【三维重建】三维重建学习笔记(5)—— 双目立体视觉系统
第五章 双目立体视觉系统
一、平行视图
1. 基础矩阵的另一种形式
之前定义了基础矩阵\(F={{{K}'}^{-T}}[{{T}_{\times }}]R{{K}^{-1}}\)
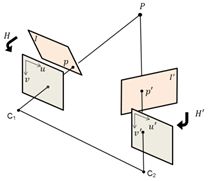
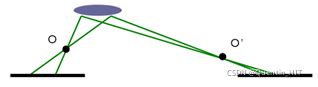
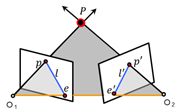 极几何
极几何
不妨设世界坐标系和\({{O}_{1}}\)摄像机坐标系重合,\({e}'\)可以看成是\({{O}_{1}}\)在第二个像平面上投影的结果。因此可以得到:\[{e}'={K}'\left[ \begin{matrix} R & T \\\end{matrix} \right]\left[ \begin{matrix} 0 \\ 0 \\ 0 \\ 1 \\\end{matrix} \right]={K}'T\]
另外,数学上有叉乘性质:对于任何向量\(t\),如果\(M\)可逆,相差一个尺度的情况下:
\[\left[ {{t}_{\times }} \right]M={{M}^{-T}}\left[ {{({{M}^{-1}}t)}_{\times }} \right]\]
令\(t=T,M={{{K}'}^{-1}}\),则\(\left[ {{T}_{\times }} \right]{{{K}'}^{-1}}={{{K}'}^{T}}\left[ {{({K}'T)}_{\times }} \right]\),即\(\left[ {{T}_{\times }} \right]={{{K}'}^{T}}\left[ {{({K}'T)}_{\times }} \right]{K}'\)
因此\(F={{{K}'}^{-T}}[{{T}_{\times }}]R{{K}^{-1}}={{{K}'}^{-T}}{{{K}'}^{T}}\left[ {{({K}'T)}_{\times }} \right]{K}'R{{K}^{-1}}=\left[ {{({K}'T)}_{\times }} \right]{K}'R{{K}^{-1}}=\left[ {{{{e}'}}_{\times }} \right]{K}'R{{K}^{-1}}\)
由此,基础矩阵的另一种形式如下:\[F=\left[ {{{{e}'}}_{\times }} \right]{K}'R{{K}^{-1}}\]
2. 极几何特例:平行视图
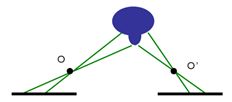
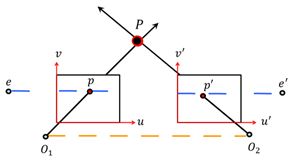 平行视图
平行视图
不妨设\(K={K}'\),\(R=I\),\(T=\left[ \begin{matrix} T \\ 0 \\ 0 \\\end{matrix} \right]\),\({e}'=\left[ \begin{matrix} 1 \\ 0 \\ 0 \\\end{matrix} \right]\),
则\(F=\left[ {{{{e}'}}_{\times }} \right]{K}'R{{K}^{-1}}=\left[ \begin{matrix} 0 & 0 & 0 \\ 0 & 0 & -1 \\ 0 & 1 & 0 \\\end{matrix} \right]\)
极线\(l={{F}^{T}}{p}'=\left[ \begin{matrix} 0 & 0 & 0 \\ 0 & 0 & 1 \\ 0 & -1 & 0 \\\end{matrix} \right]\left[ \begin{matrix} {{{{p}'}}_{u}} \\ {{{{p}'}}_{v}} \\ 1 \\\end{matrix} \right]=\left[ \begin{matrix} 0 \\ 1 \\ -{{{{p}'}}_{v}} \\\end{matrix} \right]\)
\({{{p}'}^{T}}Fp=0\Rightarrow \left[ \begin{matrix} {{{{p}'}}_{u}} & {{{{p}'}}_{v}} & 1 \\\end{matrix} \right]\left[ \begin{matrix} 0 & 0 & 0 \\ 0 & 0 & -1 \\ 0 & 1 & 0 \\\end{matrix} \right]\left[ \begin{matrix} u \\ v \\ 1 \\\end{matrix} \right]=0\Rightarrow {{p}_{v}}={{{p}'}_{v}}\)
由上面两行,极线是水平的且平行于\(u\)轴,\(p\)和\({p}'\)的\(v\)坐标一样。因此\({p}'\)点沿着扫描线寻找即可。
3. 平行视图的三角测量
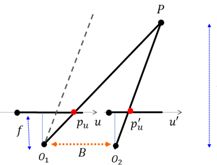 平行视图模型的俯视图
平行视图模型的俯视图
由相似关系可得:\[{{p}_{u}}-{{{p}'}_{u}}=\frac{Bf}{z}\]
定义视差为\({{p}_{u}}-{{{p}'}_{u}}\),则可以很容易地从视差得到深度信息,且视差与深度\(z\)成反比。
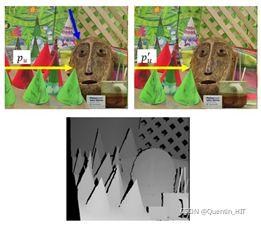 视差图与深度图
视差图与深度图
注意:
由于遮挡现象的存在,因此部分点的深度信息是无法获取的,在深度图中对应黑色像素部分。
二、图像校正
1. 校正目标
求解\(H\)和\({H}'\)使得变换后的图像的与基线平行的平面共面,且极线平行于\(u\)轴。
 图像校正
图像校正
2. 图像校正的步骤
1. 在两幅图像\(I\)和\({I}'\)找到一组匹配点\({{p}_{i}}\leftrightarrow {{{p}'}_{i}}\),不少于8个。
2. 计算基础矩阵\(F\)(八点算法等),求解两幅图像中的极点\(e\)和\({e}'\)
求解\(e\):第一步,\({{l}_{i}}={{F}^{T}}{{{p}'}_{i}}\);第二步,解方程\(\left[ \begin{matrix} {{l}_{1}} \\ \vdots \\ {{l}_{n}} \\\end{matrix} \right]e=0\)
求解\({e}'\):第一步,\({{{l}'}_{i}}=F{{p}_{i}}\);第二步,解方程\(\left[ \begin{matrix} {{l}_{1}}{{^{\prime }}^{T}} \\ \vdots \\ {{l}_{n}}{{^{\prime }}^{T}} \\\end{matrix} \right]{e}'=0\)
3. 选择透视变换\({H}'={{T}^{-1}}GRT\)将\({e}'\)映射到无穷远点\((f,0,0)\)
\[T=\left[ \begin{matrix} 1 & 0 & -\frac{width}{2} \\ 0 & 1 & -\frac{height}{2} \\ 0 & 0 & 1 \\\end{matrix} \right]\]
变换后\({e}'\)的齐次坐标为\(({{{e}'}_{1}},{{{e}'}_{2}},1)\)
\[R=\left[ \begin{matrix} \alpha \frac{{{{{e}'}}_{1}}}{\sqrt{{{{{e}'}}_{1}}^{2}+{{{{e}'}}_{2}}^{2}}} & \alpha \frac{{{{{e}'}}_{2}}}{\sqrt{{{{{e}'}}_{1}}^{2}+{{{{e}'}}_{2}}^{2}}} & 0 \\ -\alpha \frac{{{{{e}'}}_{2}}}{\sqrt{{{{{e}'}}_{1}}^{2}+{{{{e}'}}_{2}}^{2}}} & \alpha \frac{{{{{e}'}}_{1}}}{\sqrt{{{{{e}'}}_{1}}^{2}+{{{{e}'}}_{2}}^{2}}} & 0 \\ 0 & 0 & 1 \\\end{matrix} \right]\]
\({{{e}'}_{1}}>0\)时\(\alpha =1\),反之\(\alpha =1\),变换后\({e}'\)的齐次坐标为\((f,0,1)\)
\[G=\left[ \begin{matrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ -\frac{1}{f} & 0 & 1 \\\end{matrix} \right]\]
变换后\({e}'\)的齐次坐标为\((f,0,0)\)
4. 寻找对应的透视变换矩阵\(H\)使得\(\sum\limits_{i}{d(H{{p}_{i}},{H}'{{{{p}'}}_{i}})}\)最小,以确保变换后的图像的与基线平行的平面共面。
5. 分别用矩阵\(H\)和\({H}'\),对左右两幅图像\(I\)和\({I}'\)进行重采样。
 图像校正
图像校正
三、对应点搜索
1. 相关匹配法
 对应点搜索
对应点搜索
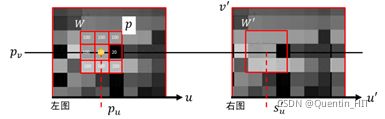
- 在左图中\(p=({{p}_{u}},{{p}_{v}})\)处选择一个3×3(也可是5×5等)窗口\(W\),展开成9×1向量:\[w={{\left[ \begin{matrix} 100 & 100 & 100 & 100 & 100 & 20 & 160 & 180 & 200 \\\end{matrix} \right]}^{T}}\]
- 在右图中沿扫描线在每个位置\({{{s}'}_{u}}\)处建立窗口\({W}'\),并获得\(w'\)向量;
- 计算每个\({{{s}'}_{u}}\)位置\({{w}^{T}}{w}'\)的值;
- \({{{p}'}_{u}}=\arg \underset{{{{{s}'}}_{u}}}{\mathop{\max }}\,{{w}^{T}}{w}'\),即\({{w}^{T}}{w}'\)最大的点为\({{p}_{u}}\)所对应的\({{{p}'}_{u}}\)。
2. 归一化匹配法
相关匹配法的问题:窗口中的像素的灰度值发生剧烈变化
- 在左图中\(p=({{p}_{u}},{{p}_{v}})\)处选择一个3×3(也可是5×5等)窗口\(W\),展开成9×1向量:\[w={{\left[ \begin{matrix} 100 & 100 & 100 & 100 & 100 & 20 & 160 & 180 & 200 \\\end{matrix} \right]}^{T}}\]并计算灰度均值\(\bar{w}\);
- 在右图中沿扫描线在每个位置\({{{s}'}_{u}}\)处建立窗口\({W}'\),并获得\(w'\)向量,计算灰度均值\(\bar{{w}'}\);
- 计算每个\({{{s}'}_{u}}\)位置\(\frac{{{(w-\bar{w})}^{T}}({w}'-{\bar{w}}')}{\left\| w-\bar{w} \right\|\left\| {w}'-{\bar{w}}' \right\|}\)的值;
- \({{{p}'}_{u}}=\arg \underset{{{{{s}'}}_{u}}}{\mathop{\max }}\,\frac{{{(w-\bar{w})}^{T}}({w}'-{\bar{w}}')}{\left\| w-\bar{w} \right\|\left\| {w}'-{\bar{w}}' \right\|}\),即\(\frac{{{(w-\bar{w})}^{T}}({w}'-{\bar{w}}')}{\left\| w-\bar{w} \right\|\left\| {w}'-{\bar{w}}' \right\|}\)最大的点为\({{p}_{u}}\)所对应的\({{{p}'}_{u}}\)。
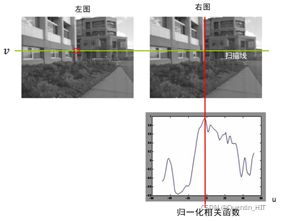 归一化函数示例
归一化函数示例
3. 窗口\(W\)大小的影响
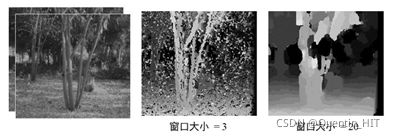 窗口大小的影响
窗口大小的影响
较小的窗口细节丰富,但是有更多的噪声;
较大的窗口视差图更平滑、噪声更小,但是会丢失细节。
4. 相关法存在的问题
1. 透视缩短
 透视缩短
透视缩短
2. 遮挡问题
 遮挡问题
遮挡问题
为了减少透视缩短和遮挡的影响,希望有更小的\(\frac{B}{z}\)比值。但是,当\(\frac{B}{z}\)小时,测量值的小误差意味着估算深度的大误差。
 估算深度的大误差
估算深度的大误差
3. 同质区域
 同质区域
同质区域
4. 重复模式
 重复模式
重复模式
5. 引入更多的约束解决对应点问题
- 唯一性约束:一张图像中的任何点,在另一张图像中最多只有一个匹配点
- 顺序约束/单调性约束:左右视图中的对应点次序一致
- 平滑性约束:视差函数通常是平滑的(除了遮挡边界)
第六章 多视图几何
一、运动结构恢复问题(Structure From Motion)
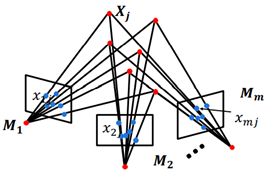
1. 问题概述
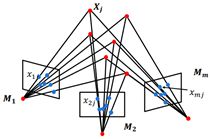 运动结构恢复
运动结构恢复
已知:
\(n\)个3D点\({{X}_{j}}\)在m张图像中的对应点的像素坐标\({{x}_{ij}}(i=1,...,m,j=1,...,n)\),且\({{x}_{ij}}={{M}_{i}}{{X}_{j}}(i=1,...,m,j=1,...,n)\)。其中,\({{M}_{i}}\)为第\(i\)张图片对应的摄像机的投影矩阵。
求解:
运动(motion):\(m\)个摄像机的投影矩阵\({{M}_{i}}(i=1,...,m)\);
结构(structure):\(n\)个三维点\({{X}_{j}}(j=1,...,n)\)的坐标。
2. 三种典型的运动恢复结构任务
- 欧式结构恢复
适用条件:摄像机内参数已知,外参数未知
背景:扫地机器人或者无人驾驶车上,可以预先标定好相机的内参数
- 仿射结构恢复
适用条件:摄像机为仿射相机,内、外参数均未知
背景:待重构物体离摄像机较远,待重构物体或者场景深度变化不大(仿射相机参数更少,恢复起来更简洁)
- 透视结构恢复
适用条件:摄像机为透视相机,内、外参数均未知
背景:互联网上下载一组图片,不知道相机具体参数
二、欧式结构恢复(摄像机内参数已知,外参数未知)
1. 欧式结构恢复问题
已知:
\(n\)个3D点\({{X}_{j}}\)在\(m\)张图像中的对应点的像素坐标\({{x}_{ij}}(i=1,...,m,j=1,...,n)\),且\({{x}_{ij}}={{M}_{i}}{{X}_{j}}={{K}_{i}}\left[ \begin{matrix} {{R}_{i}} & {{T}_{i}} \\\end{matrix} \right]{{X}_{j}}(i=1,...,m,j=1,...,n)\)。其中,\({{M}_{i}}\)为第\(i\)张图片对应的摄像机的投影矩阵。
求解:
\(m\)个摄像机的外参数\({{R}_{i}}\)及\({{T}_{i}}(i=1,...,m)\);
\(n\)个三维点\({{X}_{j}}(j=1,...,n)\)的坐标。
2. 欧式结构恢复问题(两视图)
问题:
\(\begin{align} & {{x}_{1j}}={{M}_{1}}{{X}_{j}}={{K}_{1}}\left[ \begin{matrix} I & 0 \\\end{matrix} \right]{{X}_{j}} \\ & {{x}_{2j}}={{M}_{2}}{{X}_{j}}={{K}_{2}}\left[ \begin{matrix} R & T \\\end{matrix} \right]{{X}_{j}}(j=1,...,n) \\ \end{align}\)
求解:
- 求解基础矩阵\(F\):归一化八点法
- 利用\(F\)与摄像机内参数求解本质矩阵\(E\):\(E={{K}_{2}}^{T}F{{K}_{1}}\)
- 分解本质矩阵获得\(R\)与\(T\):\(E\to R,T\)
- 三角化求解三维点\({{X}_{j}}\)坐标:\({{X}_{j}}^{*}=\underset{{{X}_{j}}}{\mathop{\arg \min }}\,(d({{x}_{1j}},{{M}_{1}}{{X}_{j}})+d({{x}_{2j}},{{M}_{2}}{{X}_{j}}))\)
3. 本质矩阵分解
步骤1:SVD分解→\(E=U\text{diag}(1,1,0){{V}^{T}}\)
步骤2:
\(R=\left[ \det (UW{{V}^{T}}) \right]UW{{V}^{T}}orR=\left[ \det (U{{W}^{T}}{{V}^{T}}) \right]U{{W}^{T}}{{V}^{T}}\),其中\(W=\left[ \begin{matrix} 0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \\\end{matrix} \right]\)
\(T=\pm {{u}_{3}}\)(\({{u}_{3}}\)为\(U\)的第三列)
步骤3:
\[\left\{ \begin{matrix} R=\left[ \det (UW{{V}^{T}}) \right]UW{{V}^{T}},T={{u}_{3}} \\ R=\left[ \det (UW{{V}^{T}}) \right]UW{{V}^{T}},T=-{{u}_{3}} \\ R=\left[ \det (U{{W}^{T}}{{V}^{T}}) \right]U{{W}^{T}}{{V}^{T}},T={{u}_{3}} \\ R=\left[ \det (U{{W}^{T}}{{V}^{T}}) \right]U{{W}^{T}}{{V}^{T}},T=-{{u}_{3}} \\\end{matrix} \right.\]
注意:
- 选择一个点三角化,正确的一组解能保证该点在两个摄像机的\(z\)坐标均为正。
- 对多个点进行三角化,选择在两个摄像机系下\(z\)坐标均为正的个数最多的那组\(R,T\),这样比对一个点三角化更鲁棒。
步骤4:通过重建单个或多个点找出正确解
4. 欧式结构恢复的歧义问题
 度量重构
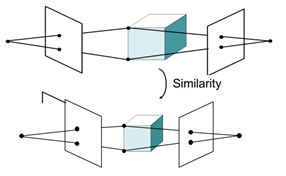
度量重构
- 欧式结构恢复无法估计场景的绝对尺度;
- 恢复出来的欧式结构与真实场景之间相差一个相似变换(旋转,平移,缩放);
- 恢复的场景与真实场景之间仅存在相似变换的重构称为度量重构。
三、仿射结构恢复(内、外参数均未知)
1. 仿射摄像机模型
\(x=MX=\left[ \begin{matrix} {{m}_{1}} \\ {{m}_{2}} \\ {{m}_{3}} \\\end{matrix} \right]X\),\(M=\left[ \begin{matrix} {{m}_{1}} \\ {{m}_{2}} \\ {{m}_{3}} \\\end{matrix} \right]=\left[ \begin{matrix} {{A}_{2\times 3}} & {{b}_{2\times 1}} \\ {{0}_{1\times 3}} & 1 \\\end{matrix} \right]=\left[ \begin{matrix} {{m}_{1}} \\ {{m}_{2}} \\ \begin{matrix} 0 & 0 & 0 & 1 \\\end{matrix} \\\end{matrix} \right]\),
由于\({{m}_{3}}X=1\),故\({{x}_{E}}={{({{m}_{1}}X,{{m}_{2}}X)}^{T}}=\left[ \begin{matrix} A & b \\\end{matrix} \right]X=\left[ \begin{matrix} A & b \\\end{matrix} \right]\left[ \begin{matrix} x \\ y \\ z \\ 1 \\\end{matrix} \right]=A{{X}^{E}}+b\),
其中,\({{x}_{E}}\)代表像素点的欧式坐标,\({{X}^{E}}\)代表空间点的欧式坐标。
2. 仿射结构恢复问题
已知:
\(n\)个3D点\({{X}_{j}}\)在\(m\)张图像中的对应点的像素坐标\({{x}_{ij}}(i=1,...,m,j=1,...,n)\),且\({{x}_{ij}}={{A}_{i}}{{X}_{j}}+{{b}_{i}}(i=1,...,m,j=1,...,n)\)。其中,\({{A}_{i}},{{b}_{i}}\)组成了第\(i\)张图片对应的仿射摄像机的投影矩阵\({{M}_{i}}=\left[ \begin{matrix} {{A}_{i}} & {{b}_{i}} \\ 0 & 1 \\\end{matrix} \right]\)。
求解:
\(m\)个仿射摄像机的投影矩阵\({{A}_{i}},{{b}_{i}}(i=1,...,m)\);
\(n\)个三维点\({{X}_{j}}(j=1,...,n)\)的坐标。
 仿射结构恢复问题
仿射结构恢复问题
3. 利用因式分解法求解
设3D点的质心=世界坐标系的中心。
首先对图像点中心化,即减去图像点的质心:\({{\hat{x}}_{ij}}={{x}_{ij}}-{{\bar{x}}_{i}}\),\({{\bar{x}}_{i}}=\frac{1}{n}\sum\limits_{k=1}^{n}{{{x}_{ik}}}\)。
把去均值以后的\(m\times n\)个测量值写成\(2m\times n\)矩阵的形式:
\[D={{\left[ \begin{matrix} {{{\hat{x}}}_{11}} & {{{\hat{x}}}_{12}} & \cdots & {{{\hat{x}}}_{1n}} \\ {{{\hat{x}}}_{21}} & {{{\hat{x}}}_{22}} & \cdots & {{{\hat{x}}}_{2n}} \\ \vdots & \vdots & \ddots & \vdots \\ {{{\hat{x}}}_{m1}} & {{{\hat{x}}}_{m2}} & \cdots & {{{\hat{x}}}_{mn}} \\\end{matrix} \right]}_{2m\times n}}={{\left[ \begin{matrix} {{A}_{1}} \\ {{A}_{2}} \\ \vdots \\ {{A}_{m}} \\\end{matrix} \right]}_{2m\times 3}}{{\left[ \begin{matrix} {{X}_{1}} & {{X}_{2}} & \cdots & {{X}_{n}} \\\end{matrix} \right]}_{3\times n}}\]
其中,\(M={{\left[ \begin{matrix} {{A}_{1}} \\ {{A}_{2}} \\ \vdots \\ {{A}_{m}} \\\end{matrix} \right]}_{2m\times 3}}\) ,\(S={{\left[ \begin{matrix} {{X}_{1}} & {{X}_{2}} & \cdots & {{X}_{n}} \\\end{matrix} \right]}_{3\times n}}\)。
若分解矩阵\(D={{U}_{3}}{{W}_{3}}{{V}_{3}}^{T}\),则\(M={{U}_{3}},S={{W}_{3}}{{V}_{3}}^{T}\)。
4. 仿射结构恢复歧义
由于奇异值分解不唯一,通过以下变换可以得到相同的\(D\):
\[\begin{align} & {{M}^{*}}=MH \\ & {{S}^{*}}={{H}^{-1}}S \\ \end{align}\]
其中,\(H\)是任意可逆的3×3矩阵。
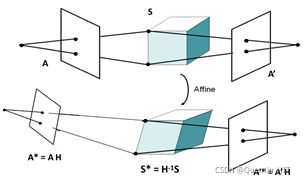 仿射结构恢复歧义问题
仿射结构恢复歧义问题
四、透射结构恢复(内、外参数均未知)
1. 透视结构恢复问题
已知:
\(n\)个3D点\({{X}_{j}}\)在\(m\)张图像中的对应点的像素坐标\({{x}_{ij}}(i=1,...,m,j=1,...,n)\),且\({{x}_{ij}}={{M}_{i}}{{X}_{j}}(i=1,...,m,j=1,...,n)\)。其中,\({{M}_{i}}\)为第\(i\)张图片对应的摄像机的投影矩阵。
求解:
\(m\)个摄像机的投影矩阵\({{M}_{i}}(i=1,...,m)\);
\(n\)个三维点\({{X}_{j}}(j=1,...,n)\)的坐标。
 透视结构恢复问题
透视结构恢复问题
2. 透视结构恢复歧义
\({{x}_{ij}}={{M}_{i}}{{X}_{j}}=({{M}_{i}}{{H}^{-1}})(H{{X}_{j}})={{M}^{*}}{{X}^{*}}\),其中,\(H\)是任意可逆的4×4矩阵。
故透视结构恢复方法只能是在相差一个4×4的可逆变换的情况下恢复摄像机运动与场景结构。
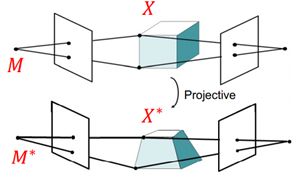 透视结构恢复歧义
透视结构恢复歧义
3. 代数方法(两视图)
求解:
- 求解基础矩阵\(F\):归一化八点法
- 利用\(F\)估计摄像机矩阵:\(F\to {{M}_{1}},{{M}_{2}}\)
- 三角化求解三维点\({{X}_{j}}\)坐标:\({{X}_{j}}^{*}=\underset{{{X}_{j}}}{\mathop{\arg \min }}\,(d({{x}_{1j}},{{M}_{1}}{{X}_{j}})+d({{x}_{2j}},{{M}_{2}}{{X}_{j}}))\)
 两视图情况
两视图情况
在已经由归一化八点法算出\(F\)的前提下,假设\(b\)为\({{F}^{T}}\)矩阵最小奇异值的右奇异向量,且\(\left\| b \right\|=1\),则摄像机矩阵:
\[{{\tilde{M}}_{1}}=\left[ \begin{matrix} I & 0 \\\end{matrix} \right]\]
\[{{\tilde{M}}_{2}}=\left[ \begin{matrix} -\left[ {{b}_{\times }} \right]F & b \\\end{matrix} \right]\]
另外,也可以通过如仿射结构恢复问题中的因式分解法求解。
4. 代数方法(N视图)
 N视图情况
N视图情况
分别对每一个图像对\({{I}_{k}}\)与\({{I}_{h}}\)计算运动与结构:
\[{{I}_{k}},{{I}_{h}}\to {{\tilde{M}}_{k}},{{\tilde{M}}_{h}},{{\tilde{X}}_{[k,h]}}\]
5. 捆绑调整
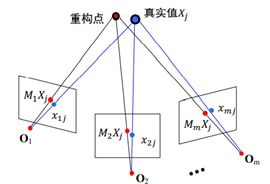 捆绑调整
捆绑调整
最小化重投影误差:
\[E(M,X)=\sum\limits_{i=1}^{m}{\sum\limits_{j=1}^{n}{D{{({{x}_{ij}},{{M}_{i}}{{X}_{j}})}^{2}}}}\]
可利用牛顿法或L-M方法求解。
实际操作中,捆绑调整常用作SFM的最后一步。由于因式分解法和代数法通常存在误差,因此可以将因式分解法和代数法算出的值作为初始解,利用最优化的方法来得到最优解。