第 6 章 机器人仿真系统 2 —— URDF 语法详解 urdf01_rviz(重要)
文章目录
- 0 简单介绍
- 1 URDF 语法详解_robot
-
- 1.1 属性
- 1.2 子标签
- 2 URDF 语法详解_link
-
- 2.1 属性
- 2.2 子标签
- 2.3 案例
-
- 2.3.1 URDF文件 —— demo02_link.urdf
- 2.3.2 launch文件 —— demo02_link.launch
- 2.3.3 编译运行
- 3 URDF语法详解_joint
-
- 3.1 属性
- 3.2 子标签
- 3.3 案例
-
- 3.3.1 URDF文件 —— demo03_joint.urdf
- 3.3.2 launch文件 —— demo03_joint.launch
- 3.3.3 图形显示问题解决(launch文件添加两个包)
- 3.3.4 编译运行
- 3.3.5 优化 URDF
-
- 3.3.5.1 URDF文件 —— demo04_base_footprint.urdf(重要)
- 3.3.5.2 launch文件 —— demo04_base_footprint.launch
- 3.3.5.2 编译运行
- 3.3.6 常见问题
- 4 URDF 练习
-
- 4.0 需求 - 实现流程
- 4.1 launch文件 —— demo05_test.launch
- 4.2 URDF 文件 —— demo05_test.urdf
-
- 4.2.1 添加极小球体 base_footprint
- 4.2.2 添加底盘 base_link 和 关节 link2footprint
- 4.2.3 添加驱动轮 left/right_wheel 和 关节 left/right_joint
- 4.2.4 添加万动轮 front/back_wheel 和 关节
- 4.2.5 URDF 总程序 —— demo05_test.urdf
- 5 URDF工具
-
- 5.1 check_urdf 语法检查
- 5.2 urdf_to_graphiz 结构查看
0 简单介绍
URDF 文件是一个标准的 XML 文件,在 ROS 中预定义了一系列的标签用于描述机器人模型,机器人模型可能较为复杂,但是 ROS 的 URDF 中机器人的组成却是较为简单,可以主要简化为两部分:连杆 (link标签) 与 关节 (joint标签),接下来我们就通过案例了解一下 URDF 中的不同标签:
- robot 根标签,类似于 launch文件中的launch标签
- link 连杆标签
- joint 关节标签
- gazebo 集成gazebo需要使用的标签
关于gazebo标签,后期在使用 gazebo 仿真时,才需要使用到,用于配置仿真环境所需参数,比如: 机器人材料属性、gazebo插件等,但是该标签不是机器人模型必须的,只有在仿真时才需设置。
1 URDF 语法详解_robot
robot
- urdf 中为了保证 xml 语法的完整性,使用了 robot 标签作为根标签,所有的 link 和 joint 以及其他标签都必须包含在 robot 标签内,在该标签内可以通过 name 属性设置机器人模型的名称。
1.1 属性
name: 指定机器人模型的名称
1.2 子标签
其他标签都是子级标签
2 URDF 语法详解_link
- 定义:urdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性,比如:机器人底座、轮子、激光雷达、摄像头…每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性。
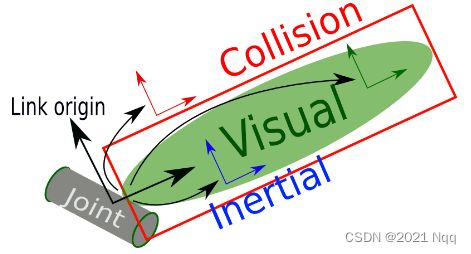
- Inertial:惯性矩阵,机器人起步和刹车时发生后仰或者前移(由于惯性导致),甚至翻车。设置重心、质量,不同维度的惯性参数。
- Collision:碰撞参数,表示将物体包裹在一定的区域内(红色),如果障碍物进入某个区域,就说明发生碰撞。
- Visual:可视化
2.1 属性
- name —> 为连杆命名
2.2 子标签

2.3 案例
- 需求:分别生成长方体、圆柱与球体的机器人部件
2.3.1 URDF文件 —— demo02_link.urdf
- 将 sim_demo 里面的两个文件 导入到 urdf01_rviz 里面的 config 文件夹中
<robot name = "mycar">
<link name = "base_link">
<visual>
<geometry>
<mesh filename = "package://urdf01_rviz/meshes/autolabor_mini.stl"/>
geometry>
<origin xyz = "0 0 0" rpy = "1.57 0 1.57" />
<material name = "car_color">
<color rgba = "0 1 0 1" />
material>
visual>
link>
robot>
2.3.2 launch文件 —— demo02_link.launch
<launch>
<param name = "robot_description" textfile = "$(find urdf01_rviz)/urdf/urdf/demo02_link.urdf" />
<node pkg = "rviz" type = "rviz" name = "rviz" args = "-d $(find urdf01_rviz)/config/show_mycar.rviz"/>
launch>
2.3.3 编译运行
cd demo03_ws/
source ./devel/setup.bash
roslaunch urdf01_rviz demo02_link.launch
- rpy = “0 0 0”

- rpy = “1.57 0 1.57” 弧度制
3 URDF语法详解_joint
- 定义:urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 parent link 与 child link)以"关节"的形式相连接,不同的关节有不同的运动形式:旋转、滑动、固定、旋转速度、旋转角度限制…,比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上。

- axis 可以指定旋转方向
3.1 属性

3.2 子标签

- origin 就是 上图的紫色部分,joint 关于 parent_link 的位置关系
3.3 案例
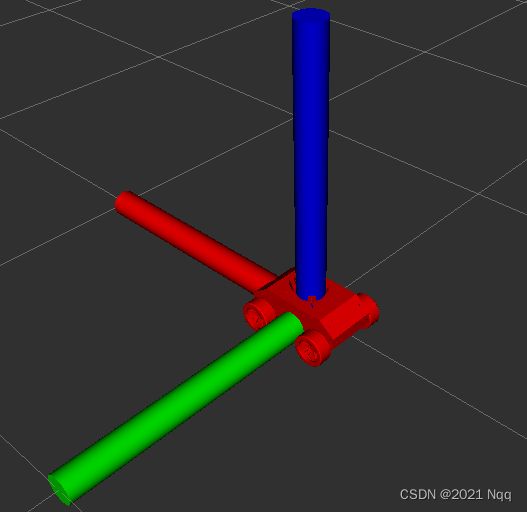
- 需求:创建机器人模型,底盘为长方体,在长方体的前面添加一摄像头,摄像头可以沿着 Z 轴 360 度旋转。
3.3.1 URDF文件 —— demo03_joint.urdf

- 底盘(下面的矩形):x 长 0.3,y 宽 0.2,z 高 0.1
- 关节偏移量(相对于原点位置):x方向 0.12 ,y方向 0,z方向 0.05
- 摄像头:x 0,y 0,z 0.025, z方向上移摄像头一半的高度,否则会半沉
- urdf文件里使用中文注释可能会报错,使用 melodic版本的话,需要去掉 urdf 文件里面的中文注释。
<robot name = "mycar">
<link name = "base_link">
<visual>
<geometry>
<box size = "0.3 0.2 0.1" />
geometry>
<origin xyz = "0 0 0" rpy = "0 0 0" />
<material name = "car_color">
<color rgba = "0.8 0.5 0 0.5" />
material>
visual>
link>
<link name = "camera">
<visual>
<geometry>
<box size = "0.02 0.05 0.05" />
geometry>
<origin xyz = "0 0 0.025" rpy = "0 0 0" />
<material name = "camera_color">
<color rgba = "0 0 1 0.5" />
material>
visual>
link>
<joint name = "camera2base" type = "continuous">
<parent link = "base_link" />
<child link = "camera" />
<origin xyz = "0.12 0 0.05" rpy = "0 0 0" />
<axis xyz = "0 0 1" />
joint>
robot>
3.3.2 launch文件 —— demo03_joint.launch
<launch>
<param name = "robot_description" textfile = "$(find urdf01_rviz)/urdf/urdf/demo03_joint.urdf" />
<node pkg = "rviz" type = "rviz" name = "rviz" args = "-d $(find urdf01_rviz)/config/show_mycar.rviz"/>
<node pkg = "joint_state_publisher" type = "joint_state_publisher" name = "joint_state_publisher" />
<node pkg = "robot_state_publisher" type = "robot_state_publisher" name = "robot_state_publisher" />
<node pkg = "joint_state_publisher_gui" type = "joint_state_publisher_gui" name = "joint_state_publisher_gui"/>
launch>
- 下载关节控制结点的包
sudo apt-get install ros-melodic-joint-state-publisher-gui
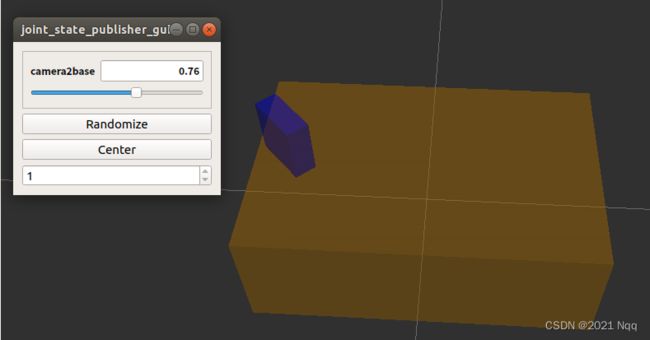
- 如果界面出现抖动,可以注释 joint_state_publisher
- 蓝色进度条可以控制摄像头旋转
3.3.3 图形显示问题解决(launch文件添加两个包)
不加 关节状态节点 和 机器人状态节点 出现的问题
- 表现:设置头显示位置与颜色异常
- 提示:No transform from [camera] to [base_link] 缺少 camera 到 base_link 的坐标变换
- 原因:rviz 显示 URDF 时,必须发布不同部件之间的 坐标系 关系
- 解决:ROS中提供了关于机器人模型显示的坐标发布相关节点(两个)
- rosrun joint_state_publisher joint_state_publisher
- rosrun robot_state_publisher robot_state_publisher
3.3.4 编译运行
cd demo03_ws/
source ./devel/setup.bash
roslaunch urdf01_rviz demo03_joint.launch
3.3.5 优化 URDF
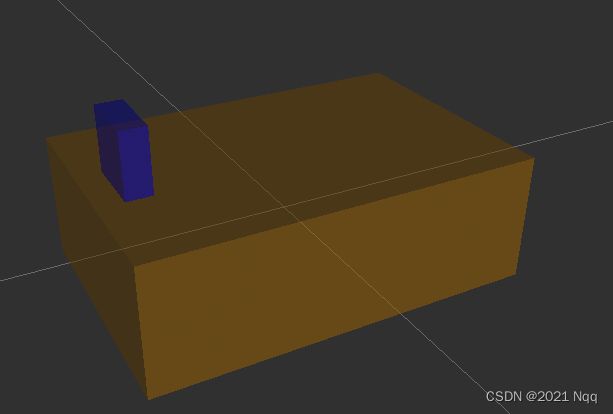
- 问题:机器人黄色方块是下沉在地下。
- 前面实现的机器人模型是半沉到地下的,因为默认情况下: 底盘的中心点位于地图原点上,所以会导致这种情况产生,可以使用的优化策略,将初始 link 设置为一个尺寸极小的 link(比如半径为 0.001m 的球体,或边长为 0.001m 的立方体),然后再在初始 link 上添加底盘等刚体,这样实现,虽然仍然存在初始link半沉的现象,但是基本可以忽略了。这个初始 link 一般称之为 base_footprint。
3.3.5.1 URDF文件 —— demo04_base_footprint.urdf(重要)
- 需要删除中文解释,才不会报错
<robot name = "mycar">
<link name = "base_footprint">
<visual>
<geometry>
<box size = "0.001 0.001 0.001" />
geometry>
visual>
link>
<link name = "base_link">
<visual>
<geometry>
<box size = "0.3 0.2 0.1" />
geometry>
<origin xyz = "0 0 0" rpy = "0 0 0" />
<material name = "car_color">
<color rgba = "0.8 0.5 0 0.5" />
material>
visual>
link>
<link name = "camera">
<visual>
<geometry>
<box size = "0.02 0.05 0.05" />
geometry>
<origin xyz = "0 0 0.025" rpy = "0 0 0" />
<material name = "camera_color">
<color rgba = "0 0 1 0.5" />
material>
visual>
link>
<joint name = "link2footprint" type = "fixed">
<parent link = "base_footprint" />
<child link = "base_link" />
<origin xyz = "0 0 0.05" rpy = "0 0 0" />
joint>
<joint name = "camera2base" type = "continuous">
<parent link = "base_link" />
<child link = "camera" />
<origin xyz = "0.12 0 0.05" rpy = "0 0 0" />
<axis xyz = "0 0 1" />
joint>
robot>
3.3.5.2 launch文件 —— demo04_base_footprint.launch
<launch>
<param name = "robot_description" textfile = "$(find urdf01_rviz)/urdf/urdf/demo04_base_footprint.urdf" />
<node pkg = "rviz" type = "rviz" name = "rviz" args = "-d $(find urdf01_rviz)/config/show_mycar.rviz"/>
<node pkg = "joint_state_publisher" type = "joint_state_publisher" name = "joint_state_publisher" />
<node pkg = "robot_state_publisher" type = "robot_state_publisher" name = "robot_state_publisher" />
launch>
3.3.5.2 编译运行
cd demo03_ws/
source ./devel/setup.bash
roslaunch urdf01_rviz demo04_base_footprint.launch
- rviz 中 初始的参考系 Fixed Frame 修改为 base_footprint

3.3.6 常见问题
问题1:命令行输出如下错误提示
UnicodeEncodeError: 'ascii' codec can't encode characters in position 463-464: ordinal not in range(128)
[joint_state_publisher-3] process has died [pid 4443, exit code 1, cmd /opt/ros/melodic/lib/joint_state_publisher/joint_state_publisher __name:=joint_state_publisher __log:=/home/rosmelodic/.ros/log/b38967c0-0acb-11eb-aee3-0800278ee10c/joint_state_publisher-3.log].
log file: /home/rosmelodic/.ros/log/b38967c0-0acb-11eb-aee3-0800278ee10c/joint_state_publisher-3*.log
- rviz中提示坐标变换异常,导致机器人部件显示结构异常
- 原因:编码问题导致的
- 解决:去除URDF中的中文注释
问题2:[ERROR] [1584370263.037038]: Could not find the GUI, install the
‘joint_state_publisher_gui’ package - 解决:sudo apt install ros-noetic-joint-state-publisher-gui
4 URDF 练习
- link偏移量是物体中心和大地坐标系原点的偏移
- joint偏移量是两个link坐标系之间的偏移量
4.0 需求 - 实现流程
- 设计要求:创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm,高 8cm,四轮由两个驱动轮和两个万向支撑轮组成,两个驱动轮半径为 3.25cm,轮胎宽度1.5cm,两个万向轮为球状,半径 0.75cm,底盘离地间距为 1.5cm(与万向轮直径一致)
4.1 launch文件 —— demo05_test.launch
<launch>
<param name = "robot_description" textfile = "$(find urdf01_rviz)/urdf/urdf/demo05_test.urdf" />
<node pkg = "rviz" type = "rviz" name = "rviz" args = "-d $(find urdf01_rviz)/config/show_mycar.rviz"/>
<node pkg = "joint_state_publisher" type = "joint_state_publisher" name = "joint_state_publisher" />
<node pkg = "robot_state_publisher" type = "robot_state_publisher" name = "robot_state_publisher" />
<node pkg = "joint_state_publisher_gui" type = "joint_state_publisher_gui" name = "joint_state_publisher_gui" />
launch>
4.2 URDF 文件 —— demo05_test.urdf
4.2.1 添加极小球体 base_footprint
<link name = "base_footprint">
<visual>
<geometry>
<sphere radius = "0.001" />
geometry>
<material name = "car_color">
<color rgba = "1 0 0 0.5" /> 红色
material>
visual>
link>
4.2.2 添加底盘 base_link 和 关节 link2footprint
- 底盘为圆柱状,半径 10cm,高 8cm
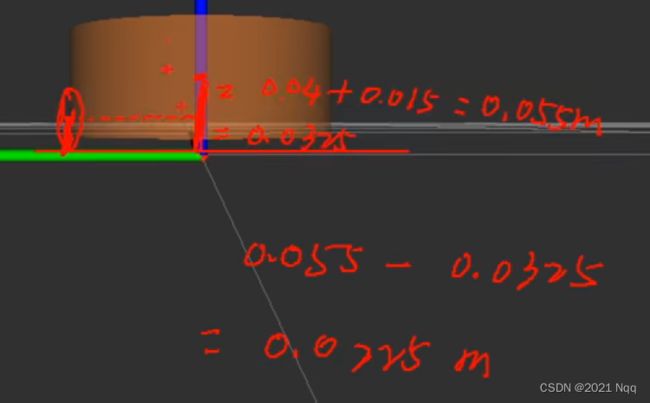
- 底盘离地间距为 1.5cm,这个主要由关节偏移量实现,关节连接 base_footprint和底盘的集合中心。关节z上的设置 = 车体高度/2 + 离地高度 = 0.04 + 0.015 = 0.055
<link name = "base_link">
<visual>
<geometry>
<cylinder radius = "0.1" length = "0.08" />
geometry>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<material name = "baselink_color">
<color rgba = "1 0.5 0.2 0.5" />
material>
visual>
link>
<joint name = "link2footprint" type = "fixed">
<parent link = "base_footprint" />
<child link = "base_link" />
<origin xyz = "0 0 0.055" rpy = "0 0 0" />
joint>
4.2.3 添加驱动轮 left/right_wheel 和 关节 left/right_joint
- 两个驱动轮半径为 3.25cm,轮胎宽度1.5cm
- 正常情况下圆柱面朝上,这里驱动轮在左右,需要修改欧拉角,沿x轴翻滚90度,约为1.57弧度。
- 关节 z 偏移值: 0.04 + 0.015 - 0.0325 = 0.055 - 0.0325 = 0.0225,在下面为负数
- 计算公式:z = 车体高度 / 2 + 离地间距 - 车轮半径
- 关节xyz取值的参考坐标是底盘 base_link,所以 z 偏移值为负, -0.0225
- 关节 y 偏移值:0.1 车体半径
- 驱动轮在调试中抖动,是因为开了两个joint_state_publisher,一个是静态,一个是动态,造成tf冲突。
<link name = "left_wheel">
<visual>
<geometry>
<cylinder radius = "0.0325" length = "0.015" />
geometry>
<origin xyz = "0 0 0" rpy = "1.5708 0 0"/>
<material name = "wheel_color">
<color rgba = "0 0 0 0.3" />
material>
visual>
link>
<link name = "right_wheel">
<visual>
<geometry>
<cylinder radius = "0.0325" length = "0.015" />
geometry>
<origin xyz = "0 0 0" rpy = "1.5708 0 0"/>
<material name = "wheel_color">
<color rgba = "0 0 0 0.3" />
material>
visual>
link>
<joint name = "lest2link" type = "continuous">
<parent link = "base_link" />
<child link = "left_wheel" />
<origin xyz = "0 0.1 -0.0225" rpy = "0 0 0" />
<axis xyz = "0 1 0" />
joint>
<joint name = "right2link" type = "continuous">
<parent link = "base_link" />
<child link = "right_wheel" />
<origin xyz = "0 -0.1 -0.0225" rpy = "0 0 0" />
<axis xyz = "0 1 0" />
joint>
4.2.4 添加万动轮 front/back_wheel 和 关节
- 两个万向轮为球状,半径 0.75cm,沿着 x 轴放置
- 关节z偏移值:0.04 + 0.015 - 0.0075 = 0.0475
- 关节x偏移值:0.08 小于底盘半径

<link name = "front_wheel">
<visual>
<geometry>
<sphere radius = "0.0075" />
geometry>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<material name = "wheel_color">
<color rbga = "0 0 0 0.3" />
material>
visual>
link>
<link name = "back_wheel">
<visual>
<geometry>
<sphere radius = "0.0075" />
geometry>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<material name = "wheel_color">
<color rbga = "0 0 0 0.3" />
material>
visual>
link>
<joint name = "front2link" type = "continuous">
<parent link = "base_link" />
<child link = "front_wheel" />
<origin xyz = "0.08 0 -0.0475" rpy = "0 0 0" />
<axis xyz = "0 1 0" />
joint>
<joint name = "back2link" type = "continuous">
<parent link = "base_link" />
<child link = "back_wheel" />
<origin xyz = "-0.08 0 -0.0475" rpy = "0 0 0" />
<axis xyz = "0 1 0" />
joint>
4.2.5 URDF 总程序 —— demo05_test.urdf
<robot name = "mycar">
<link name = "base_footprint">
<visual>
<geometry>
<sphere radius = "0.001" />
geometry>
<material name = "car_color">
<color rgba = "1 0 0 0.5" />
material>
visual>
link>
<link name = "base_link">
<visual>
<geometry>
<cylinder radius = "0.1" length = "0.08" />
geometry>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<material name = "baselink_color">
<color rgba = "1 0.5 0.2 0.5" />
material>
visual>
link>
<joint name = "link2footprint" type = "fixed">
<parent link = "base_footprint" />
<child link = "base_link" />
<origin xyz = "0 0 0.055" rpy = "0 0 0" />
joint>
<link name = "left_wheel">
<visual>
<geometry>
<cylinder radius = "0.0325" length = "0.015" />
geometry>
<origin xyz = "0 0 0" rpy = "1.5708 0 0"/>
<material name = "wheel_color">
<color rgba = "0 0 0 0.3" />
material>
visual>
link>
<link name = "right_wheel">
<visual>
<geometry>
<cylinder radius = "0.0325" length = "0.015" />
geometry>
<origin xyz = "0 0 0" rpy = "1.5708 0 0"/>
<material name = "wheel_color">
<color rgba = "0 0 0 0.3" />
material>
visual>
link>
<joint name = "lest2link" type = "continuous">
<parent link = "base_link" />
<child link = "left_wheel" />
<origin xyz = "0 0.1 -0.0225" rpy = "0 0 0" />
<axis xyz = "0 1 0" />
joint>
<joint name = "right2link" type = "continuous">
<parent link = "base_link" />
<child link = "right_wheel" />
<origin xyz = "0 -0.1 -0.0225" rpy = "0 0 0" />
<axis xyz = "0 1 0" />
joint>
<link name = "front_wheel">
<visual>
<geometry>
<sphere radius = "0.0075" />
geometry>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<material name = "wheel_color">
<color rbga = "0 0 0 0.3" />
material>
visual>
link>
<link name = "back_wheel">
<visual>
<geometry>
<sphere radius = "0.0075" />
geometry>
<origin xyz = "0 0 0" rpy = "0 0 0"/>
<material name = "wheel_color">
<color rbga = "0 0 0 0.3" />
material>
visual>
link>
<joint name = "front2link" type = "continuous">
<parent link = "base_link" />
<child link = "front_wheel" />
<origin xyz = "0.08 0 -0.0475" rpy = "0 0 0" />
<axis xyz = "0 1 0" />
joint>
<joint name = "back2link" type = "continuous">
<parent link = "base_link" />
<child link = "back_wheel" />
<origin xyz = "-0.08 0 -0.0475" rpy = "0 0 0" />
<axis xyz = "0 1 0" />
joint>
robot>
5 URDF工具
在 ROS 中,提供了一些工具来方便 URDF 文件的编写,比如:
- check_urdf命令可以检查复杂的 urdf 文件是否存在语法问题
- urdf_to_graphiz命令可以查看 urdf 模型结构,显示不同 link 的层级关系
当然,要使用工具之前,首先需要安装,安装命令:sudo apt install liburdfdom-tools
5.1 check_urdf 语法检查
进入urdf 文件所属目录,调用:check_urdf urdf 文件,如果不抛出异常,说明文件合法,否则非法。
- 右击 urdf 文件,在终端中打开
check_urdf demo05_test.urdf 显示层级关系

5.2 urdf_to_graphiz 结构查看
- 进入urdf 文件所属目录,调用:urdf_to_graphiz urdf文件,当前目录下会生成 pdf 文件
urdf_to_graphiz demo05_test.urdf
![]()
evince mycar.pdf

