yolov5-计算fps(新加入:4. 记录运行B导yolov7-tiny后计算fps的方法)
目录
- 0. FPS记录的原理
- 1. 自己的
- 2. 其实yolov5有自带的打印这些参数
- 3. 清风大佬分享的
-
- 3.1 单个的计算fps函数
- 3.2 整体的完整代码
- 4. 记录运行B导yolov7-tiny后计算fps的方法
0. FPS记录的原理
参考自:睿智的目标检测21——如何调用摄像头进行目标检测
FPS简单来理解就是图像的刷新频率,也就是每秒多少帧
假设目标检测网络处理1帧要0.02s,此时FPS就是50
#---------------------------分割线-------------------------------- #
也就是说在计算FPS的时候,会强调每秒、每张。因此,在众多博客中计算FPS时,都会注意以下两点:
- 实现要求
每张:将batch-size设置为1 - 实现要求
每秒:用1000去除以3个时间之和(1s=1000ms,调用yolov5中的val.py后会计算并打印出pre-process图像预处理、inference推理、NMS非极大值抑制处理这3个ms级时间)

1. 自己的
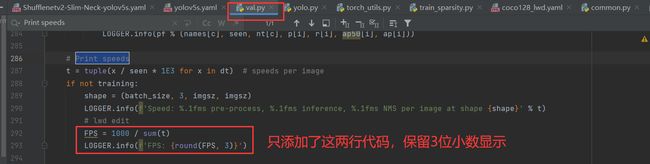
在yolov5的val.py文件中添加了如下两行代码,即可实现打印:
实现步骤:
- 在
val.py中按住快捷键Ctrl+F搜索Print speeds定位过去 - 在上图中的合适位置添加如下代码:
FPS = 1000 / sum(t)
LOGGER.info(f'FPS: {round(FPS, 3)}')
- 调整好合适参数,直接运行
val.py即可(但是要注意一下,batch-size要设置为1)
2. 其实yolov5有自带的打印这些参数
参考链接:查看yolov5/lite各层参数量和各层FLOPs
实现方法:(主要是直接调用的yolov5中已经写好的代码utils/torch_utils.py中的profile等函数)
- 在终端运行
yolo.py时,带上参数--profile,这样可以打印整体的参数量、浮点数运算等 - 在终端运行
yolo.py时,带上参数--line-profile,这样可以打印出每层的参数量、浮点数等(这第2种方法,在yolov5-master下载下来的val.py中可实现,如果单独下载的yolov5-v6.1中没有这个--line-profile参数)
3. 清风大佬分享的
3.1 单个的计算fps函数
def compute_speed(model, input_size, device, iteration=100):
torch.cuda.set_device(device)
cudnn.benchmark = True
model.eval()
model = model.cuda()
input = torch.randn(*input_size, device=device)
for _ in range(50):
model(input)
print('=========Eval Forward Time=========')
torch.cuda.synchronize()
t_start = time.time()
for _ in range(iteration):
model(input)
torch.cuda.synchronize()
elapsed_time = time.time() - t_start
speed_time = elapsed_time / iteration * 1000
fps = iteration / elapsed_time
print('Elapsed Time: [%.2f s / %d iter]' % (elapsed_time, iteration))
print('Speed Time: %.2f ms / iter FPS: %.2f' % (speed_time, fps))
return speed_time, fps
3.2 整体的完整代码
def compute_speed(model, input_size, device, iteration=100):
torch.cuda.set_device(device)
cudnn.benchmark = True
model.eval()
model = model.cuda()
input = torch.randn(*input_size, device=device)
for _ in range(50):
model(input)
print('=========Eval Forward Time=========')
torch.cuda.synchronize()
t_start = time.time()
for _ in range(iteration):
model(input)
torch.cuda.synchronize()
elapsed_time = time.time() - t_start
speed_time = elapsed_time / iteration * 1000
fps = iteration / elapsed_time
print('Elapsed Time: [%.2f s / %d iter]' % (elapsed_time, iteration))
print('Speed Time: %.2f ms / iter FPS: %.2f' % (speed_time, fps))
return speed_time, fps
if __name__ == '__main__':
parser = ArgumentParser()
parser.add_argument("--size", type=str, default="256,256", help="input size of model")
parser.add_argument('--num-channels', type=int, default=3)
parser.add_argument('--batch-size', type=int, default=8)
parser.add_argument('--classes', type=int, default=2)
parser.add_argument('--iter', type=int, default=501)
parser.add_argument('--model', type=str, default='deeplabv3plus_mobilenet')
parser.add_argument("--gpus", type=str, default="0", help="gpu ids (default: 0)")
args = parser.parse_args()
h, w = map(int, args.size.split(','))
model = build_model(args.model, num_classes=args.classes)
compute_speed(model, (args.batch_size, args.num_channels, h, w), int(args.gpus), iteration=args.iter)
4. 记录运行B导yolov7-tiny后计算fps的方法
B导的yolov7-tiny代码地址:yolov7-tiny-pytorch
兴许他的yolox的fps也可以这样来计算呢,地址为:yolox-pytorch
顺利跑起来的步骤:
- 在根目录下的
summary.py中加入上面3.清风大佬分享的代码,整体如下:
# --------------------------------------------#
# 该部分代码用于看网络结构
# --------------------------------------------#
import torch
from thop import clever_format, profile
from torch.backends import cudnn
import time
from nets.yolo import YoloBody
def compute_speed(model, input_size, device, iteration=1000): # 这个iteration的作用是预热cpu
torch.cuda.set_device(device)
cudnn.benchmark = True
model.eval()
model = model.cuda()
input = torch.randn(*input_size, device=device)
for _ in range(50):
model(input)
print('=========Eval Forward Time=========')
torch.cuda.synchronize()
t_start = time.time()
for _ in range(iteration):
model(input)
torch.cuda.synchronize()
elapsed_time = time.time() - t_start
speed_time = elapsed_time / iteration * 1000
fps = iteration / elapsed_time
print('Elapsed Time: [%.2f s / %d iter]' % (elapsed_time, iteration))
print('Speed Time: %.2f ms / iter FPS: %.2f' % (speed_time, fps))
return speed_time, fps
if __name__ == "__main__":
input_shape = [640, 640]
anchors_mask = [[6, 7, 8], [3, 4, 5], [0, 1, 2]]
num_classes = 4
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
m = YoloBody(anchors_mask, num_classes, False).to(device)
for i in m.children():
print(i)
print('==============================')
dummy_input = torch.randn(1, 3, input_shape[0], input_shape[1]).to(device)
flops, params = profile(m.to(device), (dummy_input,), verbose=False)
# --------------------------------------------------------#
# flops * 2是因为profile没有将卷积作为两个operations
# 有些论文将卷积算乘法、加法两个operations。此时乘2
# 有些论文只考虑乘法的运算次数,忽略加法。此时不乘2
# 本代码选择乘2,参考YOLOX。
# --------------------------------------------------------#
flops = flops * 2
flops, params = clever_format([flops, params], "%.3f")
print('Total GFLOPS: %s' % (flops))
print('Total params: %s' % (params))
# -------------------------计算fps------------------------ #
model = YoloBody(anchors_mask, num_classes, False)
speed_time, fps = compute_speed(m, (1, 3, 640, 640), device=0)
print(speed_time)
print(fps)
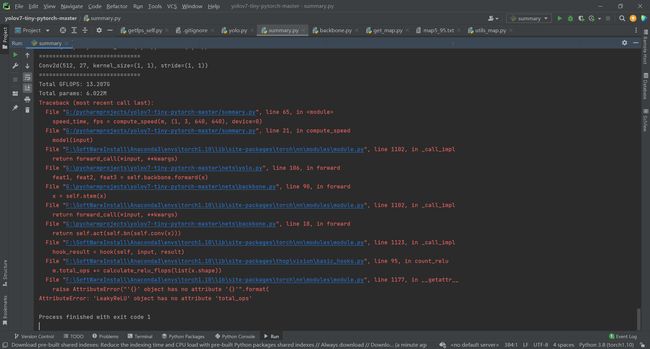
- 然后就报错咯,如下图
问题应该是出在最后那一句报错:AttributeError: 'LeakyReLU' object has no attribute 'total_ ops'
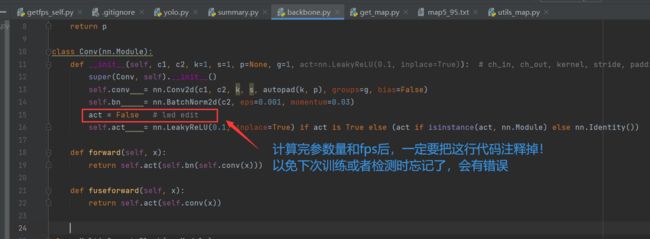
- 针对2.报的错,清风大佬让我试试【把LeaKy这个激活函数去了】。于是我的操作就是:在
nets\backbone.py文件中的15行加入一句代码act = False。如下图:
- 有个疑问,
compute_speed函数中的iteration是什么作用,为什么默认为100?
然后清风大佬就给我解释了:
iteration是用于预热cpu的iteration的值不固定,对结果的影响很小
下图对比了我训练完之后,用iteration=100和iteration=1000的fps结果:
 lwd
lwd