CaDDN代码调试
文章目录
- CaDDN代码调试-我的电脑
-
- 1、环境配置:
- 2、数据集准备
- 3、训练一个模型
- CaDDN代码调试-云环境
-
- 1、数据集打包上传
- 2、环境配置
- 3、错误信息
- 成功运行
- Tensorboard日志信息
- 可视化demo
- CaDDN代码调试之 docker环境的安装
CaDDN代码调试-我的电脑
CaDDN这一篇我给翻译了,链接地址
先说一下我电脑的配置:
-
HP暗影精灵5
-
双系统:win10+ubuntu1804(后边代码调试过程在ubuntu系统中进行的)
-
内存:8+16G
-
硬盘:512G SSD + 1TB 机械
-
显卡:RTX 2060 (6G)
1、环境配置:
-
配置cuda10.2的环境
之前安装过cuda10.1的,调试的过程一堆问题,然后就重装了10.2,结果还是一堆问题。安装过程的话,就推荐这篇博客吧。
-
使用conda创建一个caddn虚拟环境
我是推荐使用Anaconda来创建caddn虚拟环境的,因为需要python3.8的环境,直接使用系统环境后期可能会出很多问题。
conda create -n caddn python=3.8 -
下载CaDDN代码
git clone https://mirror.ghproxy.com/https://github.com/TRAILab/CaDDN.git -
安装编译pcdet v0.3
首先需要安装一个库,如torch等。使用阿里云加速
pip install -r requirements.txt -i https://mirrors.aliyun.com/pypi/simple注: 实际代码运行过程中需要用到cudatoolkit和cudnn这两个库,而requirements.txt这个文件中没有。如果电脑环境中已经安装的话,则不用管,没有的话需要安装一下。
本人使用conda进行安装的,命令如下:conda install cudatoolkit = 10.2 conda install cudnn = 7.6.5接下来这一步可能会出错:
python setup.py develop没有出问题的话,那就没事,如果出现了pcdet/ops/iou3d_nms/src/iou3d_cpu.cpp:12:18: fatal error: cuda.h: 这样的错误,可以参考这篇博客。
2、数据集准备
数据集的格式如下所示:
CaDDN
├── data
│ ├── kitti
│ │ │── ImageSets
│ │ │── training
│ │ │ ├──calib & velodyne & label_2 & image_2 & depth_2
│ │ │── testing
│ │ │ ├──calib & velodyne & image_2
├── pcdet
├── tools
可以先准备少一点的数据,比如300张图片。另外深度图需要下载 depth maps。如果没有梯子,可以去CSDN下载,我把这个深度数据上传了,不过只有300张深度图,仅作科研学术交流,如有侵权,可联系我删除。
执行如下命令生成data infos信息:
python -m pcdet.datasets.kitti.kitti_dataset create_kitti_infos tools/cfgs/dataset_configs/kitti_dataset.yaml
这里如果出现Assertion问题,可以看一看是calib还是图像的问题,ImageSets里train.txt、val.txt和test.txt与数据集中的数据是一一对应的,数据集中可以多数据,但不能没有ImageSets里包含的数据。比如在原始的train.txt中有0009这个文件,但是找不到对应标号的label文件,就会出现如下图所示的错误信息:
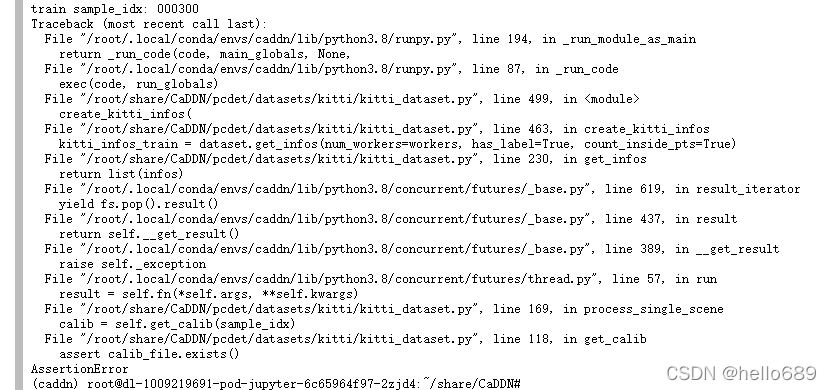
可以在看出是在kitti_dataset.py的118行get_calib出现了问题,因此找到此处代码,在assert前边加上一个print,这样再次运行,就可看出是少了哪个文件了,在train.txt或者val.txt删除就ok了。
def get_calib(self, idx):
calib_file = self.root_split_path / 'calib' / ('%s.txt' % idx)
# print(calib_file)
assert calib_file.exists()
return calibration_kitti.Calibration(calib_file)
一个一个的找出来删除太复杂,太麻烦了,我下边写了个脚本用来自动过滤掉一些文件不全的数据,生成新的/data/kitti/ImageSets/train.txt、val.txt和test.txt。
基本思想:
不考虑时间效率、空间效率,纯粹暴力来解决;
1. 读取原始train.txt中的数据,存放列表train_txt中,如果存在则值为1,否则为0;
2. 并读取calib、image_2等文件夹文件目录,获取文件名,存放相应的变量列表中;
3. 按照train_txt或者val_txt或test_txt循环,如果index对应的各个变量值都为1,则写入到新的train.txt文件中。
test清洗代码(代码仅供参考,实际用需要修改,另外train和val.txt生成时需要新加depth_2和label_2):
import numpy as np
import glob
N = 8000
train_txt = np.zeros(N)
calib = np.zeros(N)
image_2 = np.zeros(N)
velodyne = np.zeros(N)
root_path = '/home/CaDDN/data/kitti'
with open(root_path + "/ImageSets/test.txt", "r") as f:
for line in f.readlines():
line = int(line.strip('\n'))
train_txt[line] = 1
files = glob.glob(root_path+'/testing/calib/*.txt')
for file in files:
calib[int(file.split('/')[-1].split('.')[0])] = 1
files = glob.glob(root_path+'/testing/image_2/*.png')
for file in files:
image_2[int(file.split('/')[-1].split('.')[0])] = 1
files = glob.glob(root_path+'/testing/velodyne/*.bin')
for file in files:
velodyne[int(file.split('/')[-1].split('.')[0])] = 1
with open("test.txt", "w") as f:
for i in range(N):
if (calib[i] and image_2[i] and velodyne[i] and train_txt[i]):
f.write(str(i).zfill(6)+"\n")
3、训练一个模型
首先需要下载预训练模型 DeepLabV3 model,将其放入checkpoints文件下,其文件结构如下:
CaDDN
├── checkpoints
│ ├── deeplabv3_resnet101_coco-586e9e4e.pth
├── data
├── pcdet
├── tools
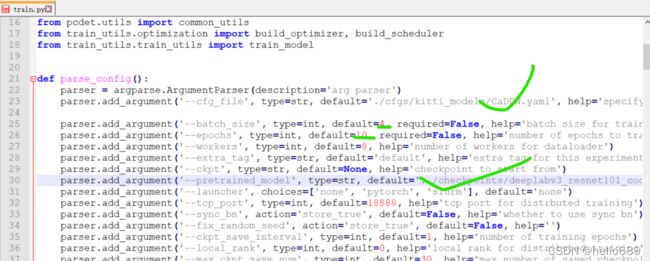
修改train.py
parser.add_argument('--cfg_file', type=str, default='./cfgs/kitti_models/CaDDN.yaml', help='specify the config for training')
parser.add_argument('--batch_size', type=int, default=4, required=False, help='batch size for training')
parser.add_argument('--epochs', type=int, default=10, required=False, help='number of epochs to train for')
parser.add_argument('--workers', type=int, default=8, help='number of workers for dataloader')
parser.add_argument('--extra_tag', type=str, default='default', help='extra tag for this experiment')
parser.add_argument('--ckpt', type=str, default=None, help='checkpoint to start from')
parser.add_argument('--pretrained_model', type=str, default='../checkpoints/deeplabv3_resnet101_coco-586e9e4e.pth', help='pretrained_model')
主要是修改配置文件路径,batch_size、epochs、预训练模型位置信息,如下图所示,另外这些信息也可以在CaDDN.yaml文件进行修改。
Terminal命令行中注意cd到tools目录下,开始训练:
python3.8 train.py
多卡训练的命令如下所示(数字4就是有4张卡):
python3.8 -m torch.distributed.launch --nproc_per_node=4 train.py --launcher 'pytorch'
注意,一定要用python3.8,直接用python可能会出错。
然后显存不够,Out Of Memery。

CaDDN代码调试-云环境
此云环境有1块V100(4核32G),应该不会出现显存不足的问题。
1、数据集打包上传
- 无法解压data目录下的文件
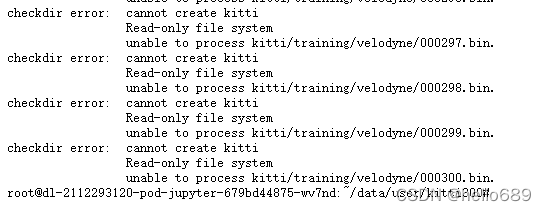
将其移动到share目录下,再进行解压。
cp 原文件地址 目标地址
2、环境配置
与本地配置类似,不过云服务器中的cuda什么是安装好的,cuda是10.1版本,经测试,也可以跑CaDDN代码,所以下边没有cuda的安装步骤直接。
- 首先测试了一块8G显存的GPU,最后还是显存不足的问题
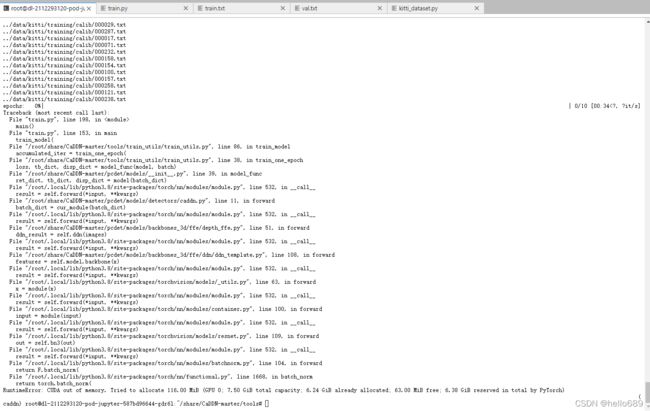

所以换了一块V100继续调试
3、错误信息

出现这种错误,以我的经验来看,解决方法有两个,可以按照下边的顺序来解决:
- 我用python运行出现过这种问题,应该是运行python3.8 train.py
- 因为使用了预训练的模型,预训练模型的model_state名字你是不知道的,但是代码里用了checkpoint[‘model_state’],我的解决办法是:
修改CaDDN/pcdet/models/detectors/detector3d_template.py的第359行,如下所示:
loc_type = torch.device('cpu') if to_cpu else None
checkpoint = torch.load(filename, map_location=loc_type)
#model_state_disk = checkpoint['model_state']
if 'version' in checkpoint:
logger.info('==> Checkpoint trained from version: %s' % checkpoint['version'])
update_model_state = {}
for key, val in checkpoint.items():
if key in self.state_dict() and self.state_dict()[key].shape == checkpoint[key].shape:
update_model_state[key] = val
# logger.info('Update weight %s: %s' % (key, str(val.shape)))
state_dict = self.state_dict()
state_dict.update(update_model_state)
self.load_state_dict(state_dict, False)
关于上边的解决办法,我参考了这几篇博客:
https://www.cnblogs.com/jinjunweina/p/12671833.html
成功运行
成功运行起来了,大功告成~~

训练这个真滴耗卡呀!

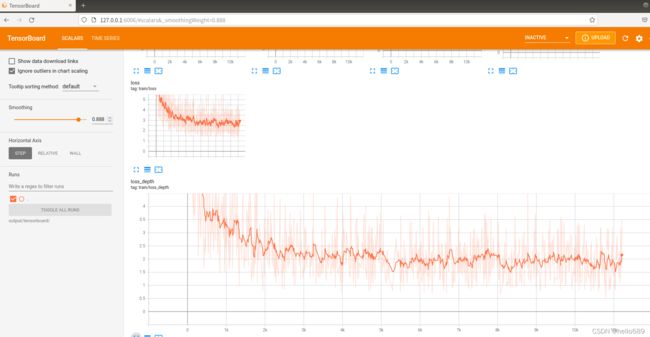
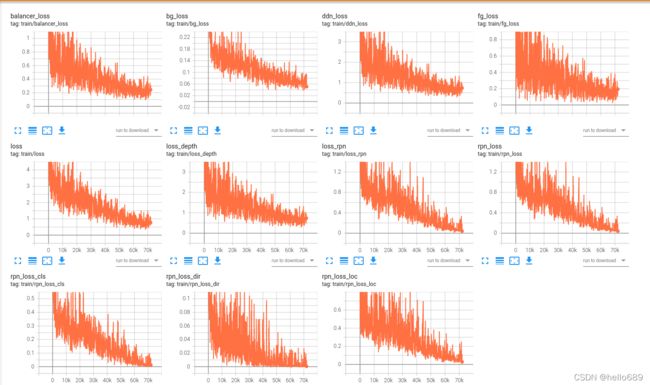
Tensorboard日志信息
训练完成后会有一个output文件夹,在里边可以找到一个tensorboard文件夹,此文件夹下存放了训练时的一些信息,可以用tensorboard进行可视化观察。我的tensorboard文件
运行命令:
tensorboard --logdir=output/tensorboard/ --host=127.0.0.1
模型评估:
Car类
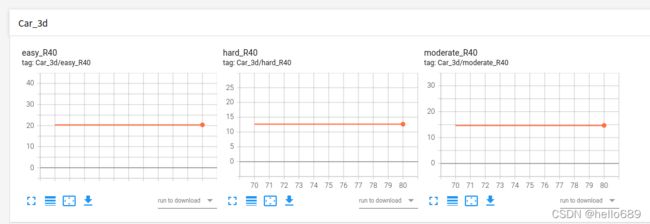 从我的评估结果来看,因为ckpt模型文件是从70epoch开始的,从图中可以看出,70-80epoch之间模型的3D检测结果基本是不变的。easy类达到20.36%,hard类达到12.65%,moderate类达到14.7%,与论文的结果基本一致。
从我的评估结果来看,因为ckpt模型文件是从70epoch开始的,从图中可以看出,70-80epoch之间模型的3D检测结果基本是不变的。easy类达到20.36%,hard类达到12.65%,moderate类达到14.7%,与论文的结果基本一致。
Cyclist类
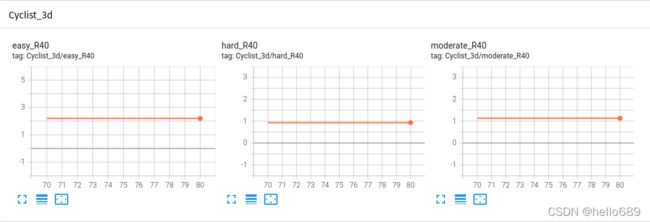
easy类:2.195% hard类:0.9287% moderate类:1.13%
Pedestrian类
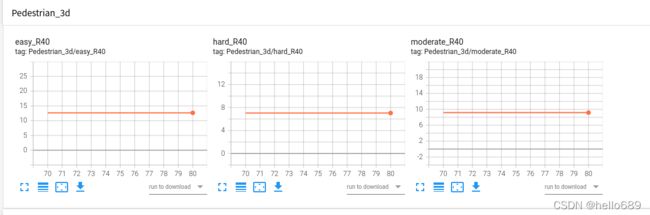 easy类:15.7% hard类:8.828% moderate类:11.38%
easy类:15.7% hard类:8.828% moderate类:11.38%
可视化demo
可视化之前需要安装open3d和mayavi两个库,命令如下:
pip install open3d -i https://mirrors.aliyun.com/pypi/simple
pip install vtk==9.0.1 -i https://mirrors.aliyun.com/pypi/simple
pip install mayavi==4.7.3 -i https://mirrors.aliyun.com/pypi/simple
CaDDN代码调试之 docker环境的安装
后期再来测试
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JB75hTKC-1639492974725)(imgs/image-20211213212330196.png)]](http://img.e-com-net.com/image/info8/c43b20330a5b408489865070726474cc.png)