攻击样本生成算法之 L -BFGS(实质上是优化算法的合理实现)
转载自https://www.hankcs.com/ml/l-bfgs.html
 译自《Numerical Optimization: Understanding L-BFGS》,本来只想作为学习CRF的补充材料,读完后发现收获很多,把许多以前零散的知识点都串起来了。对我而言,的确比零散地看论文要轻松得多。原文并没有太多关注实现,对实现感兴趣的话推荐原作者的golang实现。
译自《Numerical Optimization: Understanding L-BFGS》,本来只想作为学习CRF的补充材料,读完后发现收获很多,把许多以前零散的知识点都串起来了。对我而言,的确比零散地看论文要轻松得多。原文并没有太多关注实现,对实现感兴趣的话推荐原作者的golang实现。
数值优化是许多机器学习算法的核心。一旦你确定用什么模型,并且准备好了数据集,剩下的工作就是训练了。估计模型的参数(训练模型)通常归结为最小化一个多元函数 ,其中输入
,其中输入![]() 是一个高维向量,也就是模型参数。换句话说,如果你求解出:
是一个高维向量,也就是模型参数。换句话说,如果你求解出:

那么![]() *就是最佳的模型参数(当然跟你选择了什么目标函数有关系)。
*就是最佳的模型参数(当然跟你选择了什么目标函数有关系)。
在这篇文章中,我将重点放在讲解L-BFGS算法的无约束最小化上,该算法在一些能用上批处理优化的ML问题中特别受欢迎。对于更大的数据集,则常用SGD方法,因为SGD只需要很少的迭代次数就能达到收敛。在以后的文章中,我可能会涉及这些技术,包括我个人最喜欢的AdaDelta 。
注 : 在整个文章中,我会假设你记得多元微积分。所以,如果你不记得什么是梯度或海森矩阵,你得先复习一下。
牛顿法
大多数数值优化算法都是迭代式的,它们产生一个序列,该序列最终收敛于![]() ,使得达到全局最小化。假设,我们有一个估计
,使得达到全局最小化。假设,我们有一个估计 ,我们希望我们的下一个估计
,我们希望我们的下一个估计![]() 有这种属性:
有这种属性: 。
。
牛顿的方法是在点附近使用二次函数近似![]() 。假设
。假设![]() 是二次可微的,我们可以用
是二次可微的,我们可以用![]() 在点
在点![]() 的泰勒展开来近似
的泰勒展开来近似![]() 。
。

其中, 和
和 分别为目标函数
分别为目标函数![]() 在点处的梯度和Hessian矩阵。当
在点处的梯度和Hessian矩阵。当 时,上面的近似展开式是成立的。你可能记得微积分中一维泰勒多项式展开,这是其推广。
时,上面的近似展开式是成立的。你可能记得微积分中一维泰勒多项式展开,这是其推广。
为了简化符号,将上述二次近似记为 ,我们把生成这样的二次近似的迭代算法中的一些概念简记如下:
,我们把生成这样的二次近似的迭代算法中的一些概念简记如下:
不失一般性,我们可以记 ,那么上式可以写作:
,那么上式可以写作:

其中 和
和 分别表示目标函数在点处的梯度和Hessian矩阵。
分别表示目标函数在点处的梯度和Hessian矩阵。
我们想找一个 ,使得
,使得![]() 在的二次近似最小。上式对求导:
在的二次近似最小。上式对求导:
任何使得 的
的 都是
都是 的局部极值点,如果我们假设
的局部极值点,如果我们假设![]() 是凸函数,则是正定的,那么局部极值点就是全局极值点(凸二次规划)。
是凸函数,则是正定的,那么局部极值点就是全局极值点(凸二次规划)。
解出:

这就得到了一个很好的搜索方向,在实际应用中,我们一般选择一个步长α,即按照下式更新![]() :
:

使得 相比的减小量最大化。
相比的减小量最大化。
迭代算法伪码:
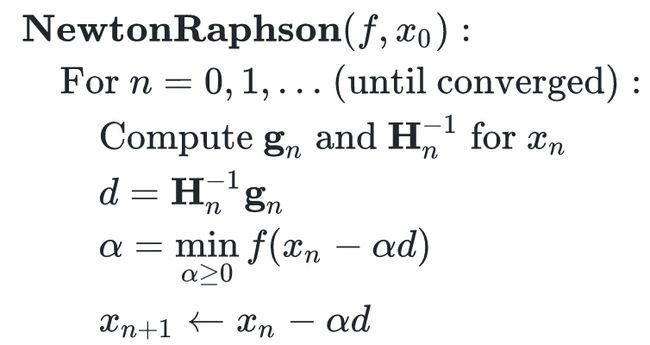
步长α的确定可以采用任何line search算法,其中最简单的一种是backtracking line search。该算法简单地选取越来越小的步长α,直到![]() 的值小到满意为止。关于line search算法的详情请参考
的值小到满意为止。关于line search算法的详情请参考![]() Line Search Methods.pdf或
Line Search Methods.pdf或![]() Lecture 5- Gradient Descent.pdf。
Lecture 5- Gradient Descent.pdf。
在软件工程上,我们可以将牛顿法视作实现了下列Java接口的一个黑盒子:
- public interface TwiceDifferentiableFunction
- {
- // compute f(x)
- double valueAt(double[] x);
- // compute grad f(x)
- double[] gradientAt(double[] x);
- // compute inverse hessian H^-1
- double[][] inverseHessian(double[] x);
- }
如果你有兴趣,你还可以通过一些枯燥无味的数学公式,证明对任意一个凸函数,上述算法一定可以收敛到一个唯一的最小值 ,且不受初值
,且不受初值![]() 的影响。对于非凸函数,上述算法仍然有效,但只能保证收敛到一个局部极小值。在上述算法于非凸函数的实际应用中,用户需要注意初值的选取以及其他算法细节。
的影响。对于非凸函数,上述算法仍然有效,但只能保证收敛到一个局部极小值。在上述算法于非凸函数的实际应用中,用户需要注意初值的选取以及其他算法细节。
巨大的海森矩阵
牛顿法最大的问题在于我们必须计算海森矩阵的逆。注意在机器学习应用中,![]() 的输入的维度常常与模型参数对应。十万维度的参数并不少见(SVM中文文本分类取词做特征的话,就在十万这个量级),在一些图像识别的场景中,参数可能上十亿。所以,计算海森矩阵或其逆并不现实。对许多函数而言,海森矩阵可能根本无法计算,更不用说表示出来求逆了。
的输入的维度常常与模型参数对应。十万维度的参数并不少见(SVM中文文本分类取词做特征的话,就在十万这个量级),在一些图像识别的场景中,参数可能上十亿。所以,计算海森矩阵或其逆并不现实。对许多函数而言,海森矩阵可能根本无法计算,更不用说表示出来求逆了。
所以,在实际应用中牛顿法很少用于大型的优化问题。但幸运的是,即便我们不求出![]() 在的精确
在的精确 ,而使用一个近似的替代值,上述算法依然有效。
,而使用一个近似的替代值,上述算法依然有效。
拟牛顿法
如果不求解![]() 在的精确,我们要使用什么样的近似呢?我们使用一种叫QuasiUpdate的策略来生成的近似,先不管QuasiUpdate具体是怎么做的,有了这个策略,牛顿法进化为如下的拟牛顿法:
在的精确,我们要使用什么样的近似呢?我们使用一种叫QuasiUpdate的策略来生成的近似,先不管QuasiUpdate具体是怎么做的,有了这个策略,牛顿法进化为如下的拟牛顿法:
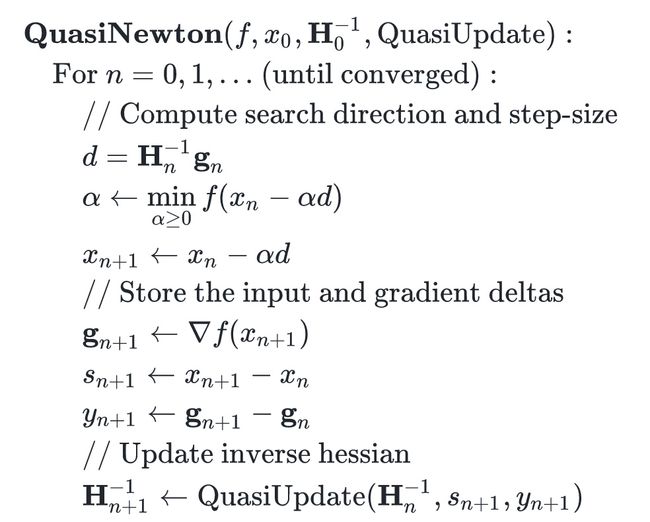
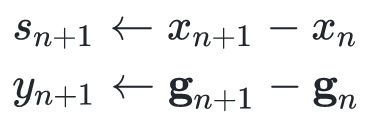
跟牛顿法相比,只是把的计算交给了QuasiUpdate。为了辅助QuasiUpdate,计算了几个中间变量。QuasiUpdate只需要上个迭代的、输入和梯度的变化量(![]() 和
和![]() )。如果QuasiUpdate能够返回精确的
)。如果QuasiUpdate能够返回精确的 的逆,则拟牛顿法等价于牛顿法。
的逆,则拟牛顿法等价于牛顿法。
在软件工程上,我们又可以写一个黑盒子接口,该接口不再需要计算海森矩阵的逆,只需要在内部更新它,再提供一个矩阵乘法的接口即可。事实上,内部如何处理,外部根本无需关心。用Java表示如下:
- public interface DifferentiableFunction
- {
- // compute f(x)
- double valueAt(double[] x);
- // compute grad f(x)
- double[] gradientAt(double[] x);
- }
- public interface QuasiNewtonApproximation
- {
- // update the H^{-1} estimate (using x_{n+1}-x_n and grad_{n+1}-grad_n)
- void update(double[] deltaX, double[] deltaGrad);
- // H^{-1} (direction) using the current H^{-1} estimate
- double[] inverseHessianMultiply(double[] direction);
- }
注意我们唯一用到海森矩阵的逆的地方就是求它与梯度的乘积,所以我们根本不需要在内存中将其显式地、完全地表示出来。这对接下来要阐述的L-BFGS特别有用。如果你对实现细节感兴趣,可以看看作者的golang实现。
近似海森矩阵
QuasiUpdate到底要如何近似海森矩阵呢?如果我们让QuasiUpdate忽略输入参数,直接返回单位矩阵,那么拟牛顿法就退化成了梯度下降法了,因为函数减小的方向永远是梯度。梯度下降法依然能保证凸函数![]() 收敛到全局最优对应的
收敛到全局最优对应的![]() ,但直觉告诉我们,梯度下降法没有利用到
,但直觉告诉我们,梯度下降法没有利用到![]() 的二阶导数信息,收敛速度肯定更慢了。
的二阶导数信息,收敛速度肯定更慢了。
我们先把![]() 的二次近似写在下面,从这里找些灵感。
的二次近似写在下面,从这里找些灵感。
Secant Condition
 的一个性质是,它的梯度与
的一个性质是,它的梯度与![]() 在处的梯度一致(近似函数的梯度与原函数的梯度一致,这才叫近似嘛)。也就是说我们希望保证:
在处的梯度一致(近似函数的梯度与原函数的梯度一致,这才叫近似嘛)。也就是说我们希望保证:
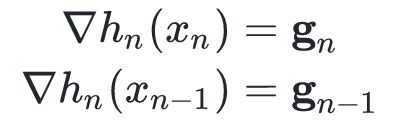
我们做个减法:

由中值定理,我们有:

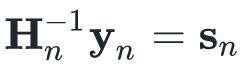
这个式子就是所谓的Secant Condition,该条件保证 至少对
至少对![]() 而言是近似海森矩阵的。
而言是近似海森矩阵的。
等式两边同时乘以,并且由于我们定义过:
于是我们得到:
对称性
由定义知海森矩阵是函数的二阶偏导数矩阵,即 ,所以海森矩阵一定是对称的。
,所以海森矩阵一定是对称的。
BFGS更新
形式化地讲,我们希望至少满足上述两个条件:
-
对
 和
和 而言满足Secant Condition
而言满足Secant Condition -
满足对称性
给定上述两个条件,我们还希望相较于 的变化量最小。这类似“ MIRA 更新”,我们有许多满足条件的选项,但我们只选那个变化最小的。这种约束形式化地表述如下:
的变化量最小。这类似“ MIRA 更新”,我们有许多满足条件的选项,但我们只选那个变化最小的。这种约束形式化地表述如下:
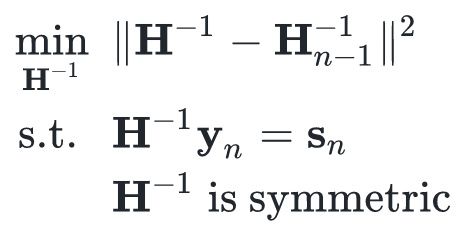
上面的范数 表示weighted frobenius norm。这个约束最小化问题的解是:
表示weighted frobenius norm。这个约束最小化问题的解是:
![]()
式中 。我不知道如何推导它,推导的话需要用很多符号,并且费时费力。
。我不知道如何推导它,推导的话需要用很多符号,并且费时费力。
这种更新算法就是著名的Broyden–Fletcher–Goldfarb–Shanno (BFGS)算法,该算法是取发明者名字的首字母命名的。
关于BFGS,有一些需要注意的点:
-
只要
是正定的, 就一定是正定的。所以我们只需要选择一个正定的
就一定是正定的。所以我们只需要选择一个正定的 即可,甚至可以选择单位矩阵。
即可,甚至可以选择单位矩阵。 - 和还存在简单的算术关系,给定和和,我们就能倒推出。
把这些知识放到一起,我们就得出了BFGS更新的算法,给定方向d,该算法可以计算出 ,却不需要求矩阵,只需要按照上述表达式不断地递推即可:
,却不需要求矩阵,只需要按照上述表达式不断地递推即可:
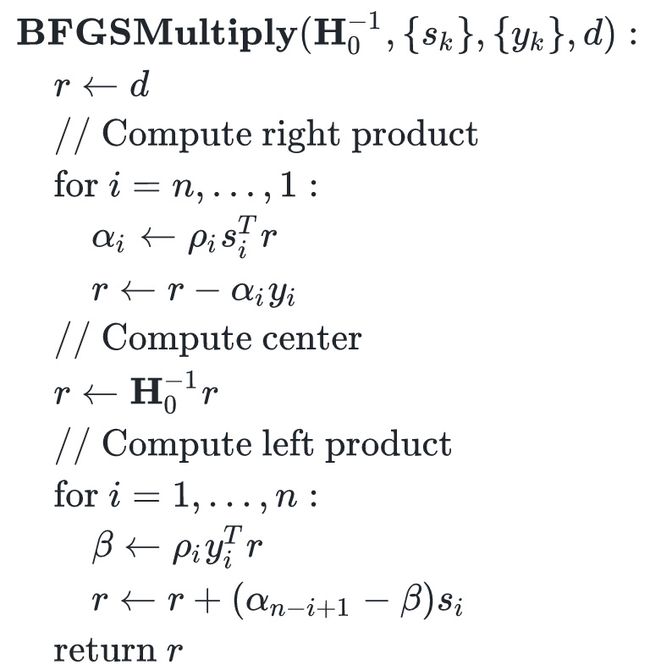
由于的唯一作用就是计算 ,我们只需用该更新算法就能实现拟牛顿法。
,我们只需用该更新算法就能实现拟牛顿法。
L-BFGS:省内存的BFGS
BFGS拟牛顿近似算法虽然免去了计算海森矩阵的烦恼,但是我们仍然需要保存每次迭代的![]() 和
和![]() 的历史值。这依然没有减轻内存负担,要知道我们选用拟牛顿法的初衷就是减小内存占用。
的历史值。这依然没有减轻内存负担,要知道我们选用拟牛顿法的初衷就是减小内存占用。
L-BFGS是limited BFGS的缩写,简单地只使用最近的m个![]() 和
和![]() 记录值。也就是只储存
记录值。也就是只储存![]() 和
和![]() ,用它们去近似计算。初值
,用它们去近似计算。初值 依然可以选取任意对称的正定矩阵。
依然可以选取任意对称的正定矩阵。
L-BFGS改进算法
在实际应用中有许多L-BFGS的改进算法。对不可微分的函数,可以用 othant-wise 的L-BFGS改进算法来训练 正则损失函数。
正则损失函数。
不在大型数据集上使用L-BFGS的原因之一是,在线算法可能收敛得更快。这里甚至有一个L-BFGS的在线学习算法,但据我所知,在大型数据集上它们都不如一些SGD的改进算法(包括 AdaGrad 或 AdaDelta)的表现好。
Reference
http://aria42.com/blog/2014/12/understanding-lbfgs