机器学习之梯度下降法详解
文章目录
- 一、数学基础
-
- 1.1 一元函数的导数
- 1.2 多元函数的偏导数和梯度
- 二、梯度下降法
-
- 2.1 简介
- 2.2 算法介绍
-
- 2.2.1 场景假设
- 2.2.2 梯度下降语言描述
- 2.2.3 梯度下降数学解释
- 2.3 实例
-
- 2.3.1 一元函数的梯度下降
- 2.3.2 多元函数的梯度下降
- 2.4. 代码实战
-
- 2.4.1 例1:使用梯度下降求函数 f ( x , y ) = x 2 + y 2 f(x,y)=x^2+y^2 f(x,y)=x2+y2 的最小值。
- 2.4.2 例2:用梯度下降法来拟合直线【线性回归】
- 三、梯度下降分类
-
- 3.1 批量梯度下降(Batch Gradient Descent,BGD)
- 3.2 随机梯度下降(Stochastic Gradient Descent, SGD)
- 3.3 小批量梯度下降(Mini-Batch Gradient Descent, MBGD)
- 四、参考
一、数学基础
1.1 一元函数的导数
在微积分中,函数 f ( x ) f(x) f(x)在点 x 0 x_0 x0处的导数定义为: f ′ ( x ) = lim x → x 0 f ( x ) − f ( x 0 ) x − x 0 f'(x) = \mathop {\lim }\limits_{x \to {x_0}} \frac{{f(x) - f({x_0})}}{{x - {x_0}}} f′(x)=x→x0limx−x0f(x)−f(x0),在几何上就是指 f ( x ) f(x) f(x)在 x 0 x_0 x0上的切线方向。
一般而言,计算函数 f ( x ) f(x) f(x)的最值,会令其导数为0,求解方程 f ′ ( x ) = 0 f'(x)=0 f′(x)=0,这么做可以得到函数的临界点,进一步判断是否最大或者最小。但是这不是最值得充要条件。这个临界点不一定是全局最大或者最小,也不一定是局部最大或者最小。比如函数 f ( x ) = x 3 f(x)=x^3 f(x)=x3,导数为0的点是 x = 0 x=0 x=0,这个点既不是局部最大也不是局部最小。
1.2 多元函数的偏导数和梯度
例如,对于多元函数 f ( x ) = f ( x 1 , . . . , x n ) f(x)=f(x_1,...,x_n) f(x)=f(x1,...,xn)来说,它的梯度可以定义为:
∇ f ( x ) = ( ∂ f ∂ x 1 ( x ) , . . . , ∂ f ∂ x n ( x ) ) \nabla f(x) = (\frac{{\partial f}}{{\partial {x_1}}}(x),...,\frac{{\partial f}}{{\partial {x_n}}}(x)) ∇f(x)=(∂x1∂f(x),...,∂xn∂f(x))
实际上,梯度就是多元微分的一般化。
举个例子来说,对于函数 f ( x ) = 0.5 + 5 x 1 − 2 x 2 + 11 x 3 f(x)=0.5+5x_1-2x_2+11x_3 f(x)=0.5+5x1−2x2+11x3来说,它的梯度为:
∇ f ( x ) = ⟨ ∂ f ∂ x 1 , ∂ f ∂ x 2 , ∂ f ∂ x 3 ⟩ = ⟨ 5 , − 2 , 11 ⟩ \nabla f(x) = \left\langle {\frac{{\partial f}}{{\partial {x_1}}},\frac{{\partial f}}{{\partial {x_2}}},\frac{{\partial f}}{{\partial {x_3}}}} \right\rangle = \left\langle {5, - 2,11} \right\rangle ∇f(x)=⟨∂x1∂f,∂x2∂f,∂x3∂f⟩=⟨5,−2,11⟩
从上面看出,梯度就是分别对每个变量进行微分,然后用逗号分割开,梯度是用 < > <> <>包括起来,说明梯度其实一个向量。
- 在一元函数中,梯度其实就是函数的微分,代表着函数在某个给定点的切线的斜率
- 在多元函数中,梯度是一个向量,向量有方向,梯度的方向就指出了函数在给定点的上升最快的方向。
即,从数学上的角度来看,梯度的方向是函数增长速度最快的方向,那么梯度的反方向就是函数减少最快的方向。如果想计算一个函数的最小值,就可以使用梯度下降法的思想来做。
二、梯度下降法
2.1 简介
一句话概括,梯度下降法就是一种寻找目标函数最小化的方法。
2.2 算法介绍
2.2.1 场景假设
假设这样一个场景:一个人被困在山上,需要从山上下来(找到山的最低点,也就是山谷)。但此时山上的浓雾很大,导致可视度很低;因此,下山的路径就无法确定,必须利用自己周围的信息一步一步地找到下山的路。这个时候,便可利用梯度下降算法来帮助自己下山。怎么做呢,首先以他当前的所处的位置为基准,寻找这个位置最陡峭的地方,然后朝着下降方向走一步,然后又继续以当前位置为基准,再找最陡峭的地方,再走直到最后到达最低处;同理上山也是如此,只是这时候就变成梯度上升算法了。

2.2.2 梯度下降语言描述
梯度下降的基本过程就和下山的场景很类似。
首先,我们有一个可微分的函数。这个函数就代表着一座山。我们的目标就是找到这个函数的最小值,也就是山底。根据之前的场景假设,最快的下山的方式就是找到当前位置最陡峭的方向,然后沿着此方向向下走,对应到函数中,就是找到给定点的梯度 ,然后朝着梯度相反的方向,就能让函数值下降的最快!因为梯度的方向就是函数变化最快的方向(数学基础中已经解释过)
所以,我们重复利用这个方法,反复求取梯度,最后就能到达局部的最小值,这就类似于我们下山的过程。而求取梯度就确定了最陡峭的方向,也就是场景中测量方向的手段。
梯度的方向是函数在给定点上升最快的方向,那么梯度的反方向就是函数在给定点下降最快的方向,这正是我们所需要的。所以我们只要沿着梯度的反方向一直走,就能走到局部的最低点!
2.2.3 梯度下降数学解释
首先给出数学公式:
Θ 1 = Θ 0 − α ∇ J ( Θ ) {\Theta ^1} = {\Theta ^0} - \alpha \nabla J(\Theta ) Θ1=Θ0−α∇J(Θ)
此公式的意义是: J J J是关于 Θ Θ Θ的一个函数,我们当前所处的位置为 Θ 0 Θ_0 Θ0点,要从这个点走到 J J J 的最小值点,也就是山底。首先我们先确定前进的方向,也就是梯度的反向,然后走一段距离的步长,也就是 α α α,走完这个段步长,就到达了 Θ 1 Θ_1 Θ1这个点!
(1)步长 α α α:
α α α 在梯度下降算法中被称作为学习率或者步长,意味着我们可以通过 α α α来控制每一步走的距离。 α α α 不能太大也不能太小,太小的话,可能导致迟迟走不到最低点,太大的话,会导致错过最低点!
(2)梯度要乘以一个负号
梯度前加一个负号,就意味着朝着梯度相反的方向前进。我们在前文提到,梯度的方向实际就是函数在此点上升最快的方向,而我们需要朝着下降最快的方向走,自然就是负的梯度的方向,所以此处需要加上负号;那么如果时上坡,也就是梯度上升算法,当然就不需要添加负号了。
2.3 实例
我们已经基本了解了梯度下降算法的计算过程,那么我们就来看几个梯度下降算法的小实例。
2.3.1 一元函数的梯度下降
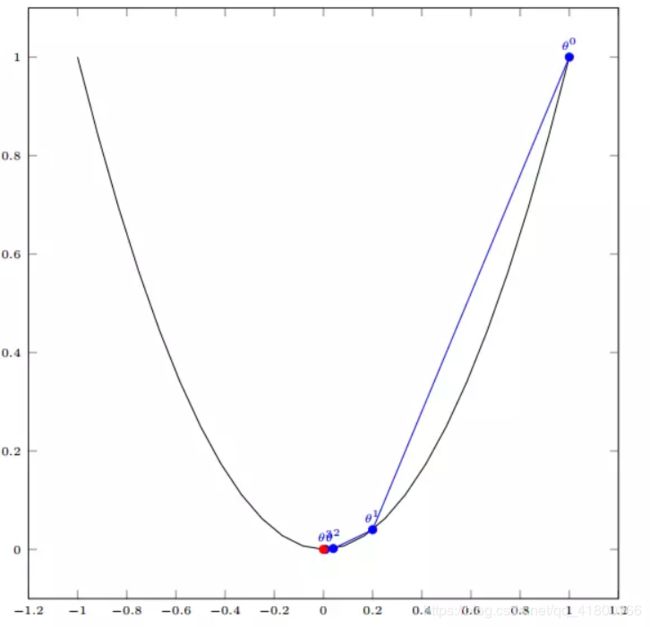
我们假设有一个单变量的函数 f ( x ) = x 2 f(x)=x^2 f(x)=x2,函数微分为 f ′ ( x ) = 2 x f'(x)=2x f′(x)=2x;
初始化起点假设为: x 0 = 1 x^0=1 x0=1,学习设置为 0.4 0.4 0.4,根据梯度下降的公式: Θ 1 = Θ 0 − α ∇ J ( Θ ) {\Theta ^1} = {\Theta ^0} - \alpha \nabla J(\Theta ) Θ1=Θ0−α∇J(Θ),我们计算梯度下降的迭代计算过程为:
x 0 = 1 x 1 = x 0 − α ∗ f ′ ( x 0 ) = 1 − 0.4 ∗ 2 ∗ 1 = 0.2 x 2 = x 1 − α ∗ f ′ ( x 1 ) = 0.2 − 0.4 ∗ 2 ∗ 0.2 = 0.04 x 3 = x 2 − α ∗ f ′ ( x 2 ) = 0.008 x 4 = x 3 − α ∗ f ′ ( x 3 ) = 0.0016 \begin{array}{l} {x^0} = 1\\ {x^1} = {x^0} - \alpha *f'({x^0}) = 1 - 0.4*2*1 = 0.2\\ {x^2} = {x^1} - \alpha *f'({x^1}) = 0.2 - 0.4*2*0.2 = 0.04\\ {x^3} = {x^2} - \alpha *f'({x^2}) = 0.008\\ {x^4} = {x^3} - \alpha *f'({x^3}) = 0.0016 \end{array} x0=1x1=x0−α∗f′(x0)=1−0.4∗2∗1=0.2x2=x1−α∗f′(x1)=0.2−0.4∗2∗0.2=0.04x3=x2−α∗f′(x2)=0.008x4=x3−α∗f′(x3)=0.0016
如图,经过四次的运算,也就是走了四步,基本就抵达了函数的最低点,也就是山底
2.3.2 多元函数的梯度下降
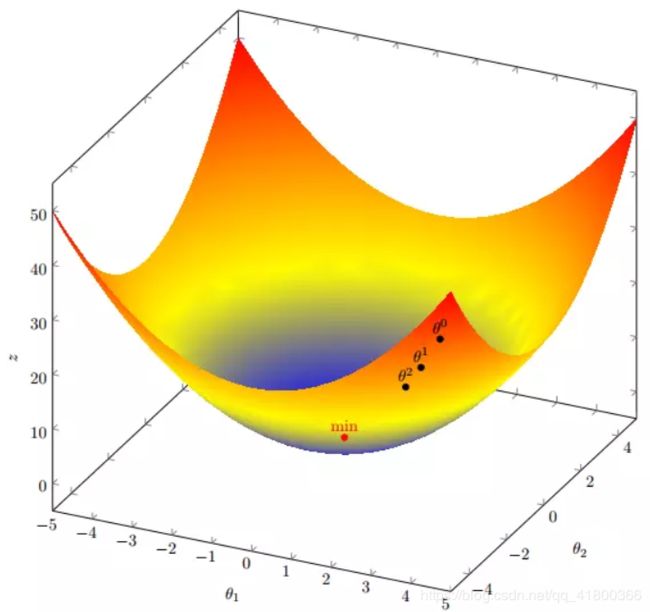
我们假设有一个目标函数: f ( x ) = x 1 2 + x 2 2 f(x)=x_1^2+x_2^2 f(x)=x12+x22
假设初始起点为: X 0 = ( 1 , 3 ) X^0=(1,3) X0=(1,3),初始学习率为: α = 0.1 \alpha=0.1 α=0.1,函数的梯度为: ∇ f ( X ) = ⟨ 2 x 1 , 2 x 2 ⟩ \nabla f(X) = \left\langle {2{x_1},2{x_2}} \right\rangle ∇f(X)=⟨2x1,2x2⟩
进行多次迭代:
X 0 = ( 1 , 3 ) X 1 = X 0 − α ∗ ∇ f ( X 0 ) = ( 1 , 3 ) − 0.1 ∗ ( 2 , 6 ) = ( 0.8 , 2.4 ) X 2 = X 1 − α ∗ ∇ f ( X 1 ) = ( 0.61 , 1.92 ) X 3 = ( 0.512 , 1.536 ) . . . . . . X 10 = ( 0.1074 , 0.3221 ) . . . . . . X 50 = ( 1.1418 e − 05 , 3.4254 e − 05 ) . . . . . . X 100 = ( 1.1629 e − 10 , 4.8888 e − 10 ) \begin{array}{l} {X^0} = (1,3)\\ {X^1} = {X^0} - \alpha *\nabla f({X^0}) = (1,3) - 0.1*(2,6) = (0.8,2.4)\\ {X^2} = {X^1} - \alpha *\nabla f({X^1}) = (0.61,1.92)\\ {X^3} = (0.512,1.536)\\ ......\\ {X^{10}} = (0.1074,0.3221)\\ ......\\ {X^{50}} = (1.1418{e^{ - 05}},3.4254{e^{ - 05}})\\ ......\\ {X^{100}} = (1.1629{e^{ - 10}},4.8888{e^{ - 10}}) \end{array} X0=(1,3)X1=X0−α∗∇f(X0)=(1,3)−0.1∗(2,6)=(0.8,2.4)X2=X1−α∗∇f(X1)=(0.61,1.92)X3=(0.512,1.536)......X10=(0.1074,0.3221)......X50=(1.1418e−05,3.4254e−05)......X100=(1.1629e−10,4.8888e−10)
我们发现,已经基本靠近函数的最小值点 ( 0 , 0 ) (0,0) (0,0)
2.4. 代码实战
2.4.1 例1:使用梯度下降求函数 f ( x , y ) = x 2 + y 2 f(x,y)=x^2+y^2 f(x,y)=x2+y2 的最小值。
首先求得函数的梯度:
def get_gradient(x, y):
return 2*x, 2*y
然后迭代:
def gradient_descent():
x, y = 5, 5 #起始位置
alpha = 0.01
epsilon = 0.3
grad = get_gradient(x, y)
while x**2+y**2 > epsilon**2:
x -= alpha*grad[0] # 沿梯度方向下降
y -= alpha*grad[1]
print("({},{})取值为{}".format(x, y, x**2+y**2) )
最后的结果:
(0.20000000000000104,0.20000000000000104)取值为0.08000000000000083
真实最小值在(0,0)点取得,最小值为0,两者非常接近(上面的epsilon设置的比较大,当epsilon很小时,最后的结果会非常接近0)。
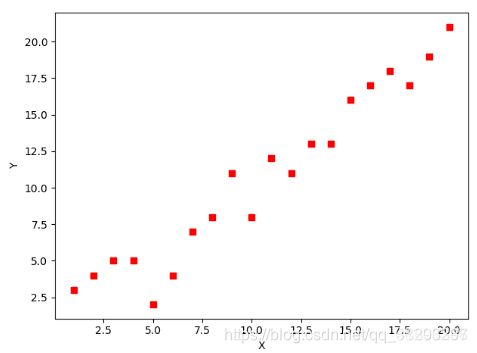
2.4.2 例2:用梯度下降法来拟合直线【线性回归】
假设有如下一系列点,如何用梯度下降法拟合出这条直线?
分析:可以定义一个代价函数,代价函数包括一个预测函数(预测值: y ′ = a x + b y'=ax+b y′=ax+b),预测函数含有待求解的直线方程的两个参数。通过梯度下降法求解这个函数的最小值得到参数。
首先,我们需要定义一个代价函数,在此我们选用均方误差代价函数(也称平方误差代价函数)
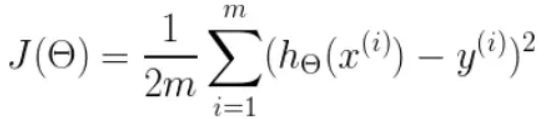
- m m m是数据集中数据点的个数,也就是样本数
- ½ ½ ½ 是一个常量,这样是为了在求梯度的时候,二次方乘下来的 2 2 2就和这里的 ½ ½ ½ 抵消了,自然就没有多余的常数系数,方便后续的计算,同时对结果不会有影响
- y y y是数据集中每个点的真实 y y y 坐标的值,也就是类标签
- h h h 是我们的预测函数(假设函数),根据每一个输入 x x x,根据 Θ Θ Θ 计算得到预测的 y y y 值,即

我们可以根据代价函数看到,代价函数中的变量有两个,所以是一个多变量的梯度下降问题,求解出代价函数的梯度,也就是分别对两个变量进行微分,即:
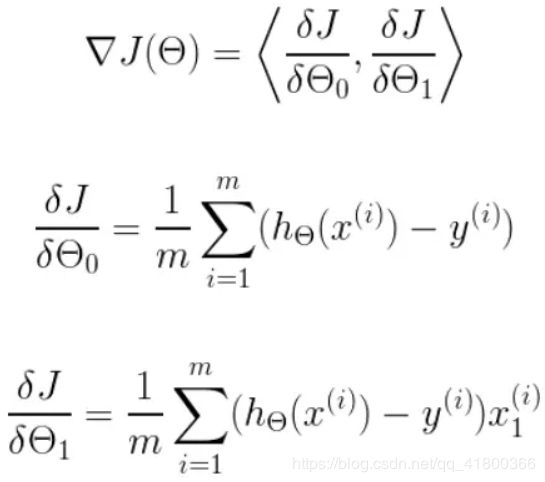
明确了代价函数和梯度,以及预测的函数形式。我们就可以开始编写代码了。
但在这之前,需要说明一点,就是为了方便代码的编写,我们会将所有的公式都转换为矩阵的形式,python中计算矩阵是非常方便的,同时代码也会变得非常的简洁。
为了转换为矩阵的计算,我们观察到预测函数的形式

我们有两个变量,为了对这个公式进行矩阵化,我们可以给每一个点 x x x 增加一维,这一维的值固定为 1 1 1,这一维将会乘到 Θ 0 Θ_0 Θ0 上。这样就方便我们统一矩阵化的计算:

然后我们将代价函数和梯度转化为矩阵向量相乘的形式:
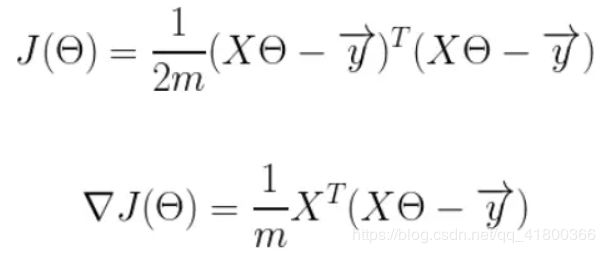
代码如下:
(1). 首先,我们需要定义数据集和学习率
from numpy import *
# 数据集大小 即20个数据点
m = 20
# x的坐标以及对应的矩阵
X0 = ones((m, 1)) # 生成一个m行1列的向量,也就是x0,全是1
X1 = arange(1, m+1).reshape(m, 1) # 生成一个m行1列的向量,也就是x1,从1到m
X = hstack((X0, X1)) # 按照列堆叠形成数组,其实就是样本数据
# 对应的y坐标
y = np.array([
3, 4, 5, 5, 2, 4, 7, 8, 11, 8, 12,
11, 13, 13, 16, 17, 18, 17, 19, 21
]).reshape(m, 1)
# 学习率
alpha = 0.01
(2). 接下来我们以矩阵向量的形式定义代价函数和代价函数的梯度
# 定义代价函数
def cost_function(theta, X, Y):
diff = dot(X, theta) - Y # dot() 数组需要像矩阵那样相乘,就需要用到dot()
return (1/(2*m)) * dot(diff.transpose(), diff)
# 定义代价函数对应的梯度函数
def gradient_function(theta, X, Y):
diff = dot(X, theta) - Y
return (1/m) * dot(X.transpose(), diff)
(3). 最后就是算法的核心部分,梯度下降迭代计算
# 梯度下降迭代
def gradient_descent(X, Y, alpha):
theta = array([1, 1]).reshape(2, 1)
gradient = gradient_function(theta, X, Y)
while not all(abs(gradient) <= 1e-5):
theta = theta - alpha * gradient
gradient = gradient_function(theta, X, Y)
return theta
optimal = gradient_descent(X, Y, alpha)
print('optimal:', optimal)
print('cost function:', cost_function(optimal, X, Y)[0][0])
当梯度小于1e-5时,说明已经进入了比较平滑的状态,类似于山谷的状态,这时候再继续迭代效果也不大了,所以这个时候可以退出循环!
(4). 运行代码,计算得到的结果如下:
print('optimal:', optimal) # 结果 [[0.51583286][0.96992163]]
print('cost function:', cost_function(optimal, X, Y)[0][0]) # 1.014962406233101
(5). 通过matplotlib画出图像
# 根据数据画出对应的图像
def plot(X, Y, theta):
import matplotlib.pyplot as plt
ax = plt.subplot(111) # 这是我改的
ax.scatter(X, Y, s=30, c="red", marker="s")
plt.xlabel("X")
plt.ylabel("Y")
x = arange(0, 21, 0.2) # x的范围
y = theta[0] + theta[1]*x
ax.plot(x, y)
plt.show()
plot(X1, Y, optimal)
所拟合出的直线如下
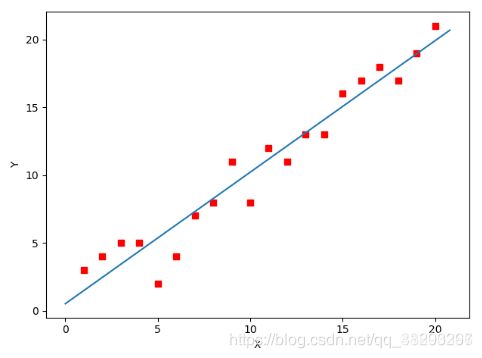
三、梯度下降分类
以线性回归为例,假设训练集为 T = ( x 1 , y 1 ) , ( x 2 , y 2 ) , . . . , ( x N , y N ) T={(x_1,y_1),(x_2,y_2),...,(x_N,y_N)} T=(x1,y1),(x2,y2),...,(xN,yN),其中 x i ∈ R n x_i \in R^n xi∈Rn是一个向量, y i ∈ R y_i \in R yi∈R。
我们通过学习得到了一个模型 f M ( x , w ) = ∑ j = 0 M w i x i f_M(x,w)=\sum\nolimits_{j = 0}^M {{w_i}{x^i}} fM(x,w)=∑j=0Mwixi,可以根据输入值 x x x 来预测 y y y, 预测值和真实值之间会有一定的误差,我们用均方误差(Mean Squared Error) MSE来表示:
L ( w ) = 1 2 N ∑ i = 1 N ( f M ( x i , w ) − y ) 2 L(w) = \frac{1}{{2N}}\sum\nolimits_{i = 1}^N {{{({f_M}({x_i},w) - y)}^2}} L(w)=2N1∑i=1N(fM(xi,w)−y)2
L ( w ) L(w) L(w) 被称为损失函数(loss function),加 1 / 2 1/2 1/2 的目的是为了计算方便, w w w 是一个参数向量。
根据梯度下降时使用数据量的不同,梯度下降可以分为3类:批量梯度下降(Batch Gradient Descent,BGD)、随机梯度下降(Stochastic Gradient Descent, SGD)和小批量梯度下降(Mini-Batch Gradient Descent, MBGD)。
3.1 批量梯度下降(Batch Gradient Descent,BGD)
批量梯度下降每次都使用训练集中的所有样本来更新参数,也就是
L ( w ) = 1 2 N ∑ i = 1 N ( f M ( x i , w ) − y ) 2 L(w) = \frac{1}{{2N}}\sum\nolimits_{i = 1}^N {{{({f_M}({x_i},w) - y)}^2}} L(w)=2N1∑i=1N(fM(xi,w)−y)2
更新方法为
w ( k + 1 ) = w ( k ) − α ∗ ∂ L ( w ) ∂ w {w^{(k + 1)}} = {w^{(k)}} - \alpha * \frac{{\partial L(w)}}{{\partial w}} w(k+1)=w(k)−α∗∂w∂L(w)
当样本数据集很大时,批量梯度下降的速度就会非常慢。
优点:可以得到全局最优解
缺点:训练时间长
3.2 随机梯度下降(Stochastic Gradient Descent, SGD)
每次梯度下降过程都使用全部的样本数据可能会造成训练过慢,随机梯度下降(SGD)每次只从样本中选择1组数据进行梯度下降,这样经过足够多的迭代次数,SGD也可以发挥作用,但过程会非常杂乱。“随机”的含义是每次从全部数据中中随机抽取一个样本。这样损失函数就变为:
L ( w ) = 1 2 ( f M ( x , w ) − y ) 2 L(w) = \frac{1}{{2}}{{{({f_M}({x},w) - y)}^2}} L(w)=21(fM(x,w)−y)2
参数更新方法同上:
w ( k + 1 ) = w ( k ) − α ∗ ∂ L ( w ) ∂ w {w^{(k + 1)}} = {w^{(k)}} - \alpha * \frac{{\partial L(w)}}{{\partial w}} w(k+1)=w(k)−α∗∂w∂L(w)
优点:训练速度快
缺点:准确度下降,得到的可能只是局部最优解
3.3 小批量梯度下降(Mini-Batch Gradient Descent, MBGD)
小批量梯度下降是 BGD 和 SGD 之间的折中,MBGD 通常包含 10-1000 个随机选择的样本。MBGD降低了了SGD训练过程的杂乱程度,同时也保证了速度。
(例子可以参见博客:https://www.cnblogs.com/sench/p/9817188.html)
四、参考
- https://blog.csdn.net/qq_41800366/article/details/86583789
- https://www.zhihu.com/question/305638940
- https://www.cnblogs.com/sench/p/9817188.html