- ros学习之路径规划
许卿768503
学习
一、全局路径规划中的地图1、栅格地图(GridMap)2、概率图(CostMap)3、特征地图(FeatureMap4、拓扑地图(TopologicalMap)二、全局路径规划算法1、Dijkstra算法2、最佳路径优先搜索算法(BFS)3、A*搜索算法双向A*搜索算法重复A*搜索算法AnytimeRepairingA*(ARA*)搜索算法实时学习A*搜索(LRTA*)算法实时适应性A*搜索(RT
- ROS学习笔记5:常用API和模块导入
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满15篇(5/15)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:初始化,话题服务
- ROS入门、ROS完整教程
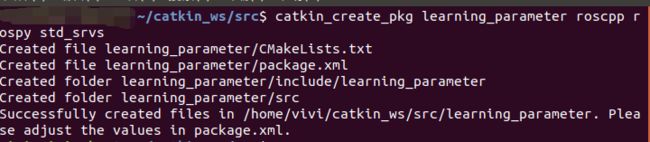
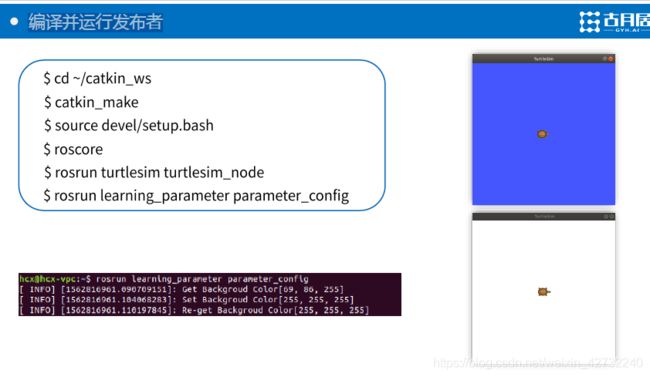
ROS学习入门说明:学习视频:古月居ROS入门21讲代码:https://github.com/huchunxu/ros_21_tutorials文章目录ROS学习入门1.ROS常用命令2.工作空间1.创建工作空间2.创建功能包3.配置环境变量3.示例1.发布者示例2.发布者示例4.自定义话题消息与使用1.编写msg文件2.编写测试文件3.编译运行5.示例1.客户端示例2.服务端示例6.自定义服务
- ros学习:6.通信机制概述
Lruriy.
学习
ROS的通信机制主要包括话题通信、服务通信、动作通信以及参数服务器,以下是具体介绍:话题通信(Publish/Subscribe)原理:基于发布/订阅模式,节点可以通过发布者(Publisher)将消息发送到话题,其他节点则可以通过订阅者(Subscriber)接收这些消息。发布者和订阅者之间是异步通信,发布者发布消息后无需等待反馈,继续执行下一个动作;订阅者通过回调函数来处理接收到的消息。流程:
- ROS学习之动作通信
扶我起来我还想学
学习机器人pythonc++
在b站学习赵老师的ROS通信,下面给出相关学习笔记2.4.5_动作通信_小结_哔哩哔哩_bilibili首先,服务端的目标:可以提取客户端请求提交的整形数据,并且累加从1到该数据之间所有整数之和完成每累加一次都计算当前运算进度,连续返回到客户端,在最后显示求和关于C++实现代码:#include"rclcpp/rclcpp.hpp"#include"rclcpp_action/rclcpp_act
- ROS学习话题通信之Python实现
扶我起来我还想学
学习pythonROS2ubuntu
与上一篇C++实现同理下面给出相关的Python实现代码关于py文件的talker:(demo01_talker_str_pyimportrclpyfromrclpy.nodeimportNodefromstd_msgs.msgimportStringclassTalker(Node):def__init__(self):super().__init__("talker_node_py")self
- ROS学习之消息通信
闲逸居士
ros
在ROS中,消息通信有话题,服务,动作,参数。话题(topic)发布者(Publicer)发布话题,订阅者(Subscriber)订阅话题。实质:发布者向主节点注册自己的话题等多种信息,并向该话题推送消息,不在乎谁订阅了。而订阅者订阅自己希望看到的话题的消息,也不在乎是谁推送的消息。所以许多时候,终端可以当作自定义节点使用,插足在其中。a.所以就有很多的特性,你自然而然就通了,异步很正常b.多个发
- 【rviz】ROS学习笔记
zhuyan108
学习笔记机器人
1、.rviz配置文件的导出(1)创建urdf文件(2)创建launch启动文件,在文件中指定urdf、rviz配置文件(3)使用launch文件启动rviz,调整rviz界面的配置,在file,saveas中将当前页面配置保存为.rviz文件。(4)替换launch中的.rviz文件,之后再启动rviz就是按照.rviz中的配置来默认加载。2、rviz加载模型的原理RViz在ROS(RobotO
- ROS学习——通过键盘控制机器人运动
嵵266
学习计算机外设机器人
ROS学习通过键盘实现机器人的运动C++代码在软件包中创建节点代码及其解析如下#include#include#include#includeusingnamespacestd;//设定键位映射(线速度,角速度)map>key_mapping={{'w',{1.0,0.0}},//前进{'s',{-1.0,0.0}},//后退{'a',{0.0,1.0}},//左转{'d',{0.0,-1.0}}
- ROS学习——(三)ROS的通信机制(上)
chillin''
学习c++pythonlinuxubuntu
下面介绍ros中最重要的组成部分——通信。ros的通信将各个孤立的节点联系在一起,进行相应的数据传输和交流,可以说是ros运行的核心。文章目录概述话题通信实现过程角色流程注意应用发布者创建示例:订阅方实现示例ros的消息类型1.标准消息(std_msgs)2.几何消息(geometry_msgs)3.传感器消息(sensor_msgs)4.导航消息(nav_msgs)5.行为消息(actionli
- ROS学习——(一)ROS总体架构
chillin''
学习ubuntu架构
对于第一次接触ros的初学者来说,首先一个问题应该是ros究竟是什么,所谓的机器人操作系统究竟由什么,接下来将由整个系统的结构开始我们的学习。(我的笔记更倾向于大致梗概的分点记录,对于详细连续的知识可能看技术手册会更好)ROS架构分层视图核心组件ROS文件系统1.工作空间(catkinworkspace)顶层2.ROS包(package)`CMake`的基本概念和作用:`catkin`的作用:`c
- 【SolidWorks转URDF】ROS学习笔记
zhuyan108
学习笔记机器人
一、环境配置软件版本:SolidWorks2022SP3.1Premium转换插件版本:sw2urdfSetup2021.exe对硬件有一定要求,需要独立显卡,显存大一点,否则会很卡。二、文件转换SolidWorks中的零部件和装配体对应URDF文件中的link,零部件和装配体之间的连接对应URDF文件中的joint。因此,需要事先将SolidWorks模型划分为正确的零部件和装配体的树形结构,并
- ROS学习笔记之深度相机仿真、小结
要好好养胃
ROS学习笔记人工智能机器学习c++
通过Gazebo模拟kinect摄像头,并在Rviz中显示kinect摄像头数据。实现流程:kinect摄像头仿真基本流程:已经创建完毕的机器人模型,编写一个单独的xacro文件,为机器人模型添加kinect摄像头配置;将此文件集成进xacro文件;启动Gazebo,使用Rviz显示kinect摄像头信息。1.Gazebo仿真Kinect1.1新建Xacro文件,配置kinetic传感器信息//这
- ROS学习笔记之摄像头仿真及显示
要好好养胃
ROS学习笔记人工智能机器学习c++
通过Gazebo模拟摄像头传感器,并在Rviz中显示摄像头数据。实现流程:摄像头仿真基本流程:已经创建完毕的机器人模型,编写一个单独的xacro文件,为机器人模型添加摄像头配置;将此文件集成进xacro文件;启动Gazebo,使用Rviz显示摄像头信息。1.Gazebo仿真摄像头1.1新建Xacro文件,配置摄像头传感器信息有几个要自行修改的地方,基本设置和laser有相同的部分,不做赘述。//实
- ROS学习笔记
xiyuping24
学习笔记机器人图论
下载使用鱼香ROS,一键下载十分好评~学习地址官网网站:ros.wiki调试打开终端,输入roscore,发现最后输出startcoreservice,说明安装成功尝试小海龟,打开另一个终端,输入rosrunturtlesimturtlesim_node,出现小海龟的窗口,说明成功其他小海龟玩法:小海龟画圆关于文件结构最高层是home中自己建的workspace,在里面应该有三大部分:buildd
- ROS学习笔记-roslaunch文件的编写&用sh脚本控制launch文件启动顺序
诗筱涵
ROS无人机-a-个人笔记
转载自:https://mp.weixin.qq.com/s?__biz=MzUyMTkxODQyOQ==&mid=2247484719&idx=1&sn=27b3a01c295ae256dc69d805fd5904ba&chksm=f9d2879dcea50e8b71b78d8b69750d282055173ea65494342e983088276859b7c4fe227f21f1&scene=
- ROS学习(5)可视化和调试工具一
敲代码的雪糕
ROSROS
文章目录前言一、调试ROS节点1、使用gdb调试器调试节点2、在节点启动时调用gdb调试器3、在节点启动时调用valgrind分析节点4、设置ROS节点core文件存储二、日志消息1.输出日志消息2.调试消息级别3.为特定节点配置调试消息级别4.消息命名5.按条件显示消息与过滤消息6.显示消息的方式7.使用rqt_console和rqt_logger_level在运行时修改调试级别总结前言ROS自
- 我的ROS学习笔记(四)
zenpluck
自动驾驶c++
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档publisher程序代码学习前言一、包含消息类型声明二、创建发布者对象三、创建并填充消息对象四、发布消息五、消息发布循环1.节点是否停止工作的检查2.控制消息发布频率总结前言发布者程序包含了很多之前不懂的知识,刚开始也许只能复制粘贴代码来运行实例,但最终目的还是为了自己能够编写这些代码。因此,弄明白哪部分代码是什么意思非常有必要,不
- 黄金票据 --- kerberos学习记录
B1ackMa9ic
学习网络网络攻击模型安全
文章目录Kerberos协议是怎么工作的一、黄金票据利用条件利用步骤Kerberos协议是怎么工作的这里首先要搞懂几个概念:认证服务器(AuthenticationServer,AS):负责首次身份验证和颁发TGT(TicketGrantingTicket)给用户。用户通过AS向Kerberos服务器发送身份验证请求,并在验证通过后获取TGT。授权票证颁发服务器(TicketGrantingSer
- 移动机器人激光SLAM导航(五):Cartographer SLAM 篇
Robot_Yue
自主探索导航学习SLAMCartographer工程化调参
参考Cartographer官方文档Cartographer从入门到精通1.Cartographer安装1.1前置条件推荐在刚装好的Ubuntu16.04或Ubuntu18.04上进行编译ROS安装:ROS学习1:ROS概述与环境搭建1.2依赖库安装资源下载完解压并执行以下指令https://pan.baidu.com/s/1LWqZ4SOKn2sZecQUDDXXEw?pwd=j6cf$sudo
- ROS学习笔记14:Action通信
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(14/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:action通
- ROS学习笔记15:动态参数
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(15/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:cfg文件,r
- ROS学习笔记13:导航相关消息
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(13/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:导航相关消息1
- ROS学习笔记12:机器人导航实现(理论)
代码能跑就可以
学习笔记机器人vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(12/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:SLAM,地图
- ROS学习笔记10:rosbag与rqt
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(10/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:rosbag,
- ROS学习笔记8:TF坐标变换
代码能跑就可以
学习笔记vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(8/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:静态变换,动态变
- ROS学习笔记9:TF坐标变换实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(9/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:乌龟跟随要求产生
- ROS学习笔记4:通信机制实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(4/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:运动控制,位姿订
- ROS学习笔记6:launch文件
代码能跑就可以
学习笔记pythonc++服务器vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(6/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:launch文件
- ROS学习笔记2:话题通信
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(2/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:理论模型,发布,
- iOS http封装
374016526
ios服务器交互http网络请求
程序开发避免不了与服务器的交互,这里打包了一个自己写的http交互库。希望可以帮到大家。
内置一个basehttp,当我们创建自己的service可以继承实现。
KuroAppBaseHttp *baseHttp = [[KuroAppBaseHttp alloc] init];
[baseHttp setDelegate:self];
[baseHttp
- lolcat :一个在 Linux 终端中输出彩虹特效的命令行工具
brotherlamp
linuxlinux教程linux视频linux自学linux资料
那些相信 Linux 命令行是单调无聊且没有任何乐趣的人们,你们错了,这里有一些有关 Linux 的文章,它们展示着 Linux 是如何的有趣和“淘气” 。
在本文中,我将讨论一个名为“lolcat”的小工具 – 它可以在终端中生成彩虹般的颜色。
何为 lolcat ?
Lolcat 是一个针对 Linux,BSD 和 OSX 平台的工具,它类似于 cat 命令,并为 cat
- MongoDB索引管理(1)——[九]
eksliang
mongodbMongoDB管理索引
转载请出自出处:http://eksliang.iteye.com/blog/2178427 一、概述
数据库的索引与书籍的索引类似,有了索引就不需要翻转整本书。数据库的索引跟这个原理一样,首先在索引中找,在索引中找到条目以后,就可以直接跳转到目标文档的位置,从而使查询速度提高几个数据量级。
不使用索引的查询称
- Informatica参数及变量
18289753290
Informatica参数变量
下面是本人通俗的理解,如有不对之处,希望指正 info参数的设置:在info中用到的参数都在server的专门的配置文件中(最好以parma)结尾 下面的GLOBAl就是全局的,$开头的是系统级变量,$$开头的变量是自定义变量。如果是在session中或者mapping中用到的变量就是局部变量,那就把global换成对应的session或者mapping名字。
[GLOBAL] $Par
- python 解析unicode字符串为utf8编码字符串
酷的飞上天空
unicode
php返回的json字符串如果包含中文,则会被转换成\uxx格式的unicode编码字符串返回。
在浏览器中能正常识别这种编码,但是后台程序却不能识别,直接输出显示的是\uxx的字符,并未进行转码。
转换方式如下
>>> import json
>>> q = '{"text":"\u4
- Hibernate的总结
永夜-极光
Hibernate
1.hibernate的作用,简化对数据库的编码,使开发人员不必再与复杂的sql语句打交道
做项目大部分都需要用JAVA来链接数据库,比如你要做一个会员注册的 页面,那么 获取到用户填写的 基本信后,你要把这些基本信息存入数据库对应的表中,不用hibernate还有mybatis之类的框架,都不用的话就得用JDBC,也就是JAVA自己的,用这个东西你要写很多的代码,比如保存注册信
- SyntaxError: Non-UTF-8 code starting with '\xc4'
随便小屋
python
刚开始看一下Python语言,传说听强大的,但我感觉还是没Java强吧!
写Hello World的时候就遇到一个问题,在Eclipse中写的,代码如下
'''
Created on 2014年10月27日
@author: Logic
'''
print("Hello World!");
运行结果
SyntaxError: Non-UTF-8
- 学会敬酒礼仪 不做酒席菜鸟
aijuans
菜鸟
俗话说,酒是越喝越厚,但在酒桌上也有很多学问讲究,以下总结了一些酒桌上的你不得不注意的小细节。
细节一:领导相互喝完才轮到自己敬酒。敬酒一定要站起来,双手举杯。
细节二:可以多人敬一人,决不可一人敬多人,除非你是领导。
细节三:自己敬别人,如果不碰杯,自己喝多少可视乎情况而定,比如对方酒量,对方喝酒态度,切不可比对方喝得少,要知道是自己敬人。
细节四:自己敬别人,如果碰杯,一
- 《创新者的基因》读书笔记
aoyouzi
读书笔记《创新者的基因》
创新者的基因
创新者的“基因”,即最具创意的企业家具备的五种“发现技能”:联想,观察,实验,发问,建立人脉。
第一部分破坏性创新,从你开始
第一章破坏性创新者的基因
如何获得启示:
发现以下的因素起到了催化剂的作用:(1) -个挑战现状的问题;(2)对某项技术、某个公司或顾客的观察;(3) -次尝试新鲜事物的经验或实验;(4)与某人进行了一次交谈,为他点醒
- 表单验证技术
百合不是茶
JavaScriptDOM对象String对象事件
js最主要的功能就是验证表单,下面是我对表单验证的一些理解,贴出来与大家交流交流 ,数显我们要知道表单验证需要的技术点, String对象,事件,函数
一:String对象;通常是对字符串的操作;
1,String的属性;
字符串.length;表示该字符串的长度;
var str= "java"
- web.xml配置详解之context-param
bijian1013
javaservletweb.xmlcontext-param
一.格式定义:
<context-param>
<param-name>contextConfigLocation</param-name>
<param-value>contextConfigLocationValue></param-value>
</context-param>
作用:该元
- Web系统常见编码漏洞(开发工程师知晓)
Bill_chen
sqlPHPWebfckeditor脚本
1.头号大敌:SQL Injection
原因:程序中对用户输入检查不严格,用户可以提交一段数据库查询代码,根据程序返回的结果,
获得某些他想得知的数据,这就是所谓的SQL Injection,即SQL注入。
本质:
对于输入检查不充分,导致SQL语句将用户提交的非法数据当作语句的一部分来执行。
示例:
String query = "SELECT id FROM users
- 【MongoDB学习笔记六】MongoDB修改器
bit1129
mongodb
本文首先介绍下MongoDB的基本的增删改查操作,然后,详细介绍MongoDB提供的修改器,以完成各种各样的文档更新操作 MongoDB的主要操作
show dbs 显示当前用户能看到哪些数据库
use foobar 将数据库切换到foobar
show collections 显示当前数据库有哪些集合
db.people.update,update不带参数,可
- 提高职业素养,做好人生规划
白糖_
人生
培训讲师是成都著名的企业培训讲师,他在讲课中提出的一些观点很新颖,在此我收录了一些分享一下。注:讲师的观点不代表本人的观点,这些东西大家自己揣摩。
1、什么是职业规划:职业规划并不完全代表你到什么阶段要当什么官要拿多少钱,这些都只是梦想。职业规划是清楚的认识自己现在缺什么,这个阶段该学习什么,下个阶段缺什么,又应该怎么去规划学习,这样才算是规划。
- 国外的网站你都到哪边看?
bozch
技术网站国外
学习软件开发技术,如果没有什么英文基础,最好还是看国内的一些技术网站,例如:开源OSchina,csdn,iteye,51cto等等。
个人感觉如果英语基础能力不错的话,可以浏览国外的网站来进行软件技术基础的学习,例如java开发中常用的到的网站有apache.org 里面有apache的很多Projects,springframework.org是spring相关的项目网站,还有几个感觉不错的
- 编程之美-光影切割问题
bylijinnan
编程之美
package a;
public class DisorderCount {
/**《编程之美》“光影切割问题”
* 主要是两个问题:
* 1.数学公式(设定没有三条以上的直线交于同一点):
* 两条直线最多一个交点,将平面分成了4个区域;
* 三条直线最多三个交点,将平面分成了7个区域;
* 可以推出:N条直线 M个交点,区域数为N+M+1。
- 关于Web跨站执行脚本概念
chenbowen00
Web安全跨站执行脚本
跨站脚本攻击(XSS)是web应用程序中最危险和最常见的安全漏洞之一。安全研究人员发现这个漏洞在最受欢迎的网站,包括谷歌、Facebook、亚马逊、PayPal,和许多其他网站。如果你看看bug赏金计划,大多数报告的问题属于 XSS。为了防止跨站脚本攻击,浏览器也有自己的过滤器,但安全研究人员总是想方设法绕过这些过滤器。这个漏洞是通常用于执行cookie窃取、恶意软件传播,会话劫持,恶意重定向。在
- [开源项目与投资]投资开源项目之前需要统计该项目已有的用户数
comsci
开源项目
现在国内和国外,特别是美国那边,突然出现很多开源项目,但是这些项目的用户有多少,有多少忠诚的粉丝,对于投资者来讲,完全是一个未知数,那么要投资开源项目,我们投资者必须准确无误的知道该项目的全部情况,包括项目发起人的情况,项目的维持时间..项目的技术水平,项目的参与者的势力,项目投入产出的效益.....
- oracle alert log file(告警日志文件)
daizj
oracle告警日志文件alert log file
The alert log is a chronological log of messages and errors, and includes the following items:
All internal errors (ORA-00600), block corruption errors (ORA-01578), and deadlock errors (ORA-00060)
- 关于 CAS SSO 文章声明
denger
SSO
由于几年前写了几篇 CAS 系列的文章,之后陆续有人参照文章去实现,可都遇到了各种问题,同时经常或多或少的收到不少人的求助。现在这时特此说明几点:
1. 那些文章发表于好几年前了,CAS 已经更新几个很多版本了,由于近年已经没有做该领域方面的事情,所有文章也没有持续更新。
2. 文章只是提供思路,尽管 CAS 版本已经发生变化,但原理和流程仍然一致。最重要的是明白原理,然后
- 初二上学期难记单词
dcj3sjt126com
englishword
lesson 课
traffic 交通
matter 要紧;事物
happy 快乐的,幸福的
second 第二的
idea 主意;想法;意见
mean 意味着
important 重要的,重大的
never 从来,决不
afraid 害怕 的
fifth 第五的
hometown 故乡,家乡
discuss 讨论;议论
east 东方的
agree 同意;赞成
bo
- uicollectionview 纯代码布局, 添加头部视图
dcj3sjt126com
Collection
#import <UIKit/UIKit.h>
@interface myHeadView : UICollectionReusableView
{
UILabel *TitleLable;
}
-(void)setTextTitle;
@end
#import "myHeadView.h"
@implementation m
- N 位随机数字串的 JAVA 生成实现
FX夜归人
javaMath随机数Random
/**
* 功能描述 随机数工具类<br />
* @author FengXueYeGuiRen
* 创建时间 2014-7-25<br />
*/
public class RandomUtil {
// 随机数生成器
private static java.util.Random random = new java.util.R
- Ehcache(09)——缓存Web页面
234390216
ehcache页面缓存
页面缓存
目录
1 SimplePageCachingFilter
1.1 calculateKey
1.2 可配置的初始化参数
1.2.1 cach
- spring中少用的注解@primary解析
jackyrong
primary
这次看下spring中少见的注解@primary注解,例子
@Component
public class MetalSinger implements Singer{
@Override
public String sing(String lyrics) {
return "I am singing with DIO voice
- Java几款性能分析工具的对比
lbwahoo
java
Java几款性能分析工具的对比
摘自:http://my.oschina.net/liux/blog/51800
在给客户的应用程序维护的过程中,我注意到在高负载下的一些性能问题。理论上,增加对应用程序的负载会使性能等比率的下降。然而,我认为性能下降的比率远远高于负载的增加。我也发现,性能可以通过改变应用程序的逻辑来提升,甚至达到极限。为了更详细的了解这一点,我们需要做一些性能
- JVM参数配置大全
nickys
jvm应用服务器
JVM参数配置大全
/usr/local/jdk/bin/java -Dresin.home=/usr/local/resin -server -Xms1800M -Xmx1800M -Xmn300M -Xss512K -XX:PermSize=300M -XX:MaxPermSize=300M -XX:SurvivorRatio=8 -XX:MaxTenuringThreshold=5 -
- 搭建 CentOS 6 服务器(14) - squid、Varnish
rensanning
varnish
(一)squid
安装
# yum install httpd-tools -y
# htpasswd -c -b /etc/squid/passwords squiduser 123456
# yum install squid -y
设置
# cp /etc/squid/squid.conf /etc/squid/squid.conf.bak
# vi /etc/
- Spring缓存注解@Cache使用
tom_seed
spring
参考资料
http://www.ibm.com/developerworks/cn/opensource/os-cn-spring-cache/
http://swiftlet.net/archives/774
缓存注解有以下三个:
@Cacheable @CacheEvict @CachePut
- dom4j解析XML时出现"java.lang.noclassdeffounderror: org/jaxen/jaxenexception"错误
xp9802
java.lang.NoClassDefFoundError: org/jaxen/JaxenExc
关键字: java.lang.noclassdeffounderror: org/jaxen/jaxenexception
使用dom4j解析XML时,要快速获取某个节点的数据,使用XPath是个不错的方法,dom4j的快速手册里也建议使用这种方式
执行时却抛出以下异常:
Exceptio