「谷歌等」四足机器人2020重要研究进展+宇树狗舞蹈放送「AI工程落地」

作者:小A 来源:Unitree宇树科技
转载请联系作者
舞蹈时间-来自宇树科技的A1小狗
2020重要研究进展
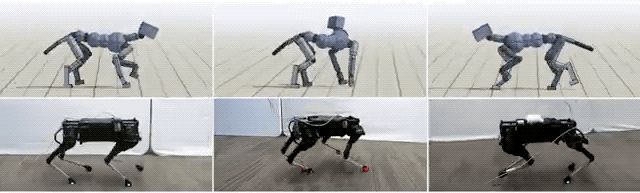
一、谷歌和加利福尼亚大学伯克利分校(Berkeley)深入研究了四足生物的运动姿态,利用强化学习方法将实验对象运动信息生成四足机器人运动控制程序,在仿真平台上得到了验证并移植到了Laikago实物机器人上。改进的算法使得四足机器人的运动性能和稳定性都得到提升,动作也更为自然。他们发表的论文入选了RSS 2020年度Best Paper。
二、来自英伟达、不列颠哥伦比亚大学、华盛顿大学、加州理工学院、得克萨斯大学奥斯汀分校和多伦多大学的学者设计出一种结合模型控制和强化学习的四足机器人分层运动控制器,使得机器人面对动态变化地表环境时能选择最优的步态,提升了适应能力,动作自然高效。也使得四足机器人在光滑地面上行走的更加稳定。

三、麻省大学的学者认为四足机器人在应急响应和灾害救助领域具有很大的潜力,因此需要四足机器人在不断变化的不稳定地面上依然可以行动自如。她们基于Laikago设计的控制器增强了机器人对不稳定动态路面的适应力。她们的论文发表在《ADVANCES IN MATHEMATICS》上,入围Best Student Paper奖。

四、南京航空航天大学、南丹麦大学和哥廷根大学的学者在Laikago基础上,设计了一种通用的运动控制神经网络框架,可以实现多种形态足式机器人的运动控制。他们的论文将在《IEEE Transaction on Neural Networks and Learning Systems》上发表。
五、英伟达公司的AI算法团队在Laikago上搭载了NVIDIA Jetson TX2 GPU处理器和Velodyne VL-16型3D激光雷达,构建出可自主导航和运动避障的智能四足机器人系统。

六、南方科技大学、香港大学、香港城市大学、马里兰大学帕克分校和华中科技大学的学者利用Laikago设计出一种人群密度监视和人群疏散机器人系统。在疫情期间,它可以用于监测人群聚集情况,提醒聚集人群保持社交距离。该系统还展现出优秀的跟随和避障性能。

相关论文
1、 Peng X B , Coumans E , Zhang T , et al. Learning Agile Robotic Locomotion Skills by Imitating Animals[J]. 2020.
2、 Da X Y , Xie Z M , Hoeller D , et al. Learning a Contact-Adaptive Controller for Robust, Efficient Legged Locomotion. arXiv:2009.10019[cs.RO].
3、 Iqbal A , Gao Y , Gu Y . Provably Stabilizing Controllers for Quadrupedal Robot Locomotion on Dynamic Rigid Platforms[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(4):2035-2044.
4、 Thor M , Kulvicius T and Manoonpong P , Generic Neural Locomotion Control Framework for Legged Robots , IEEE TRANSACTIONS ON NEURAL NETWORKS AND LEARNING SYSTEMS.
5、 Building an Intelligent Robot Dog with the NVIDIA Isaac SDK , NVIDIA Developer Blog.
6、 Fan T , Chen Z , Zhao X , et al. Autonomous Social Distancing in Urban Environments using a Quadruped Robot[J]. 2020.
7、A1模型插图来自:Planning in Learned Latent Action Spaces for Generalizable Legged Locomotion
历史精华好文
专辑1:AI工程落地
专辑2:AI核心算法
专辑3:AI优质资源
交流合作
请加微信号:yan_kylin_phenix,注明姓名+单位+从业方向+地点,非诚勿扰。
