成的不同尺度的噪声,更改了limx和limy的上限。
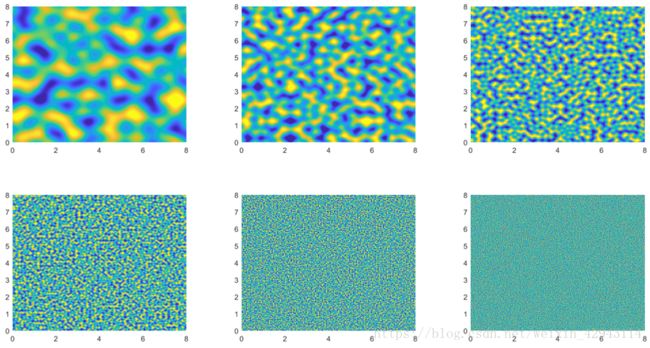
分型噪声的实现则是将上图中各个图像以一定权重比例加起来。由于为了保证不同尺度下zmat矩阵的可加性,最终计算点应该保持相同的数目,即limx和dx的变化要同倍数增长。以下是分型噪声的实现代码,用到了第一节中的simplexnoise2f.m函数。
maxx=4;maxy=4;%规定图像的范围上限
dx=1/64;dy=1/64;%规定图像的生成精度
%求出不同尺度下的zmat矩阵,注意要求不同zmat矩阵尺寸要相同
zmat1=simplexnoise2f([0 maxx],[0 maxy],dx,dy);
zmat2=simplexnoise2f([0 maxx*2],[0 maxy*2],dx*2,dy*2);
zmat3=simplexnoise2f([0 maxx*4],[0 maxy*4],dx*4,dy*4);
zmat4=simplexnoise2f([0 maxx*8],[0 maxy*8],dx*8,dy*8);
zmat5=simplexnoise2f([0 maxx*16],[0 maxy*16],dx*16,dy*16);
zmat6=simplexnoise2f([0 maxx*32],[0 maxy*32],dx*32,dy*32);
%绘制出当权重为0.5时的分型图像
figure(1)
q=0.5;
[xmat,ymat]=meshgrid(0:dx:maxx,0:dy:maxy);
subplot(2,3,1)
pcolor(xmat,ymat,zmat1)
shading interp
subplot(2,3,2)
pcolor(xmat,ymat,zmat1+zmat2*q)
shading interp
subplot(2,3,3)
pcolor(xmat,ymat,zmat1+zmat2*q+zmat3*q^2)
shading interp
subplot(2,3,4)
pcolor(xmat,ymat,zmat1+zmat2*q+zmat3*q^2+zmat4*q^3)
shading interp
subplot(2,3,5)
pcolor(xmat,ymat,zmat1+zmat2*q+zmat3*q^2+zmat4*q^3+zmat5*q^4)
shading interp
subplot(2,3,6)
pcolor(xmat,ymat,zmat1+zmat2*q+zmat3*q^2+zmat4*q^3+zmat5*q^4+zmat6*q^5)
shading interp
%绘制出当权重为1时的分型图像
figure(2)
q=1;
[xmat,ymat]=meshgrid(0:dx:maxx,0:dy:maxy);
subplot(2,3,1)
pcolor(xmat,ymat,zmat1)
shading interp
subplot(2,3,2)
pcolor(xmat,ymat,zmat1+zmat2*q)
shading interp
subplot(2,3,3)
pcolor(xmat,ymat,zmat1+zmat2*q+zmat3*q^2)
shading interp
subplot(2,3,4)
pcolor(xmat,ymat,zmat1+zmat2*q+zmat3*q^2+zmat4*q^3)
shading interp
subplot(2,3,5)
pcolor(xmat,ymat,zmat1+zmat2*q+zmat3*q^2+zmat4*q^3+zmat5*q^4)
shading interp
subplot(2,3,6)
pcolor(xmat,ymat,zmat1+zmat2*q+zmat3*q^2+zmat4*q^3+zmat5*q^4+zmat6*q^5)
shading interp
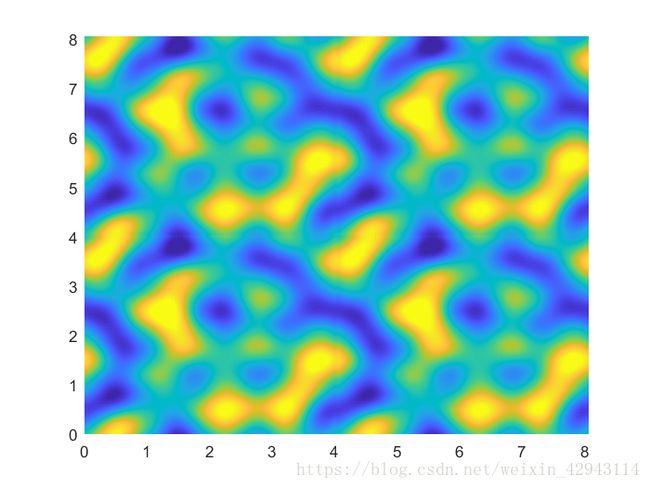
最终结果图如下所示:
这是权重取0.5的时候,从初始图到最终分型细节图

这是权重取1的时候,从初始图到最终分型细节图
可以看到即使是只改变权重也可以让图形最终效果变得完全不一样。
3.可平铺的柏林噪声
对于柏林噪声图像的产生只与初始的随机梯度向量有关。所以如果初始梯度向量一致,则噪声也一致;如果随机梯度向量沿一个方向不断重复,则最终图像也会不断地重复。
所以本文可平铺柏林噪声的思路就是在边界上重复之前边界,即左边边界和右边边界梯度相同,上边边界和下边边界梯度相同。接下来是可平铺噪声的代码,除了uxmat,uymat的定义与之前有所改变,其余关键代码均相同。
%先定义变长大小,以及精度,以整数点为参考点
limx=[0 4];
limy=[0 4];
dx=1/16;
dy=1/16;
%定义网格,以及各随机向量矩阵
minx=limx(1);maxx=limx(2);
miny=limy(1);maxy=limy(2);
numx=maxx-minx+1;
numy=maxy-miny+1;
numx_z=(maxx-minx)/dx+1;
numy_z=(maxy-miny)/dy+1;
[uxmat,uymat]=randxymat(numx+1,numy+1);%生成随机向量阵,注意边缘所以多了一行一列
%这里是可平铺的关键,把边缘设置成相同
uxmat([end-1,end],:)=uxmat([1,2],:);uymat([end-1,end],:)=uymat([1,2],:);
uxmat(:,[end-1,end])=uxmat(:,[1,2]);uymat(:,[end-1,end])=uymat(:,[1,2]);
%这里是可平铺的关键,把边缘设置成相同
zmat=zeros(numy_z,numx_z);%预设随机云图
j=0;
for x=minx:dx:maxx
j=j+1;
k=0;
for y=miny:dy:maxy
k=k+1;
%n00
ddx=x-floor(x);
ddy=y-floor(y);
ux=uxmat(floor(y)-miny+1,floor(x)-minx+1);
uy=uymat(floor(y)-miny+1,floor(x)-minx+1);
n00=GridGradient(ux,uy,ddx,ddy);
%n10
ddx=x-floor(x)-1;
ddy=y-floor(y);
ux=uxmat(floor(y)-miny+1,floor(x)-minx+2);
uy=uymat(floor(y)-miny+1,floor(x)-minx+2);
n10=GridGradient(ux,uy,ddx,ddy);
%n01
ddx=x-floor(x);
ddy=y-floor(y)-1;
ux=uxmat(floor(y)-miny+2,floor(x)-minx+1);
uy=uymat(floor(y)-miny+2,floor(x)-minx+1);
n01=GridGradient(ux,uy,ddx,ddy);
%u11
ddx=x-floor(x)-1;
ddy=y-floor(y)-1;
ux=uxmat(floor(y)-miny+2,floor(x)-minx+2);
uy=uymat(floor(y)-miny+2,floor(x)-minx+2);
n11=GridGradient(ux,uy,ddx,ddy);
%然后再加权
n0=lerp(n00,n10,x-floor(x));
n1=lerp(n01,n11,x-floor(x));
zmat(k,j)=lerp(n0,n1,y-floor(y));
end
end
zmat=zmat+0.5;
zmat(zmat>1)=1;zmat(zmat<0)=0;
%绘制两个周期的图像变化
[xmat,ymat]=meshgrid(minx:dx:2*maxx+dx,miny:dy:2*maxy+dy);
figure
pcolor(xmat,ymat,[zmat,zmat;zmat,zmat])
shading interp
function u=GridGradient(ux,uy,dx,dy)%数组相乘
u=ux*dx+uy*dy;
end
function u=lerp(a,b,t)%权重相加
tw=6*t.^5-15*t.^4+10*t.^3;%6*t.^5-15*t.^4+10*t.^3;%3*t.^2-2*t.^3;%
u=(1-tw)*a + tw*b;
end
function [uxmat,uymat]=randxymat(numx,numy)%单位圆内随机向量
num=numx*numy;
uxmat=zeros(numy,numx);
uymat=zeros(numy,numx);
for j=1:num
k=0;
while k==0
randxy=rand(1,2);
if (randxy(1)-0.5)^2+(randxy(2)-0.5)^2<=0.25
k=k+1;
uxmat(j)=randxy(1);
uymat(j)=randxy(2);
end
end
end
uxmat=(uxmat-0.5)*2;
uymat=(uymat-0.5)*2;
end
下图就是可平铺图像的实现,x和y方向各平铺扩展1倍:
4.一维噪声的实现
4.1一维柏林噪声
同二维柏林噪声相比,一维噪声每个计算点对应随机梯度点(晶格点)数只有2个,而且随机梯度也是1维的。
和二维相比,依然是6个主要环节:
1。设定计算点网格
2。设定梯度点网格坐标以及相应随机梯度
3。设定空矩阵存放计算点
4。计算每个计算点的数值
5。求出方向向量与梯度向量的点积
6。加权算出最终计算点结果
代码如下
%1设定计算点网格
limx=[0 10];
dx=1/64;
x=limx(1):dx:limx(2);
%2求出梯度点的坐标以及梯度
numx=diff(limx)+1;
uxmat=rand(1,numx+1)*2-1;
%3设立空矩阵存放计算点
numx_z=diff(limx)/dx+1;
zmat=zeros(1,numx_z);
%4计算各个计算点的数值
for j=1:length(x)
%5计算每个角点的点积
%n0
ddx=x(j)-floor(x(j));
ux=uxmat(1,floor(x(j))-limx(1)+1);
n0=(ux*ddx);
%n1
ddx=x(j)-floor(x(j))-1;
ux=uxmat(1,floor(x(j))-limx(1)+2);
n1=(ux*ddx);
%6加权
zmat(j)=lerp(n0,n1,x(j)-floor(x(j)));
end
zmat=zmat*2;
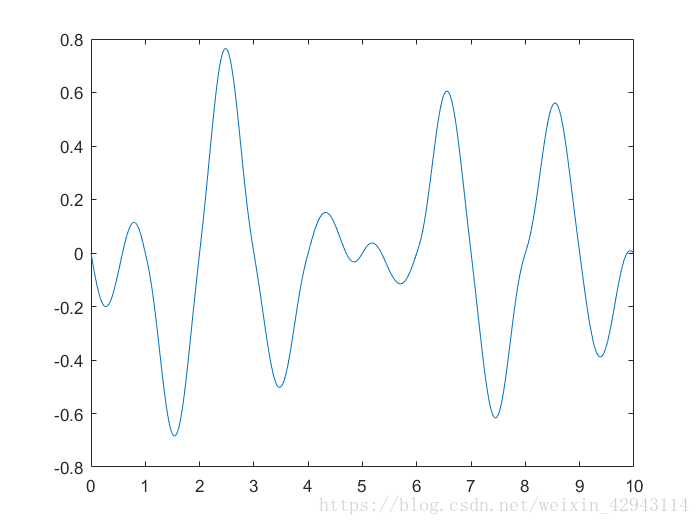
plot(x,zmat)
function u=lerp(a,b,t)%权重相加
tw=6*t.^5-15*t.^4+10*t.^3;%6*t.^5-15*t.^4+10*t.^3;%3*t.^2-2*t.^3;%
u=(1-tw)*a + tw*b;
end
图像如图所示
4.2动态一维柏林噪声
对于柏林噪声,所有动态n维噪声都可以用n+1维的柏林噪声来实现。具体实现方法就是就是把前n维当做图像,第n+1维当做时间轴进行变换。
在matlab里,如果已知一个二维柏林噪声矩阵zmat,可以依次画出矩阵每行的图像来进行一维噪声的实现。示意代码如下:
%实现动态1维函数的变化
% for j=1:numy_z
% plot(minx:dx:maxx,zmat(j,:));
% pause(0.2)%暂停功能,防止变化太快不显示
% end
这个道理也同样适用于动态2维噪声。
5.高维柏林噪声以及缺点
对于1维Perlin噪声,每个计算点只需要2个梯度点便可以计算;对于2维Perlin噪声,每个计算点需要包围这个点的矩形4角点来计算;对于3维,则需要8个立方体的角点梯度来计算;对于n维,则需要2^n个角点去计算每个点的数值,这大大增大了计算量。
因此Perlin本人于2002年又推出了一个新的梯度噪声计算方法,称为Simplex噪声。Simplex噪声就是解决Perlin噪声在高纬度下计算量指数型增大的这个问题而提出的,它的解决办法是化正方形网格为三角形网格。比如说,对于2维图形,Perlin噪声的正方形格点有4个,但是Simplex噪声的三角网格只有3个格点;对于3维图形,Perlin噪声的正方形格点有8个,但是Simplex噪声的三角网格只有4个格点(它的网格为正三棱锥);对于n维图形,Perlin噪声的正方形格点有2^n个,但是Simplex噪声的三角网格只有n+1个格点。