接下来我们回顾一下动态规划算法(DP)和蒙特卡罗方法(MC)的特点,对于动态规划算法有如下特性:
- 需要环境模型,即状态转移概率
- 状态值函数的估计是自举的(bootstrapping),即当前状态值函数的更新依赖于已知的其他状态值函数。
相对的,蒙特卡罗方法的特点则有:
- 可以从经验中学习不需要环境模型
- 状态值函数的估计是相互独立的
- 只能用于episode tasks
而我们希望的算法是这样的:
- 不需要环境模型
- 它不局限于episode task,可以用于连续的任务
本文介绍的时间差分学习(Temporal-Difference learning, TD learning)正是具备了上述特性的算法,它结合了DP和MC,并兼具两种算法的优点。
TD Learing思想
在介绍TD learning之前,我们先引入如下简单的蒙特卡罗算法,我们称为constant- MC,它的状态值函数更新公式如下:
其中 是每个episode结束后获得的实际累积回报, 是学习率,这个式子的直观的理解就是 用实际累积回报作为状态值函数的估计值。具体做法是对每个episode,考察实验中 的实际累积回报 和当前估计 的偏差值,并用该偏差值乘以学习率来更新得到 的新估值。
现在我们将公式修改如下,把换成,就得到了TD(0)的状态值函数更新公式:
为什么修改成这种形式呢,我们回忆一下状态值函数的定义:
容易发现这其实是根据(3)的形式,利用真实的立即回报 和下个状态的值函数 来更新 ,这种就方式就称为时间差分(temporal difference)。由于我们没有状态转移概率,所以要利用多次实验来得到期望状态值函数估值。类似MC方法,在足够多的实验后,状态值函数的估计是能够收敛于真实值的。
那么MC和TD(0)的更新公式的有何不同呢?我们举个例子,假设有以下8个episode, 其中A-0表示经过状态A后获得了回报0:
| index | samples |
|---|---|
| episode 1 | A-0, B-0 |
| episode 2 | B-1 |
| episode 3 | B-1 |
| episode 4 | B-1 |
| episode 5 | B-1 |
| episode 6 | B-1 |
| episode 7 | B-1 |
| episode 8 | B-0 |
首先我们使用constant- MC方法估计状态A的值函数,其结果是,这是因为状态A只在episode 1出现了一次,且其累计回报为0。
现在我们使用TD(0)的更新公式,简单起见取,我们可以得到。这个结果是如何计算的呢? 首先,状态B的值函数是容易求得的,B作为终止状态,获得回报1的概率是75%,因此。接着从数据中我们可以得到状态A转移到状态B的概率是100%并且获得的回报为0。根据公式(2)可以得到,可见在只有的时候,式(2)收敛。对这个例子,可以作图表示:

可见式(2)由于能够利用其它状态的估计值,其得到的结果更加合理,并且由于不需要等到任务结束就能更新估值,也就不再局限于episode task了。此外,实验表明TD(0)从收敛速度上也显著优于MC方法。
将式(2)作为状态值函数的估计公式后,前面文章中介绍的策略估计算法就变成了如下形式,这个算法称为TD prediction:
输入:待估计的策略
任意初始化所有,()
Repeat(对所有episode):
初始化状态
Repeat(对每步状态转移):
策略下状态采取的动作
采取动作,观察回报,和下一个状态
Until is terminal
Until 所有收敛
输出
Sarsa算法
现在我们利用TD prediction组成新的强化学习算法,用到决策/控制问题中。在这里,强化学习算法可以分为在策略(on-policy)和离策略(off-policy)两类。首先要介绍的sarsa算法属于on-policy算法。
与前面DP方法稍微有些区别的是,sarsa算法估计的是动作值函数(Q函数)而非状态值函数。也就是说,我们估计的是策略下,任意状态上所有可执行的动作a的动作值函数,Q函数同样可以利用TD Prediction算法估计。如下就是一个状态-动作对序列的片段及相应的回报值。

给出sarsa的动作值函数更新公式如下:
可见式(4)与式(2)的形式基本一致。需要注意的是,对于每个非终止的状态,在到达下个状态后,都可以利用上述公式更新,而如果是终止状态,则要令。由于动作值函数的每次更新都与相关,因此算法被命名为sarsa算法。sarsa算法的完整流程图如下:

算法最终得到所有状态-动作对的Q函数,并根据Q函数输出最优策略
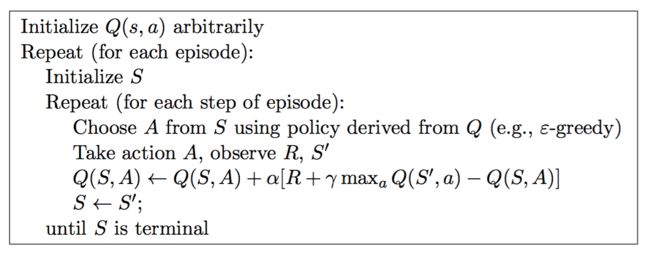
Q-learning
在sarsa算法中,选择动作时遵循的策略和更新动作值函数时遵循的策略是相同的,即的策略,而在接下来介绍的Q-learning中,动作值函数更新则不同于选取动作时遵循的策略,这种方式称为离策略(Off-Policy)。Q-learning的动作值函数更新公式如下:
可以看到,Q-learning与sarsa算法最大的不同在于 更新Q值的时候,直接使用了最大的值——相当于采用了值最大的动作,并且与当前执行的策略,即选取动作时采用的策略无关。 Off-Policy方式简化了证明算法分析和收敛性证明的难度,使得它的收敛性很早就得到了证明。Q-learning的完整流程图如下:
小结
本篇介绍了TD方法思想和TD(0),Q(0),Sarsa(0)算法。TD方法结合了蒙特卡罗方法和动态规划的优点,能够应用于无模型、持续进行的任务,并拥有优秀的性能,因而得到了很好的发展,其中Q-learning更是成为了强化学习中应用最广泛的方法。在下一篇中,我们将引入资格迹(Eligibility Traces)提高算法性能,结合Eligibility Traces后,我们可以得到等算法
参考资料
[1] R.Sutton et al. Reinforcement learning: An introduction, 1998