一、针对工业领域线圈小目标检测,基于Yolov5s网络改进检测头实验及其检测效果对比
背景:
基于7分类实验(异物、点胶不良、剥锡不良、打点不良、线圈外变形,线圈表面交错、氧化
修改后的网络结构图
保留原Yolov5s的检测头结构,扩增一层160×160size的feature map,大尺度特征图负责检测小目标,并且由于原始训练集中样本特征多样性以及样本类别中独立同分布特征出现频率不同,再次直接利用低层高维特征分布空间保留的信息与深层低维特征空间的信息进行concat,细节(如图:第4层、第17层、第20层与第3层在通道维度上进行拼接后进行上采样操作使其特征图尺寸等于第4、17层,满足以上条件后,将三个特征空间在通道维度进行concat)扩增的feature map如下图红线所视:
 模型结构配置文件:yolov5.yaml文件
模型结构配置文件:yolov5.yaml文件
# YOLOv5 by Ultralytics, GPL-3.0 license
# Parameters
nc: 7 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
- [24, 22, 36, 30, 19, 70] # P3/8
# anchors:
# - [24, 22, 36, 30, 19, 70] # P3/8
# - [67, 21, 34, 52, 56, 39] # P4/16
# - [103, 38,51, 80, 91, 84] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium) 80
[-1, 1, Conv, [512, 3, 2]], #
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[-1, 1, Conv, [512, 1, 1]], # 24 减少了c
[-1, 1, nn.Upsample, [None, 2, 'nearest']], # /16
[[-1, 6, 20], 1, Concat, [1]], # 26 c= 1/3
[-1, 3, C3, [512, False]], # 27
[-1, 1, nn.Upsample, [None, 2, 'nearest']], # / 8
[[-1, 4, 17], 1, Concat, [1]], # 29
[-1, 3, C3, [512, False]], # 30 加深了c
[[17, 20, 23, 30], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
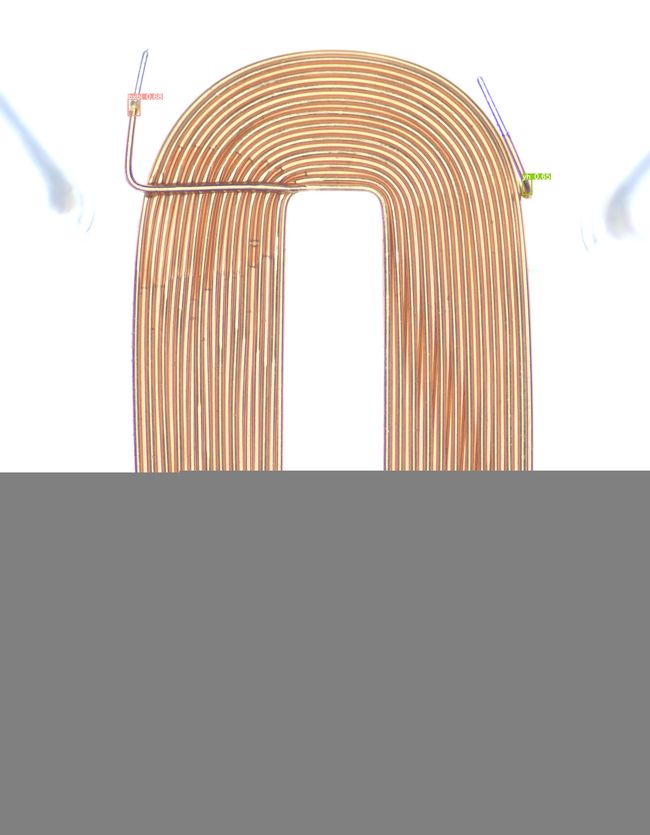
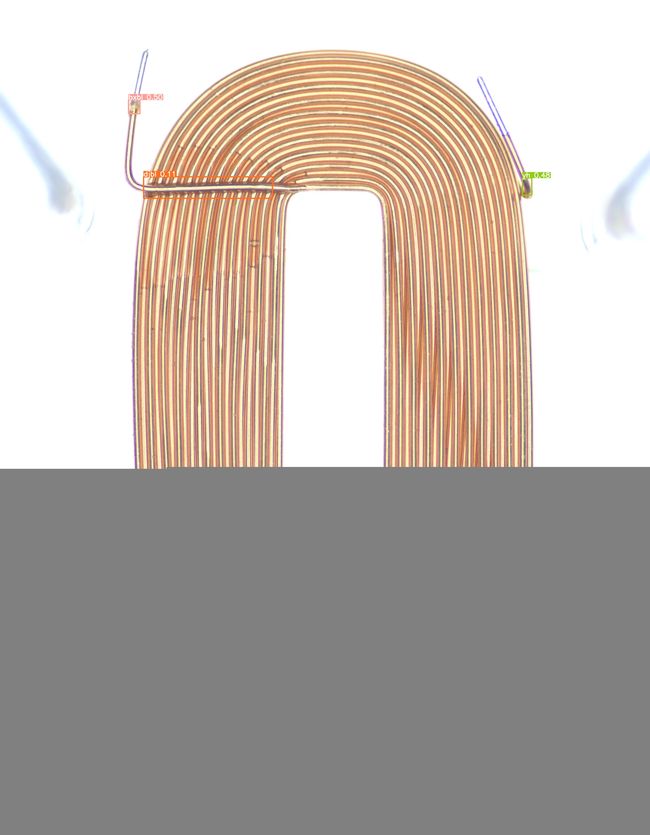
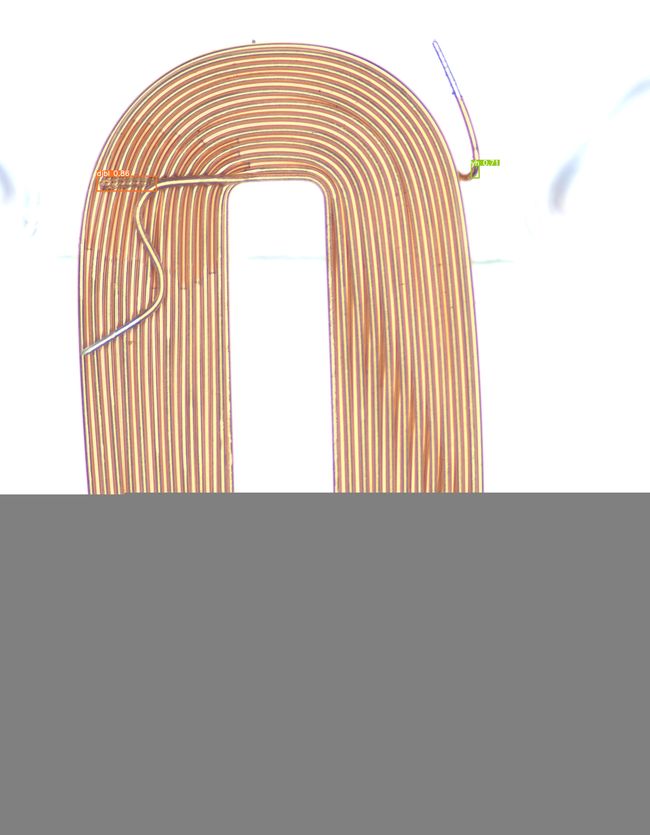
实验检测效果图部分对比(yolov5s与修改后的yolov5)