ros地图的opencv处理(python)
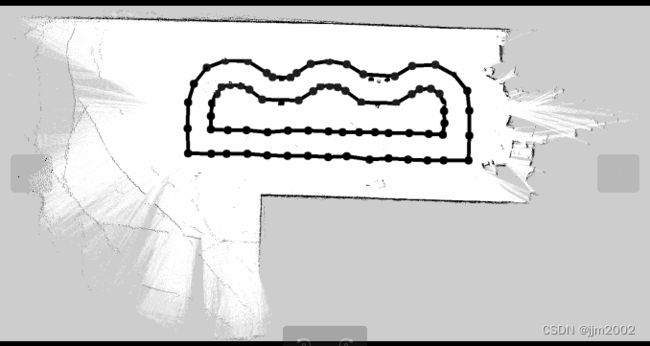
原图:
代码:
import cv2
import numpy as np
from PIL import Image
import rospy
class optimize:
def __init__(self):
rospy.init_node("popo2")
#==============可调参数========================================================================
self.pgmPath = rospy.get_param("pgmPath","/home/jjm1/noetic_in/auto/src/auto/map/mypgm.pgm")#文件路径
self.bias = rospy.get_param("bias",6)#清理框选到的曲线部分的多余点所需的偏置
self.bias1 = rospy.get_param("bias1",6)#曲线部分框选范围的偏置
self.bias2 = rospy.get_param("bias2",0)#曲线部分框选范围的偏置
self.bias3 = rospy.get_param("bias3",6)#曲线部分框选范围的偏置
self.center = []
self.im = self.read_img()
self.imC = self.im.copy()
self.all_on = rospy.get_param("all_on",int(self.im.shape[0]/8))#将所有需要的点框选的最小范围
self.all_back = rospy.get_param("all_back",int(7*self.im.shape[0]/15))#将所有需要的点框选的最小范围
self.all_left = rospy.get_param("all_left",int(self.im.shape[1]/4))#将所有需要的点框选的最小范围
self.all_right = rospy.get_param("all_right",int(24*self.im.shape[1]/33))#将所有需要的点框选的最小范围
self.outLeftBias = rospy.get_param("outLeftBias",23)#框选到的外层靠左部分的多余点所需的偏置
self.outRightBias = rospy.get_param("outRightBias",23)#框选到的外层靠右部分的多余点所需的偏置
self.outDownBias = rospy.get_param("outDownBias",23)#框选到的外层靠下部分的多余点所需的偏置
self.innLeftBias = rospy.get_param("innLeftBias",27)#框选到的内层靠左部分的多余点所需的偏置
self.innRightBias = rospy.get_param("innRightBias",30)#框选到的内层靠右部分的多余点所需的偏置
self.innDownBias = rospy.get_param("innDownBias",23)#框选到的内层靠下部分的多余点所需的偏置
self.lineThick = rospy.get_param("lineThick",8)#线宽
self.circleR = rospy.get_param("circleR",10)#圆的半径
#============================================================================================
#==============常参数=========================================================================
self.horizontal = 0#排序的维度
self.vertical = 1#排序的维度
self.largeSmall = "max_to_min"#排序的顺序
self.Smalllarge = "min_to_max"#排序的顺序
#============================================================================================
#=============获取所有点的坐标==================================================================
self.center = self.all(self.im)
#============================================================================================
#=============画出外圈的右边,左边,下边==========================================================
on1 = self.diff_sort(self.center,self.vertical,self.Smalllarge)[0][1]
length1,w1,h1 = self.strongLRD(self.Smalllarge,self.horizontal,self.outLeftBias)#外左
length2,w2,h2 = self.strongLRD(self.largeSmall,self.horizontal,self.outRightBias)#外右
length3,_1,_2 = self.strongLRD(self.largeSmall,self.vertical,self.outDownBias)#外下
#=============================================================================================
#==============画出内圈的右边,左边,下边=========================================================
w3,h3 = self.strong2LRD(self.Smalllarge,self.horizontal,length1,self.innLeftBias)#内左
w4,_ = self.strong2LRD(self.largeSmall,self.horizontal,length2,self.innRightBias)#内右
self.strong2LRD(self.largeSmall,self.vertical,length3,self.innDownBias)#内下
#=============================================================================================
#==============画出两条曲线=====================================================================
self.imC[h1-self.bias2:h3+self.bias3,w3:w4],_ = self.part(self.im[h1-self.bias2:h3+self.bias3,w3:w4])#内曲线
self.imC[on1:h1-self.bias1,w1:w2],center = self.part(self.im[on1:h1-self.bias1,w1:w2])#外曲线
center = self.diff_sort(center,self.horizontal,self.Smalllarge)
cv2.line(self.imC,(w1,h1),(w1+center[0][0],on1+center[0][1]),(0,0,0),thickness=self.lineThick)
cv2.circle(self.imC, (w1,h1), self.circleR, (0, 0, 0), -1)
cv2.line(self.imC,(w2,h2),(w1+center[len(center)-1][0],on1+center[len(center)-1][1]),(0,0,0),thickness=self.lineThick)
cv2.circle(self.imC, (w2,h2), self.circleR, (0, 0, 0), -1)
#=============================================================================================
#==============保存===========================================================================
self.imC = cv2.cvtColor(self.imC,cv2.COLOR_RGB2GRAY)
cv2.imwrite(self.pgmPath,self.imC)
print("结束")
#============================================================================================
#==========================读取图片====================================================================
def read_img(self):
im = Image.open(self.pgmPath) # 读取文件
im = cv2.cvtColor(np.asarray(im), cv2.COLOR_RGB2BGR)
return im
#=====================================================================================================
#==========================获取点=====================================================================
def all(self,im):
roi = self.im[self.all_on:self.all_back,self.all_left:self.all_right]
roi = cv2.medianBlur(roi,3)
kernel = np.ones((3,3), np.uint8)
self.im[self.all_on:self.all_back,self.all_left:self.all_right]= cv2.morphologyEx(roi,cv2.MORPH_ERODE,kernel)
mask,center,im = self.pic(im[self.all_on:self.all_back,self.all_left:self.all_right])
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for c in contours:
(x, y, w, h) = cv2.boundingRect(c)
cx,cy = int(x+self.all_left+w/2),int(self.all_on+y+h/2)
cv2.circle(self.im, (cx, cy), 2, (0, 0, 0), -1)
area = w*h
center.append([cx,cy,area])
center = self.diff_sort(center,self.horizontal,self.Smalllarge)
return center
#======================================================================================================
#=========================画外圈=======================================================================
def strongLRD(self,method,dir,bor_dis):
center= self.diff_sort(self.center,dir,method)
border = center[0][dir]
border_all = []
for i in center:
if abs(i[dir]-border)center[j][dir]
if cat==False:
center[i][:],center[j][:] = center[j][:],center[i][:]
return center
#==========================================================================================================
if __name__ == "__main__":
popo = optimize()
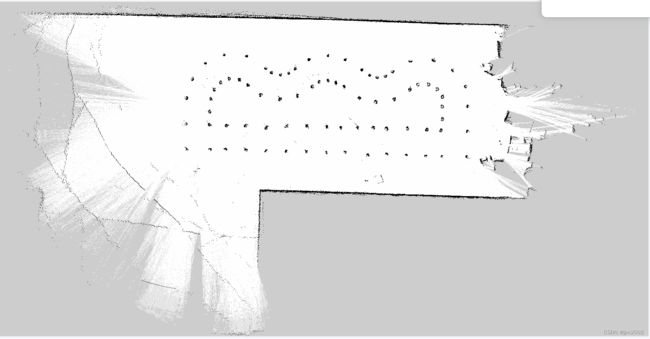
处理后: