砥砺的前行|基于labview的机器视觉图像处理|NI Vision Assisant(六)——Binary(二值图) 功能
文章目录
- 一、界面展示
- 二、功能介绍
-
- 2.1 Basic Morphology 基础形态学
- 2.2 Advanced Morphology 高级形态学
- 2.3 Binary Morphological Reconstruction 二值形态学重建(待)
- 2.4 Particle Filter 粒子过滤
- 2.5 Binary Image Invertion 反转二值图像
- 2.6 Particle Analysis 粒子分析
- 2.7 Shape Matching 形状匹配
- 2.8 Circle Detection 圆检测
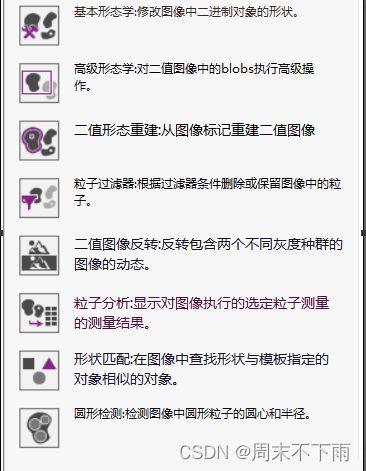
一、界面展示
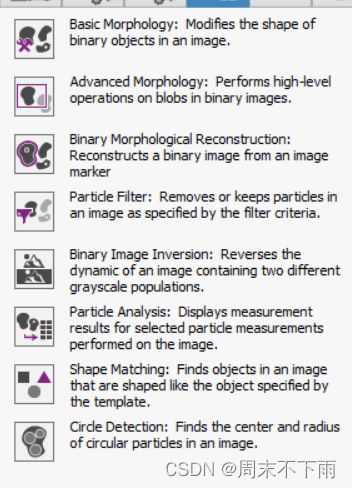
Binary功能只能处理二值化后的图像。其中有Basic Morphology 基础形态学、Advanced Morphology高级形态学、Binary Morphological Reconstruction:二值形态学重建、Particle Filter 粒子过滤、Binary Image Invertion反转二值图像、Particle Analysis粒子分析、Shape Matching形状匹配、Circle Detection圆检测
补充二值化
可以参考我前一篇的砥砺的前行|基于labview的机器视觉图像处理|NI Vision Assisant(五)——Grayscale(灰度图) 功能 的2.6 Threshold 阈值

二、功能介绍
提醒,先用类型转换变成二值图哈
2.1 Basic Morphology 基础形态学
影响二值图像中粒子形状。每个粒子或区域在单个基础形态学上都有影响。我们可以用这个函数完成诸如扩张、缩小目标,填充填洞,关闭粒子,平滑边界等工作,以便后续的图像定量分析。其中许多二值图中的形态学方法同灰度图中的形态学方法类似,可以参考。
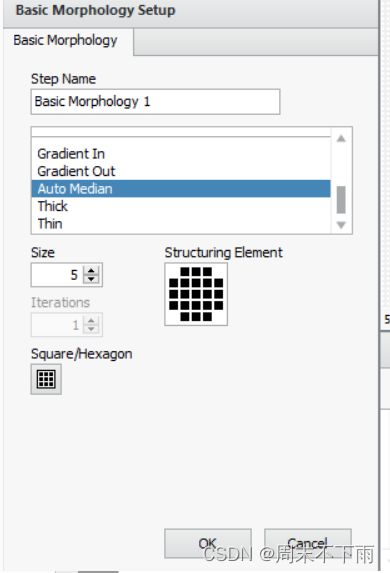
Image Source: 原始图像
Erode objects: 腐蚀目标。
Dilate objects: 膨胀目标。
Open: 开操作
Close: 闭操作
Proper Open: 适当开
Proper Close: 适当闭
Gradient In: 梯度内,提取粒子内部轮廓(梯度内,包含梯度)
Gradient Out: 梯度外,提取粒子外部轮廓( 梯度外)
Auto Median: 自动中值
Thick: 加粗,利用指定的掩模添加-.些粒子来改变目标的形状。可用于填充洞和沿着边缘正确的角度平滑目标。
Thin: 变细,利用指定的掩模消除一些粒子来改变目标形状。可用于消除背景上独立的像素和沿着边缘正确的角度平滑目标。
Structuring Element:掩模
Size: 掩模的尺寸
Iterations: 迭代次数
Square/Hexagon: 掩模形状,正方形和六边形。
Auto Median: 自动中值 处理如下

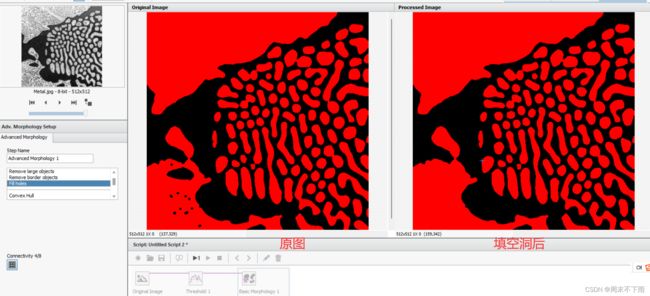
2.2 Advanced Morphology 高级形态学
对图像中的粒子执行高级的算法利用此函数可以完成去除小粒子,标记粒子,填洞

Image Source: 原始图像。
Remove small objects: 去除小目标。小目标由腐蚀数(Iterations 迭代)决定。
Remove large objects: 去除大目标。大目标由腐蚀数(Iterations 迭代)决定。
Remove border objects: 去除图像边缘上的粒子。
Fill holes: 填充洞。
Convex Hull: 计算目标的凸壳。经处理后,粒子没有凹下去的地方。
Skeleton: 骨架。骨架M函数会有较多的树枝突起,而骨架L函数会较少。SKIZ
算法同骨架M算法类似,但是会影响背景。此算法比较耗时。使用此算法时会有
Mode (方法)选项。
Separate objects: 分离目标。打断狭窄的峡并且分离接触的目标。
Label objects: 标记目标,以不同颜色将粒子标记出来。
Distance: 距离。给每个像素分配一一个灰度值,此值等于到目标边界的最短距离,
当然此目标可能会有孔洞。
Danielsson: 达尼森算法。同距离算法类似,但是其使用了更多精确的算法。
Segment image: 分割图像。将一幅图像分割成片段, 每个片段的中心都在目标上,
因此这些片段都不会重叠并且脱离空白区域。
而对于像Structuring Element掩模算子、Size 算子大小、Iterations 迭代、Connectivtiy4/8四八连通、Square/Hexagon 正方形/六边形等参数,前面已经介绍过,不做详细解释。.
使用Distance

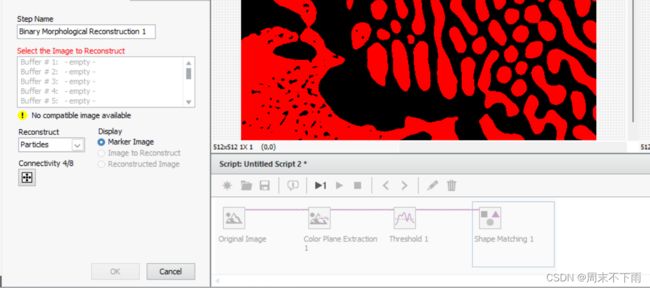
2.3 Binary Morphological Reconstruction 二值形态学重建(待)
老样子,问老师
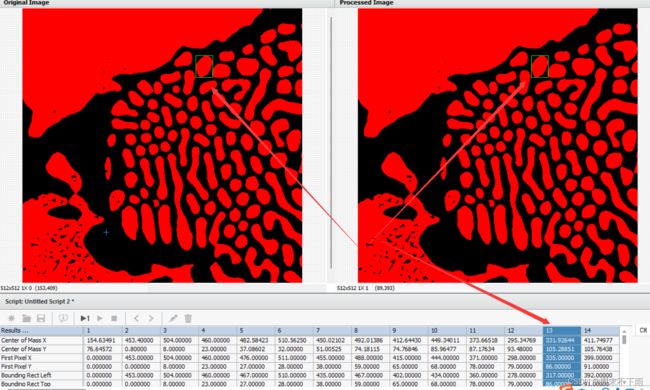
2.4 Particle Filter 粒子过滤
在图像二值化后,经过处理后,根据设置的条件,对粒子过滤,将满足条件的粒子去除或保留。
其中的参数有粒子过滤要求列表,参数范围(最小值、最大值)、坐标系(像素或真实)、不包括间隔(当选择时,范围为[-, 最小值]& [最大值,+ ], 当不选择时,范围为[最小值,最大值])、当前参数显示(最小值、最大值、平均值)、动作(去除、保留)、重置、连通方法等。除了第一个可选项较多,其它参数都简单明了,不多加解释。过滤要求列表解释如下所示。

你们自己看吧
Center of Mass X and Center of MassY:粒子质心的坐标(X、Y)
First Pixel X and First PixelY:粒子第一一点(粒子中最上最左的点)的坐标(X、Y)
Bounding Rect (Left, Right, Top, and Bottom)边界矩形(左右,上下)
Left:粒子最左边点坐标-X
Top:粒子最上边点坐标-Y
Right:粒子最右边点坐标-X .
Tottom:粒子最下边点坐标-Y
Max Feret Diameter Start X and Max Feret Diameter Start Y:最大FERET直径开始X
与Y坐标。Feret直径是指粒子周边最远两点间的距离。
Max Feret Diameter End X and Max Feret Diameter End Y:最大FERET直径结束X
与Y坐标。
Max Horiz. Segment Length (Left, Right, and Row) :最大水平段长(左X坐标、右
X坐标、Y坐标),即一个粒子中沿水平方向最长的那条线的左边点X,右边点X,
以及此线的Y坐标。
Bounding Rect (Width, Height, and Diagonal) :边界矩形(宽、高、对角线)
Perimeter:粒子的周长。由于粒子的边界是由离散的点组成的,视觉助手会二次抽
样边界点来逼近一条更平滑更正确的周长。
Convex Hull Perimeter:凸壳的周长。
Hole's Perimeter:粒子中所有洞的周长(和)。
Max Feret Diameter:粒子周边最远两点的距离。
Equivalent Ellipse (Major Axis, Minor Axis, and Minor Axis (Feret)) :等效椭圆(等
效椭圆长轴长度、短轴长度以及用Feret为长轴面积与粒子相等的椭圆的短轴)
Equivalent Rect (Long Side, Short Side, Diagonal, and Short Side (Feret)) :等效矩形
(长边、短边、对角线和以Feret为最长边面积与粒子相等的矩形的短边)
Average Horiz. Segment Length:粒子水平分割长度平均值。
Average Vert. Segment Length:粒子垂直分割长度平均值。
Hydraulic Radius:水力半径。水力半径=粒子面积/粒子周长。
Waddel Disk Diameter: Waddel 圆直径。即面积与粒子相等的圆的直径。
Area:粒子面积(不含洞)
Holes' Area:粒子中所有洞的面积
Particle & Holes' Area:粒子面积(包含内部的洞)
Convex Hull Area:凸壳面积
Image Area:图像面积
Number of Holes:粒子中洞的个数,精确到粒子中的-一个像素
Number of Horiz. Segments:粒子水平分割数。
Number of Vert. Segments:粒子垂直分割数
Orientation:方向。通过粒子的质心拥有最小惯性矩的直线(与水平方向)的角度。
Max Feret Diameter Orientation:最大Feret直径的方向。
%Area/ Image Area:粒子面积占图像面积的百分比
%Area/(Particle & Holes' Area):粒子面积占整个粒子面积(包含粒子与洞)的百分
比。
Ratio of Equivalent Ellipse Axes:等效椭圆轴的比率=长轴/短轴。
Ratio of Equivalent Rect Sides:等效矩形边的比率=长边/短边。
Elongation Factor:延长因子。最大Feret直径/等效矩形(Feret) 短边,越细长的
粒子,延长因子越大。
Compactness Factor:紧密因子=面积/外接矩形的面积。紧密因子范围在[0.1]之间。
粒子形状越接近矩形,紧密因子越接近1。
Heywood Circularity Factor:海伍德圆度因子=粒子周长/与粒子面积相等的圆周长,
粒子的形状越接近圆,海伍德圆度因子越接近1。
Type Factor:类型因子。和面积的惯性矩有关。
Angle:角度。延逆时针方向旋转与X轴的角度。范围[0°. 180%)。
Sum..:和。各种相对于X、Y轴的动量合。
Moment of Ineti...粒子质心动量。
Norm. Moment of Ineti...归- - 化惯性矩
Hu Moment..源于普通惯性矩测量。
这个效果还是很不错的
2.5 Binary Image Invertion 反转二值图像
使用这个函数反向动态的图像,使背景像素为粒子,使粒子为背景像素。

2.6 Particle Analysis 粒子分析
使用这个函数测量图像中的粒子形状。
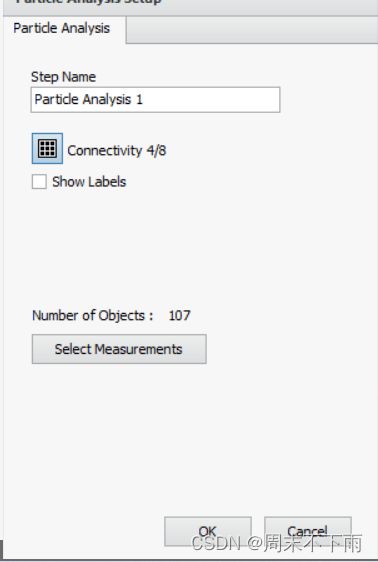

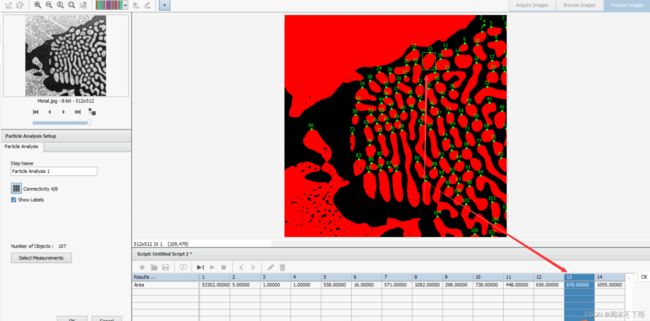
使用Select Measurements按钮选择要分析的参数,这里参数跟粒子过滤的参数是一样,可以参考

比如选择Area面积分析,将得到二值图像上所有粒子的面积

2.7 Shape Matching 形状匹配
使用这个函数来搜索图像的对象有-个类似于一个模板对象的形状。可以创建模板,加载模板,设置最小分数,标度不变性(如果选择,则无论大小,只要跟模板形状相匹配的都找出来)。

嗯,找的还是很准的
2.8 Circle Detection 圆检测
使用这个函数来找在一-个图像圆形粒子的中心和半径。

在这个面板,上可以得到圆的数量,设置半径范围为10-100,
