ORBSLAM2安装测试,及各种问题汇总
目录
一、安装测试
1.更新软件列表
2.配置c++编译环境
3.安装vscode
4.安装git
5.配置依赖环境
5.1安装Eigen3
5.2安装pangolin
5.3安装OpenCV
5.4 安装G2O
5.5安装 DBow2
5.6安装Ros1
6 安装ORBSLAM2
二 . 问题汇总
1.Pangolin时报错:‘No package ‘xkbcommon’ found’
2.error: ‘usleep’ was not declared in this scope usleep(5000);
3.collect2:error:id returued 1exit status
4. Eigen相关
5.fatal error:Eigen/Core: 没有那个文件或目录 #include
6. install cimpiler error:killed(program cciplus)
7. 其他
准备一个纯净的Ubuntu系统,如果是第一次安装,这样可以少采好多坑,好刚要用在刀把上(手动狗头),我的是18.04,各位按照自己的情况来,主要就是ros的版本,其他那一版都没多大影响。
一、安装测试
ORBSLAM2各个依赖项版本汇总
| 序号 | 依赖项 | 版本 | 地址 |
|---|---|---|---|
| 1 | pangolin | v0.5 | Tags · stevenlovegrove/Pangolin · GitHub (0z.gs) |
| 2 | Eigen3 | 3.3.4 | 3.3.4 · Tags · libeigen / eigen · GitLab |
| 3 | opencv | 3.4.1 | Release OpenCV 3.4.1 · opencv/opencv · GitHub (0z.gs) |
| 4 | DBow2 | v1.1-free | Release v1.1-free · dorian3d/DBoW2 · GitHub (0z.gs) |
| 5 | g2o | 20170730_git | Release 20170730_git · RainerKuemmerle/g2o · GitHub (0z.gs) |
| 6 | Ros | melodic | 小鱼的一键安装系列 | 鱼香ROS (fishros.org.cn) |
准备好各个依赖项后,开始安装
1.更新软件列表
sudo apt-get update
2.配置c++编译环境
sudo apt-get install gcc
sudo apt-get install g++
sudo apt-get install cmake3.安装vscode
进入vscode官网https://code.visualstudio.com/Download,在下载页,下载.deb文件。

找到下载的.deb文件,双击进行安装。
安装完成后,即可在主菜单下找到vscode,右键添加到收藏夹。

打开VScode进行配置

4.安装git
sudo apt-get install git5.配置依赖环境
5.1安装Eigen3
sudo apt-get install libeigen3-dev5.2安装pangolin
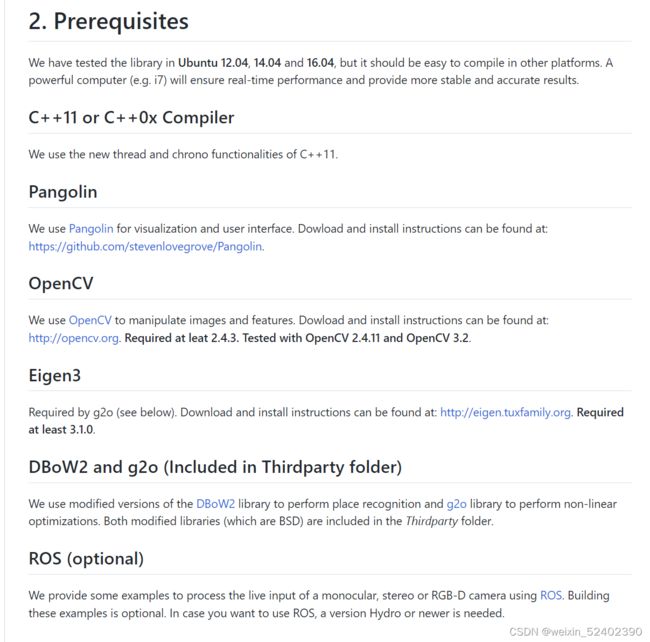
 根据官方给出的Dependencies,安装相关的依赖项,其中大部分依赖项是可选的,可更具自己的需求进行选择,如下是作者选择的安装的依赖项,这几项都是必须安装的。
根据官方给出的Dependencies,安装相关的依赖项,其中大部分依赖项是可选的,可更具自己的需求进行选择,如下是作者选择的安装的依赖项,这几项都是必须安装的。
~$ sudo apt-get install libglew-dev
~$ sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev进入放置下载文件的路径,解压安装包。
tar -zxvf Pangolin-0.5.tar.gz进入安装包文件夹进行安装
cd Pangolin-0.5
mkdir build
cd build
cmake ..
make
sudo make install安装成功。

5.3安装OpenCV
和安装pangolin一样,先从官网下载安装包,配置好必要的依赖项后,进行安装, 安装指令如下,具体操作看如下执行过程操作图片
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
sudo apt-get install ffmpeg
sudo apt-get install libavcodec-dev
sudo apt-get install libavformat-dev
sudo apt-get install libswscale-dev
//可选项
sudo apt-get install libjpeg-dev libpng-dev libtiff-dev
//安装
tar -zxvf opencv-3.4.1.tar.gz
cd opencv-3.4.1
mkdir build
cd build
cmake ..
make -j2
sudo make install
//配置编译环境
sudo gedit /etc/ld.so.conf.d/opencv.conf
/usr/local/lib
sudo ldconfig
sudo gedit /etc/bash.bashrc
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
source /etc/bash.bashrc
sudo updatedb
执行过程如下:
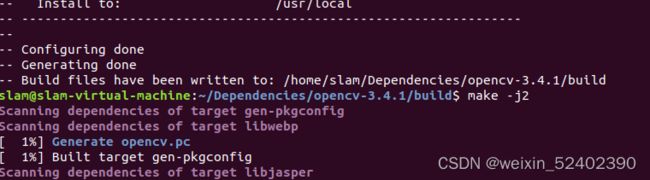
编译成功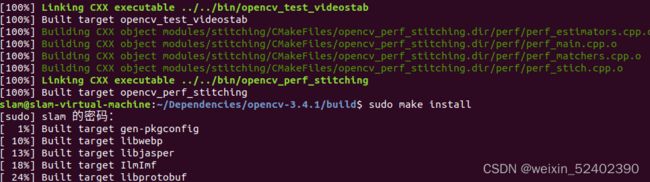
安装
配置编译环境


5.4 安装G2O
同上下载安装包,然后按照官方提供的依赖项依次安装
//安装依赖项
sudo apt-get install libsuitesparse-dev
sudo apt-get install qtdeclarative5-dev
sudo apt-get install qt5-qmake
sudo apt-get install libqglviewer-dev-qt5
//解压安装包
tar -zxvf g2o-20170730_git.tar.gz
cd g2o-20170730_git/
//安装
mkdir build
cd build
cmake ..
make
编译成功即可。

5.5安装 DBow2
同样先下载安装包,然后编译
tar -zxvf DBoW2-1.1-free.tar.gz
cd DBoW2-1.1-free/
mkdir build
cd build
cmake ..
make -j2
sudo make install执行过程如下图

5.6安装Ros1
Ros安装使用小鱼的一键安装系列 | 鱼香ROS (fishros.org.cn)
一步到位,不再多说。
6 安装ORBSLAM2
新建ros工作空间,在ros工作空间下下载源码
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2

设置build.sh文件权限
chmod +x build.sh
编译
。/build.sh
make -j2成功后下载数据集测试,运行代码如下(注意:不同的数据集对应不同的配置文件)
//可执行文件路径 词典路径 配置文件路径 数据集路径
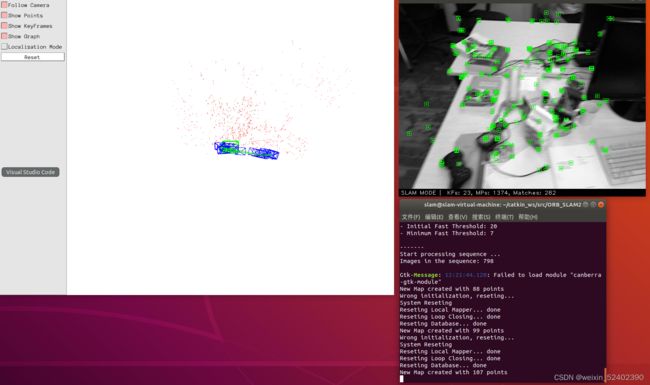
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/slam/Data/rgbd_dataset_freiburg1_xyz
运行成功
二 . 问题汇总
1.Pangolin时报错:‘No package ‘xkbcommon’ found’
2.error: ‘usleep’ was not declared in this scope usleep(5000);
3.collect2:error:id returued 1exit status
问题1~3的解决方法:(45条消息) Ubuntu18.04 ORB_SLAM2的安装、配置、运行SLAM单目实例_君琴的博客-CSDN博客
4. Eigen相关
Build type: Debug
CMake Error at CMakeLists.txt:45 (find_package):
Found package configuration file:
/usr/local/lib/cmake/Pangolin/PangolinConfig.cmake
but it set Pangolin_FOUND to FALSE so package "Pangolin" is considered to
be NOT FOUND. Reason given by package:
Pangolin could not be found because dependency Eigen3 could not be found.
5.fatal error:Eigen/Core: 没有那个文件或目录 #include

解决方法: Pangolin版本问题,更换 Pangolin版本
(45条消息) Ubuntu18.04 编译 ORB-SLAM2(./build.sh + ./build_ros.sh)完整流程,各种报错处理(踩坑总结)_m0_60355964的博客-CSDN博客_./build_ros.sh
6. install cimpiler error:killed(program cciplus)
解决方法:关机重启
(45条消息) ORB-SLAM2项目的准备工作及其程序的编译(途中解决各种疑难杂症)_心清似水淡若云、的博客-CSDN博客
7. 其他
其他问题我还没碰到过,大家可以参考上面两个文章。
参考资料:
(50条消息) Ubuntu16.04下配置VScode的C/C++开发环境_WavenZ的博客-CSDN博客_ubuntu vscode配置c++环境 https://blog.csdn.net/weixin_43374723/article/details/84064644?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522165182929616781683930040%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=165182929616781683930040&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-2-84064644-null-null.142%5Ev9%5Epc_search_result_cache,157%5Ev4%5Econtrol&utm_term=ubuntu%E9%85%8D%E7%BD%AEc%2B%2B%E7%8E%AF%E5%A2%83&spm=1018.2226.3001.4187
https://blog.csdn.net/weixin_43374723/article/details/84064644?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522165182929616781683930040%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=165182929616781683930040&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-2-84064644-null-null.142%5Ev9%5Epc_search_result_cache,157%5Ev4%5Econtrol&utm_term=ubuntu%E9%85%8D%E7%BD%AEc%2B%2B%E7%8E%AF%E5%A2%83&spm=1018.2226.3001.4187