目标检测
目标检测
一、目标检测概述
1.目标检测概述


2.目标检测算法介绍








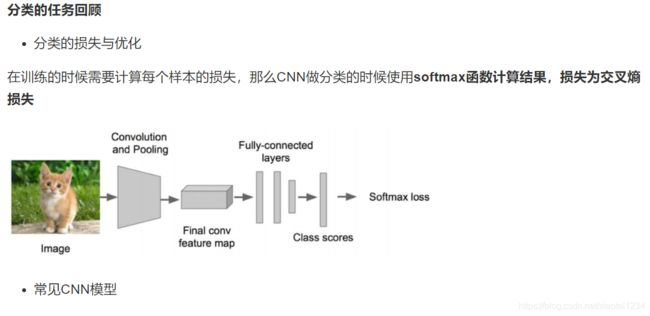
3.目标检测的任务



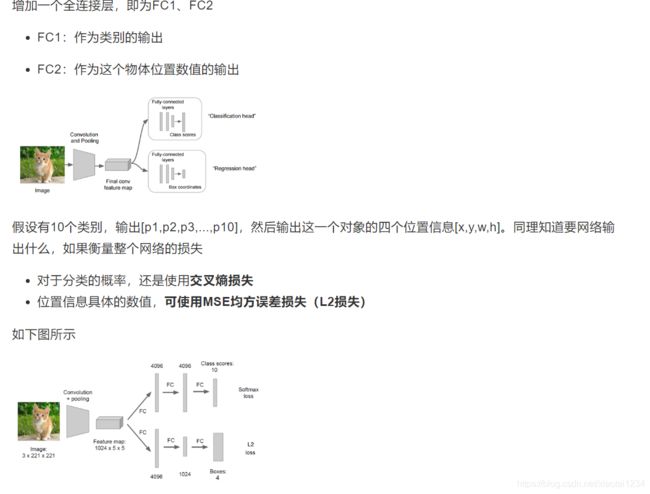
4.目标定位的简单实现思路
在分类的时候我们直接输出各个类别的概率,如果再加上定位的话,我们可以考虑在网络的最后输出加上位置信息。下面我们考虑图中只有一个物体的检测时候,我们可以有以下方法去进行训练我们的模型
回归位置
两种Bounding box名称



二、R-CNN

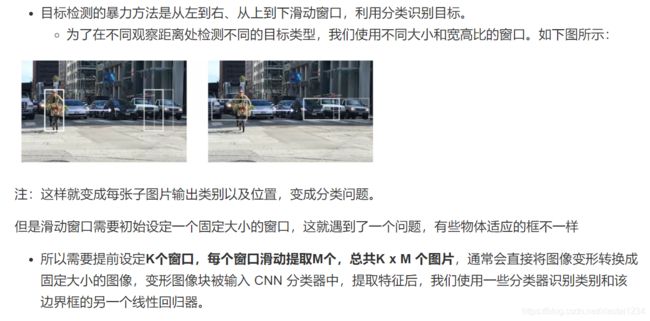
1.目标检测-Overfeat模型
滑动窗口

Overfeat模型总结

2.目标检测-R-CNN模型
在CVPR 2014年中Ross Girshick提出R-CNN。论文名称:用于精确的对象检测和语义分割的丰富功能层次结构(Rich feature hierarchies for accurate object detection and semantic segmentation)
论文背景

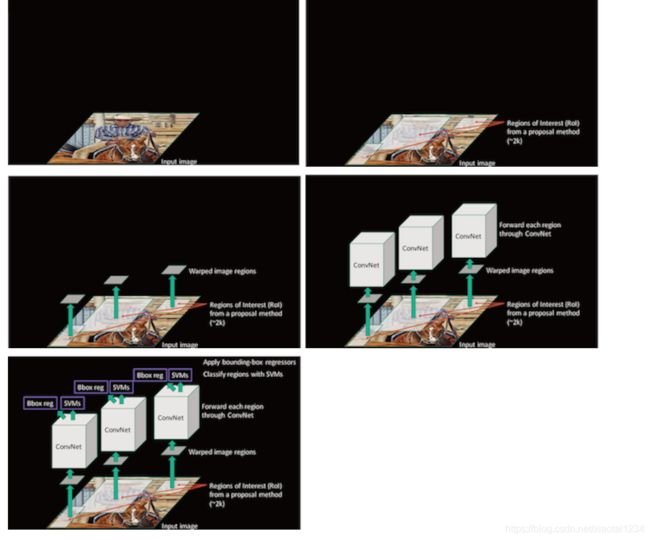
完整R-CNN结构


候选区域(Region of Interest)得出(了解)


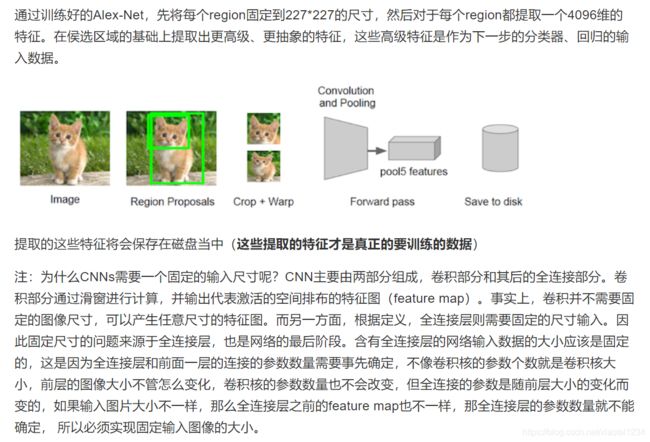
CNN特征提取
3.模型训练
CNN训练训练
分类器SVM训练


Boundingbox Regression


正负样本分配问题?

4.测试过程

非最大抑制(NMS)

import numpy as np
def nms(dets, thresh):
# dets: 检测的 boxes 及对应的 scores
# thresh: 设定的阈值
# boxes 位置
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
# boxes scores
scores = dets[:, 4]
areas = (x2 - x1 + 1) * (y2 - y1 + 1) # 各 box 的面积
order = scores.argsort()[::-1] # boxes 的按照 score 排序
keep = [] # 记录保留下的 boxes
while order.size > 0:
i = order[0] # score 最大的 box 对应的 index
keep.append(i) # 将本轮 score 最大的 box 的 index 保留
# 计算剩余 boxes 与当前 box 的重叠程度 IoU
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0.0, xx2 - xx1 + 1) # IoU
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (areas[i] + areas[order[1:]] - inter)
# 保留 IoU 小于设定阈值的 boxes
inds = np.where(ovr <= thresh)[0]
order = order[inds + 1]
return keep
5.检测的评价指标
IoU交并比

IOU 实现(重点)
def union(au, bu, area_intersection):
"""
计算并集
:param au:
:param bu:
:param area_intersection:
:return:
"""
# 计算a的面积
area_a = (au[2] - au[0]) * (au[3] - au[1])
# 计算b的面积
area_b = (bu[2] - bu[0]) * (bu[3] - bu[1])
# a和b的面积-交集面积=总共面积
area_union = area_a + area_b - area_intersection
return area_union
def intersection(ai, bi):
"""
计算交集
:param ai:a框坐标
:param bi:b框坐标
:return:
"""
# 1、取出交集的左上角点
x = max(ai[0], bi[0])
y = max(ai[1], bi[1])
# 2、取出交集的右下角点,并减去左上角点值,计算出交集长宽
w = min(ai[2], bi[2]) - x
h = min(ai[3], bi[3]) - y
# 3、如果一个为0,返回交集面积为0
if w < 0 or h < 0:
return 0
return w*h
def iou(a, b):
"""
计算交并比
:param a: a框坐标
:param b: b框坐标
:return:
"""
# 1、如果a,b 传入有问题
if a[0] >= a[2] or a[1] >= a[3] or b[0] >= b[2] or b[1] >= b[3]:
return 0.0
# 2、计算IOU
# 交集区域
area_i = intersection(a, b)
# 并集区域
area_u = union(a, b, area_i)
return float(area_i) / float(area_u + 1e-6) # 防止分母为0,加一个稳定系数

平均精确率(mean average precision)mAP




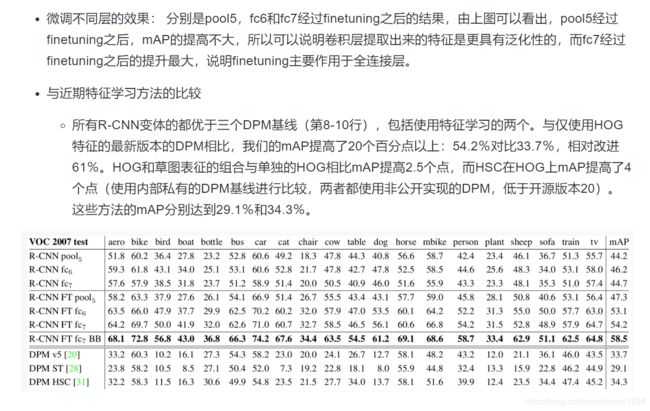
6.论文R-CNN总结
特征提取对比
网络架构

流程总结
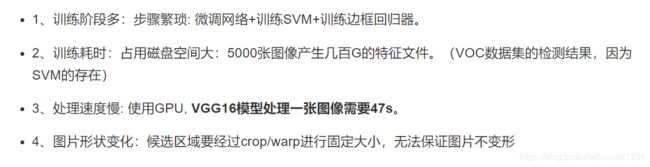
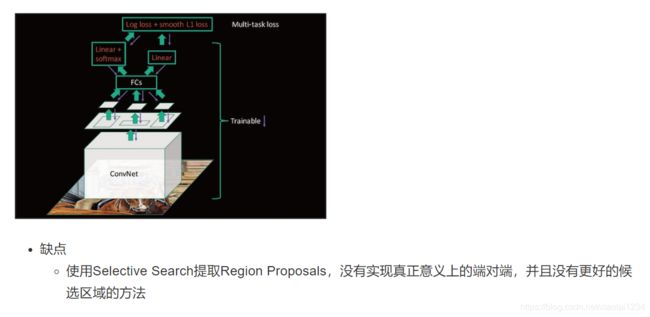
缺点
三、SPPNet
1.SPPNet介绍

SPPNet与RCNN对比


spatial pyramid pooling layer



映射


SPPNet 结果



代码实现
import tensorflow as tf
import math
def Spp_layer(feature_map, bins):
''' 使用 [3, 2, 1] denote 3*3, 2*2, 1*1 bins做金字塔赤化输出'''
# get feature map shape
batch_size, a, _, _ = feature_map.get_shape().as_list()
pooling_out_all = []
for layer in range(len(bins)):
# 计算每个不同池化尺寸的输出
k_size = math.ceil(a / bins[layer])
stride = math.floor(a / bins[layer])
pooling_out = tf.nn.max_pool(feature_map,
ksize=[1, k_size, k_size, 1],
strides=[1, stride, stride, 1],
padding='VALID')
pooling_out_resized = tf.reshape(pooling_out, [batch_size, -1])
pooling_out_all[layer] = pooling_out_resized
# 特征图合并输出结果
feature_map_out = tf.concat(axis=1, values=pooling_out_all)
return feature_map_out
2.SPPNet总结

四、Fast R-CNN

1.Fast R-CNN

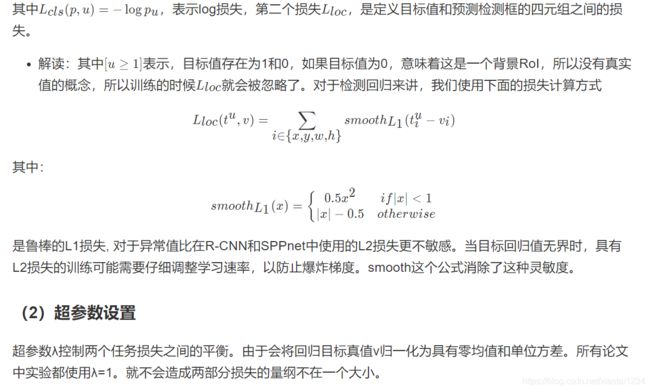
Fast R-CNN原理

RoI pooling


从预训练网络中进行训练





Fast RCNN检测
网络将图像(或图像金字塔,编码为图像列表)和待计算概率的R个候选框的列表作为输入。在测试的时候,R通常在2000左右。使用R-CNN算法的设置和对每个类别独立执行非最大抑制
2.Fast RCNN 效果






3.Fast R-CNN算法
五、Faster R-CNN
在Fast R-CNN还存在着瓶颈问题:Selective Search(选择性搜索)。要找出所有的候选框,那我们有没有一个更加高效的方法来求出这些候选框呢?
1.Faster R-CNN介绍

RPN网络
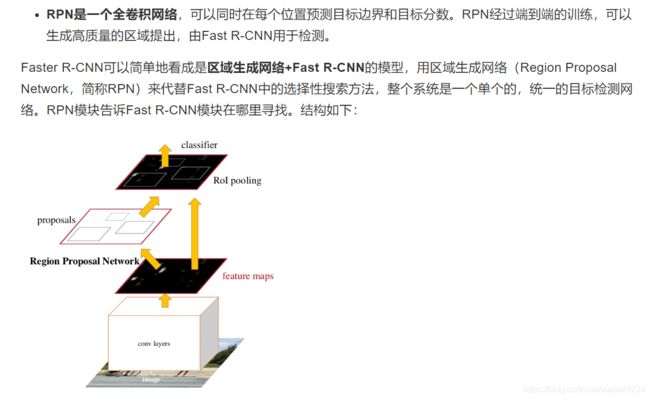

RPN原理


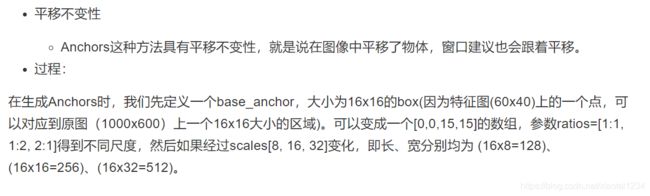
平移不变的anchor

2.Faster RCNN训练

RPN训练:





3.Faster R-CNN效果




4.Faster R-CNN总结

六、Faster RCNN接口介绍
1.COCO 数据集介绍
COCO数据集




下载

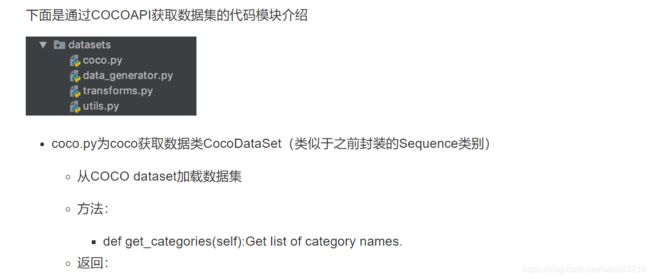
2.COCO API

格式

{
"info": #第一个info信息
{ #数据集信息
"description": "COCO 2014 Dataset",
"url": "http://cocodataset.org",
"version": "1.0",
"year": 2014,
"contributor": "COCO Consortium",
"date_created": "2017/09/01"
},
"images": #第二个图片信息,数组包含了多张图像
[ { #每张图像的具体信息
"license": 5,
"file_name": "COCO_train2014_000000057870.jpg",
"coco_url": "http://images.cocodataset.org/train2014/COCO_train2014_000000057870.jpg",
"height": 480,
"width": 640,
"date_captured": "2013-11-14 16:28:13",
"flickr_url": "http://farm4.staticflickr.com/3153/2970773875_164f0c0b83_z.jpg",
"id": 57870
},
......
...... #此处省略很多图片
{
"license": 4,
"file_name": "COCO_train2014_000000475546.jpg",
"http://images.cocodataset.org/train2014/COCO_train2014_000000475546.jpg",
"height": 375,
"width":500,;、
"date_captured": "2013-11-25 21:20:23",
"flickr_url": "http://farm1.staticflickr.com/167/423175046_6cd9d0205a_z.jpg",
"id": 475546
}], #图像描述结束,下面开始介绍licenses
"licenses":
[ {
"url": "http://creativecommons.org/licenses/by-nc-sa/2.0/",
"id": 1,
"name": "Attribution-NonCommercial-ShareAlike License"
},
.....#此处省略七个license
.....
{
"url": "http://creativecommons.org/licenses/by-nc-nd/2.0/",
"id": 8,
"name": "Attribution-NonCommercial-NoDerivs License"
}],
"annotations":
[ {
"segmentation":[[312.29,562.89,402.25,511.49,400.96,425.38,398.39,372.69,
388.11,332.85,318.71,325.14,295.58,305.86,269.88,314.86,
258.31,337.99,217.19,321.29,182.49,343.13,141.37,348.27,
132.37,358.55,159.36,377.83,116.95,421.53,167.07,499.92,
232.61,560.32,300.72,571.89]],
"area": 54652.9556,
"iscrowd": 0,
"image_id": 480023,
"bbox": [116.95,305.86,285.3,266.03],
"category_id": 58,"id": 86
},
.....#此处省略很多图像的分割标签
.....
"segmentation":[[312.29,562.89,402.25,511.49,400.96,425.38,398.39,372.69,
388.11,332.85,318.71,325.14,295.58,305.86,269.88,314.86,
258.31,337.99,217.19,321.29,182.49,343.13,141.37,348.27,
132.37,358.55,159.36,377.83,116.95,421.53,167.07,499.92,
232.61,560.32,300.72,571.89]],
"area": 54652.9556,
"iscrowd": 0,
"image_id": 480023,
"bbox": [116.95,305.86,285.3,266.03],
"category_id": 58,
"id": 86
},
"categories":#类别信息
[ {
"supercategory": "person",
"id": 1,
"name": "person"
},
.......#此处省略很多图像的类标签
.......
{
"supercategory": "vehicle",
"id": 2,
"name": "bicycle"
},
{
"supercategory": "kitchen",#大类
"id": 50,
"name": "spoon"
}
利用 json 文件实例化 COCO API 对象

COCO接口获取数据代码

获取API
class CocoDataSet(object):
def __init__(self,
dataset_dir, # dataset_dir: The root directory of the COCO dataset.
subset, # subset: What to load (train, val).
flip_ratio=0, # flip_ratio: Float. The ratio of flipping an image and its bounding boxes.
pad_mode='fixed', # pad_mode: Which padded method to use (fixed, non-fixed)
mean=(0, 0, 0), # mean: Tuple. Image mean.
std=(1, 1, 1), # Tuple. Image standard deviation.
scale=(1024, 800), # Tuple of two integers.
debug=False):
获取2017数据集代码案例

import os
import tensorflow as tf
from tensorflow import keras
import numpy as np
from detection.datasets import coco, data_generator
import os
os.environ["TF_CPP_MIN_LOG_LEVEL"] = "2"
train_dataset = coco.CocoDataSet('./data/coco2017', 'train',
flip_ratio=0.5,
pad_mode='fixed',
mean=(123.675, 116.28, 103.53),
std=(1., 1., 1.),
scale=(800, 1216))
train_generator = data_generator.DataGenerator(train_dataset)
train_tf_dataset = tf.data.Dataset.from_generator(
train_generator, (tf.float32, tf.float32, tf.float32, tf.int32))
train_tf_dataset = train_tf_dataset.batch(1).prefetch(100).shuffle(100)
for (batch, inputs) in enumerate(train_tf_dataset):
batch_imgs, batch_metas, batch_bboxes, batch_labels = inputs
print(batch_imgs, batch_metas, batch_bboxes, batch_labels)
打印结果当中包含图片数据,批次元信息,GT位置信息,目标标签
3.Faster RCNN 训练以及预测
Faster RCNN流程图详解

开源keras Faster RCNN 模型代码结构

FaterRCNN 模型训练使用
from detection.models.detectors import faster_rcnn
# 2、建立模型
num_classes = len(train_dataset.get_categories())
model = faster_rcnn.FasterRCNN(num_classes=num_classes)
optimizer = keras.optimizers.SGD(1e-3, momentum=0.9, nesterov=True)
# 3、迭代训练
for epoch in range(1):
loss_history = []
for (batch, inputs) in enumerate(train_tf_dataset):
batch_imgs, batch_metas, batch_bboxes, batch_labels = inputs
with tf.GradientTape() as tape:
rpn_class_loss, rpn_bbox_loss, rcnn_class_loss, rcnn_bbox_loss = model(
(batch_imgs, batch_metas, batch_bboxes, batch_labels), training=True)
loss_value = rpn_class_loss + rpn_bbox_loss + rcnn_class_loss + rcnn_bbox_loss
grads = tape.gradient(loss_value, model.trainable_variables)
optimizer.apply_gradients(zip(grads, model.trainable_variables))
loss_history.append(loss_value.numpy())
if batch % 10 == 0:
print('迭代次数: %d, 批次数: %d, 损失: %f' % (epoch+1, batch+1, np.mean(loss_history)))

4.代码核心解析
模型主体过程
def call(self, inputs, training=True):
"""
:param inputs: [1, 1216, 1216, 3], [1, 11], [1, 14, 4], [1, 14]
:param training:
:return:
"""
if training: # training
imgs, img_metas, gt_boxes, gt_class_ids = inputs
else: # inference
imgs, img_metas = inputs
# 1、主干网络计算,ResNet五层特征输出保留
# [1, 304, 304, 256] => [1, 152, 152, 512]=>[1,76,76,1024]=>[1,38,38,2048]
C2, C3, C4, C5 = self.backbone(imgs,
training=training)
# [1, 304, 304, 256] <= [1, 152, 152, 256]<=[1,76,76,256]<=[1,38,38,256]=>[1,19,19,256]
# FPN进行处理金字塔特征
P2, P3, P4, P5, P6 = self.neck([C2, C3, C4, C5],
training=training)
# 用于RPN计算
rpn_feature_maps = [P2, P3, P4, P5, P6]
# 用于后面的RCNN计算
rcnn_feature_maps = [P2, P3, P4, P5]
# [1, 369303, 2] [1, 369303, 2], [1, 369303, 4], includes all anchors on pyramid level of features
# 2、RPN计算输出2000候选框
# 得到输出结果
rpn_class_logits, rpn_probs, rpn_deltas = self.rpn_head(
rpn_feature_maps, training=training)
# [369303, 4] => [215169, 4], valid => [6000, 4], performance =>[2000, 4], NMS
# 过滤
proposals_list = self.rpn_head.get_proposals(
rpn_probs, rpn_deltas, img_metas)
# 进行区域分配GT,标记正负样本
if training: # get target value for these proposal target label and target delta
rois_list, rcnn_target_matchs_list, rcnn_target_deltas_list = \
self.bbox_target.build_targets(
proposals_list, gt_boxes, gt_class_ids, img_metas)
else:
rois_list = proposals_list
# rois_list only contains coordinates, rcnn_feature_maps save the 5 features data=>[192,7,7,256]
# 对多层特征进行ROIpooling操作
# Implements ROI Pooling on multiple levels of the feature pyramid.
pooled_regions_list = self.roi_align(#
(rois_list, rcnn_feature_maps, img_metas), training=training)
# [192, 81], [192, 81], [192, 81, 4]
# RCNN部分计算输出
rcnn_class_logits_list, rcnn_probs_list, rcnn_deltas_list = \
self.bbox_head(pooled_regions_list, training=training)
# 3、RPN损失以及输出RCNN的损失计算
if training:
rpn_class_loss, rpn_bbox_loss = self.rpn_head.loss(
rpn_class_logits, rpn_deltas, gt_boxes, gt_class_ids, img_metas)
rcnn_class_loss, rcnn_bbox_loss = self.bbox_head.loss(
rcnn_class_logits_list, rcnn_deltas_list,
rcnn_target_matchs_list, rcnn_target_deltas_list)
return [rpn_class_loss, rpn_bbox_loss,
rcnn_class_loss, rcnn_bbox_loss]
else:
detections_list = self.bbox_head.get_bboxes(
rcnn_probs_list, rcnn_deltas_list, rois_list, img_metas)
return detections_list
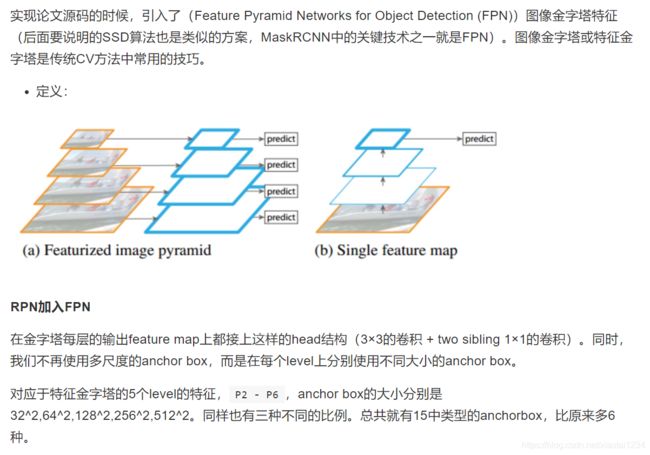
FPN(了解)
RPN

def call(self, inputs, training=True):
'''
Args
---
inputs: [batch_size, feat_map_height, feat_map_width, channels]
one level of pyramid feat-maps.
Returns
---
rpn_class_logits: [batch_size, num_anchors, 2]
rpn_probs: [batch_size, num_anchors, 2]
rpn_deltas: [batch_size, num_anchors, 4]
'''
layer_outputs = []
for feat in inputs: # for every anchors feature maps
"""
(1, 304, 304, 256)
(1, 152, 152, 256)
(1, 76, 76, 256)
(1, 38, 38, 256)
(1, 19, 19, 256)
rpn_class_raw: (1, 304, 304, 6)
rpn_class_logits: (1, 277248, 2)
rpn_delta_pred: (1, 304, 304, 12)
rpn_deltas: (1, 277248, 4)
rpn_class_raw: (1, 152, 152, 6)
rpn_class_logits: (1, 69312, 2)
rpn_delta_pred: (1, 152, 152, 12)
rpn_deltas: (1, 69312, 4)
rpn_class_raw: (1, 76, 76, 6)
rpn_class_logits: (1, 17328, 2)
rpn_delta_pred: (1, 76, 76, 12)
rpn_deltas: (1, 17328, 4)
rpn_class_raw: (1, 38, 38, 6)
rpn_class_logits: (1, 4332, 2)
rpn_delta_pred: (1, 38, 38, 12)
rpn_deltas: (1, 4332, 4)
rpn_class_raw: (1, 19, 19, 6)
rpn_class_logits: (1, 1083, 2)
rpn_delta_pred: (1, 19, 19, 12)
rpn_deltas: (1, 1083, 4)
"""
# print(feat.shape)
shared = self.rpn_conv_shared(feat)
shared = tf.nn.relu(shared)
x = self.rpn_class_raw(shared)
# print('rpn_class_raw:', x.shape)
rpn_class_logits = tf.reshape(x, [tf.shape(x)[0], -1, 2])
rpn_probs = tf.nn.softmax(rpn_class_logits)
# print('rpn_class_logits:', rpn_class_logits.shape)
x = self.rpn_delta_pred(shared)
# print('rpn_delta_pred:', x.shape)
rpn_deltas = tf.reshape(x, [tf.shape(x)[0], -1, 4])
# print('rpn_deltas:', rpn_deltas.shape)
layer_outputs.append([rpn_class_logits, rpn_probs, rpn_deltas])
# print(rpn_class_logits.shape, rpn_probs.shape, rpn_deltas.shape)
"""
(1, 277248, 2) (1, 277248, 2) (1, 277248, 4)
(1, 69312, 2) (1, 69312, 2) (1, 69312, 4)
(1, 17328, 2) (1, 17328, 2) (1, 17328, 4)
(1, 4332, 2) (1, 4332, 2) (1, 4332, 4)
(1, 1083, 2) (1, 1083, 2) (1, 1083, 4)
"""
outputs = list(zip(*layer_outputs))
outputs = [tf.concat(list(o), axis=1) for o in outputs]
rpn_class_logits, rpn_probs, rpn_deltas = outputs
# (1, 369303, 2) (1, 369303, 2) (1, 369303, 4)
# print(rpn_class_logits.shape, rpn_probs.shape, rpn_deltas.shape)
return rpn_class_logits, rpn_probs, rpn_deltas
根据输出进行筛选proposals:过滤分数、进行NMS等操作
def get_proposals(self,
rpn_probs,
rpn_deltas,
img_metas,
with_probs=False):
'''
Calculate proposals.
Args
---
rpn_probs: [batch_size, num_anchors, (bg prob, fg prob)]
rpn_deltas: [batch_size, num_anchors, (dy, dx, log(dh), log(dw))]
img_metas: [batch_size, 11]
with_probs: bool.
Returns
---
proposals_list: list of [num_proposals, (y1, x1, y2, x2)] in
normalized coordinates if with_probs is False.
Otherwise, the shape of proposals in proposals_list is
[num_proposals, (y1, x1, y2, x2, score)]
Note that num_proposals is no more than proposal_count. And different
images in one batch may have different num_proposals.
'''
anchors, valid_flags = self.generator.generate_pyramid_anchors(img_metas)
# [369303, 4], [b, 11]
# [b, N, (background prob, foreground prob)], get anchor's foreground prob, [1, 369303]
rpn_probs = rpn_probs[:, :, 1]
# [[1216, 1216]]
pad_shapes = calc_pad_shapes(img_metas)
proposals_list = [
self._get_proposals_single(
rpn_probs[i], rpn_deltas[i], anchors, valid_flags[i], pad_shapes[i], with_probs)
for i in range(img_metas.shape[0])
]
return proposals_list
计算RPN的损失,分类和回归损失:
def loss(self, rpn_class_logits, rpn_deltas, gt_boxes, gt_class_ids, img_metas):
"""
:param rpn_class_logits: [N, 2]
:param rpn_deltas: [N, 4]
:param gt_boxes: [GT_N]
:param gt_class_ids: [GT_N]
:param img_metas: [11]
:return:
"""
# valid_flags indicates anchors located in padded area or not.
anchors, valid_flags = self.generator.generate_pyramid_anchors(img_metas)
# 进行anhor匹配
rpn_target_matchs, rpn_target_deltas = self.anchor_target.build_targets(
anchors, valid_flags, gt_boxes, gt_class_ids)
rpn_class_loss = self.rpn_class_loss(
rpn_target_matchs, rpn_class_logits)
rpn_bbox_loss = self.rpn_bbox_loss(
rpn_target_deltas, rpn_target_matchs, rpn_deltas)
return rpn_class_loss, rpn_bbox_loss
测试输出
读取验证集合一张图片,输入模型进行预测输出
def test():
train_dataset = coco.CocoDataSet('./data/coco2017', 'val')
# 获取数据和模型
train_generator = data_generator.DataGenerator(train_dataset)
tf_dataset = tf.data.Dataset.from_generator(train_generator,
(tf.float32, tf.float32, tf.float32, tf.float32))
tf_dataset = tf_dataset.batch(1).prefetch(100).shuffle(100)
num_classes = len(train_dataset.get_categories())
model = faster_rcnn.FasterRCNN(num_classes=num_classes)
for (batch, inputs) in enumerate(tf_dataset):
img, img_meta, _, _ = inputs
print(img, img_meta)
detections_list = model((img, img_meta), training=False)
print(detections_list)
if __name__ == '__main__':
# train()
test()
输出结果
[<tf.Tensor: id=10027, shape=(20, 6), dtype=float32, numpy=
array([[0.000e+00, 0.000e+00, 0.000e+00, 0.000e+00, 3.300e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 7.000e+00, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 7.000e+00, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 7.000e+00, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 7.000e+00, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 7.000e+00, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 7.000e+00, 1.000e+00],
[0.000e+00, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 7.000e+00, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 7.000e+00, 1.000e+00],
[1.024e+03, 1.024e+03, 1.024e+03, 1.024e+03, 2.700e+01, 1.000e+00]],
dtype=float32)>]
七、YOLO算法

1.YOLO介绍

YOLO结构


统一检测过程理解


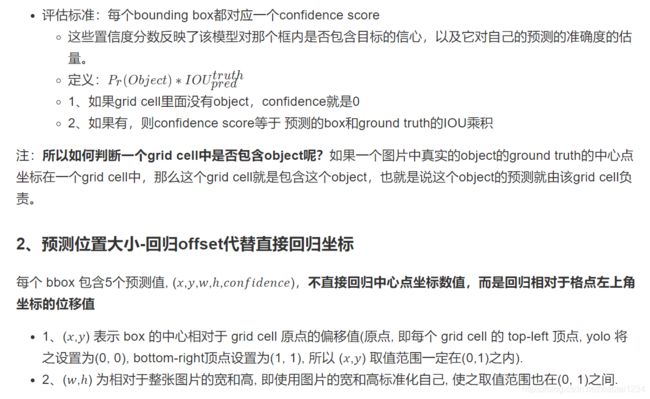
单元格(grid cell)

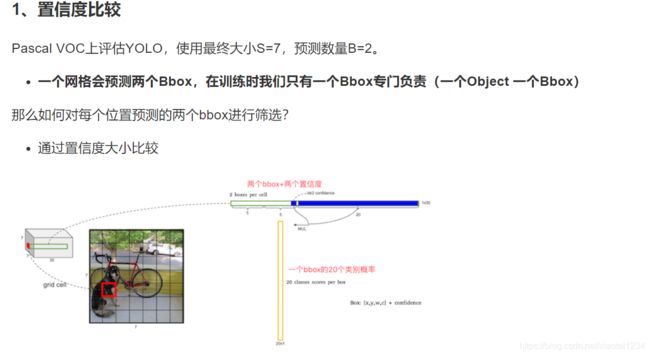
网格输出筛选
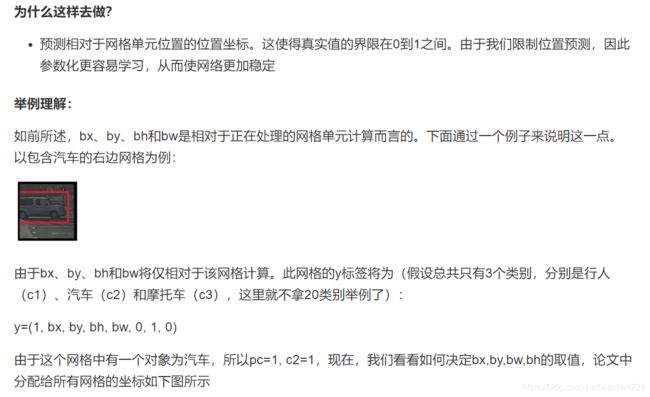




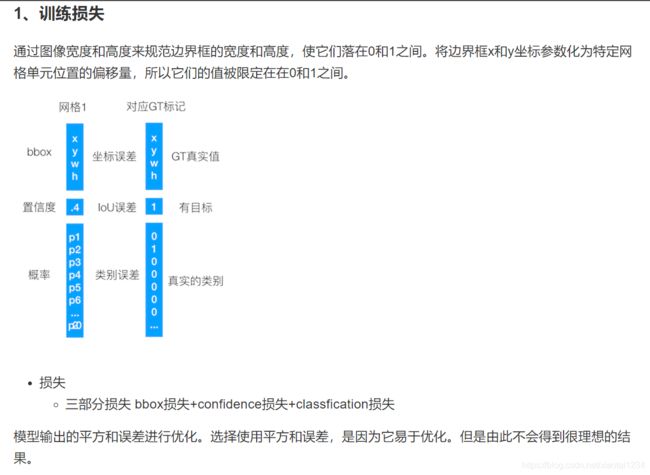
训练




2.与Faster R-CNN比较


3.YOLO总结

八、YOLOV2&V3
1.YOLOV2介绍
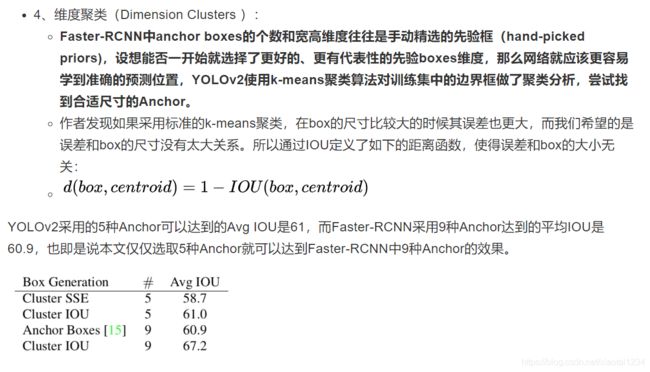
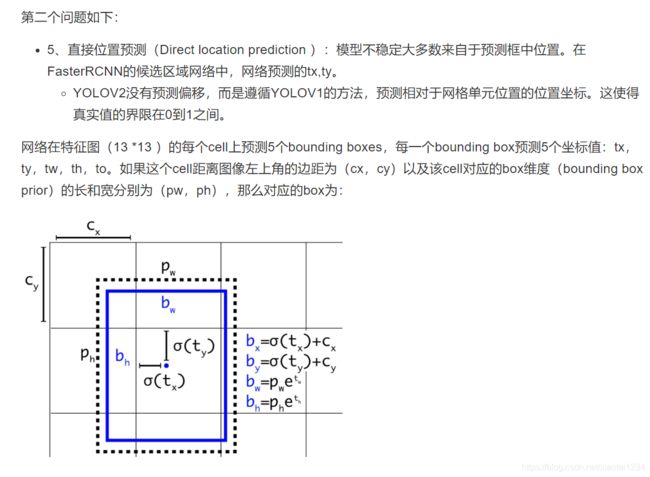
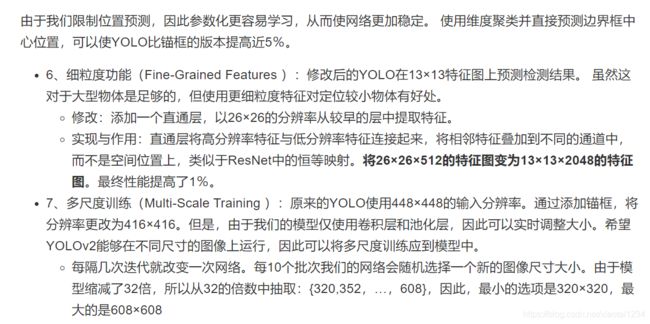
改进方法

结构与训练





联合分类与检测训练-YOLO9000(了解)



总结

2.YOLOV3介绍

改进

总结

九、SSD算法原理
1.SSD
简介

结构

流程

Detector & classifier


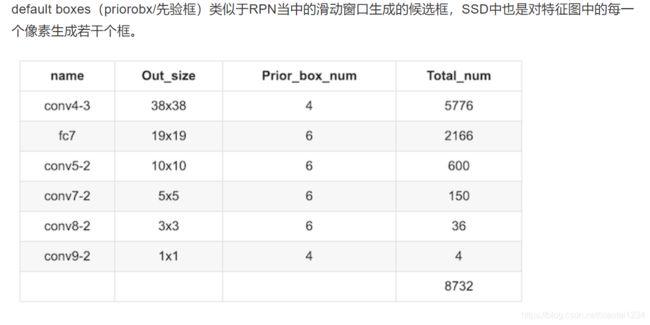
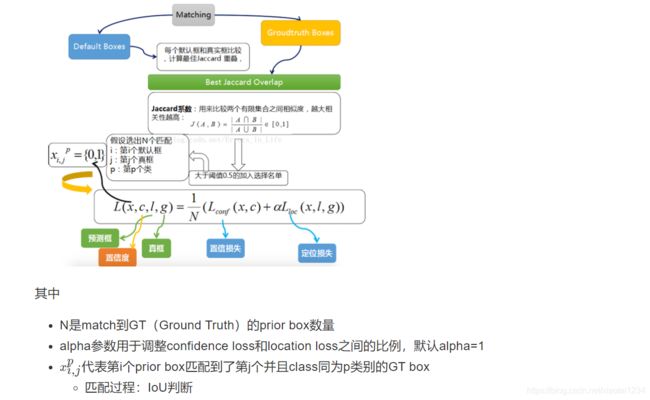
PriorBox层-default boxes




1、SSD网络prior_box:打印出来的形状为:
Tensor("concat_2:0", shape=(?, 7308, 8), dtype=float32)
# 其中某一层的结构输出
layer {
name: "conv6_2_mbox_priorbox"
type: "PriorBox"
bottom: "conv6_2"
bottom: "data"
top: "conv6_2_mbox_priorbox"
prior_box_param {
min_size: 111.0
max_size: 162.0
aspect_ratio: 2.0
aspect_ratio: 3.0
flip: true
clip: false
variance: 0.10000000149
variance: 0.10000000149
variance: 0.20000000298
variance: 0.20000000298
step: 32.0
offset: 0.5
}
prior box使用过程



def decode(default_boxes, locs, variance=[0.1, 0.2]):
""" 对default_boxes进行解码到坐标coordinates
Args:
default_boxes: tensor (num_default, 4)
of format (cx, cy, w, h)
locs: tensor (batch_size, num_default, 4)
of format (cx, cy, w, h)
variance: variance for center point and size
Returns:
boxes: tensor (num_default, 4)
of format (xmin, ymin, xmax, ymax)
"""
# 解码过程
locs = tf.concat([
locs[..., :2] * variance[0] *
default_boxes[:, 2:] + default_boxes[:, :2],
tf.math.exp(locs[..., 2:] * variance[1]) * default_boxes[:, 2:]], axis=-1)
# (cx, cy, w, h)->(xmin, ymin, xmax, ymax)
boxes = transform_center_to_corner(locs)
return boxes
def encode(default_boxes, boxes, variance=[0.1, 0.2]):
""" Compute regression values
Args:
default_boxes: tensor (num_default, 4)
of format (cx, cy, w, h)
boxes: tensor (num_default, 4)
of format (xmin, ymin, xmax, ymax)
variance: variance for center point and size
Returns:
locs: regression values, tensor (num_default, 4)
"""
# (xmin, ymin, xmax, ymax)->(cx, cy, w, h)
transformed_boxes = transform_corner_to_center(boxes)
# 编码过程
locs = tf.concat([
(transformed_boxes[..., :2] - default_boxes[:, :2]
) / (default_boxes[:, 2:] * variance[0]),
tf.math.log(transformed_boxes[..., 2:] / default_boxes[:, 2:]) / variance[1]],
axis=-1)
return locs

2.训练与测试流程
train流程

test流程

3.SSD实验与总结
实验


总结

十、案例:KITTI 人、车物体检测
1.KITTI 数据集介绍




2.YOLOV3源码实现分析
源码模型下载

YOLOV3-Tensorflow2.0源码分析

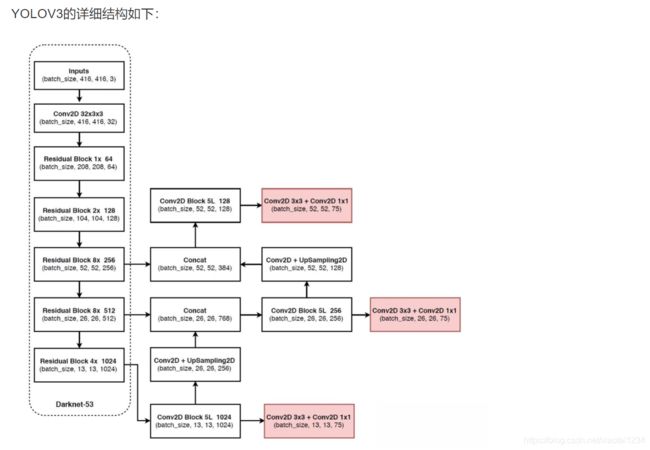
def YoloV3(size=None, channels=3, anchors=yolo_anchors,
masks=yolo_anchor_masks, classes=80, training=False):
x = inputs = Input([size, size, channels])
x_36, x_61, x = Darknet(name='yolo_darknet')(x)
# 下面通过YOLO的后续
x = YoloConv(512, name='yolo_conv_0')(x)
output_0 = YoloOutput(512, len(masks[0]), classes, name='yolo_output_0')(x)
x = YoloConv(256, name='yolo_conv_1')((x, x_61))
output_1 = YoloOutput(256, len(masks[1]), classes, name='yolo_output_1')(x)
x = YoloConv(128, name='yolo_conv_2')((x, x_36))
output_2 = YoloOutput(128, len(masks[2]), classes, name='yolo_output_2')(x)
if training:
return Model(inputs, (output_0, output_1, output_2), name='yolov3')
boxes_0 = Lambda(lambda x: yolo_boxes(x, anchors[masks[0]], classes),
name='yolo_boxes_0')(output_0)
boxes_1 = Lambda(lambda x: yolo_boxes(x, anchors[masks[1]], classes),
name='yolo_boxes_1')(output_1)
boxes_2 = Lambda(lambda x: yolo_boxes(x, anchors[masks[2]], classes),
name='yolo_boxes_2')(output_2)
outputs = Lambda(lambda x: yolo_nms(x, anchors, masks, classes),
name='yolo_nms')((boxes_0[:3], boxes_1[:3], boxes_2[:3]))
return Model(inputs, outputs, name='yolov3')
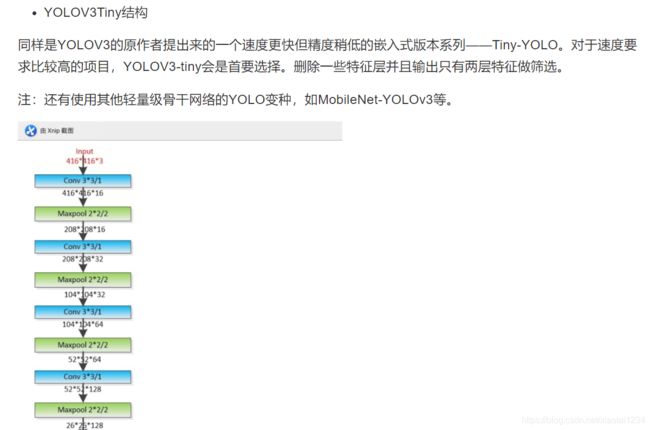

def YoloV3Tiny(size=None, channels=3, anchors=yolo_tiny_anchors,
masks=yolo_tiny_anchor_masks, classes=80, training=False):
x = inputs = Input([size, size, channels])
x_8, x = DarknetTiny(name='yolo_darknet')(x)
x = YoloConvTiny(256, name='yolo_conv_0')(x)
output_0 = YoloOutput(256, len(masks[0]), classes, name='yolo_output_0')(x)
x = YoloConvTiny(128, name='yolo_conv_1')((x, x_8))
output_1 = YoloOutput(128, len(masks[1]), classes, name='yolo_output_1')(x)
if training:
return Model(inputs, (output_0, output_1), name='yolov3')
boxes_0 = Lambda(lambda x: yolo_boxes(x, anchors[masks[0]], classes),
name='yolo_boxes_0')(output_0)
boxes_1 = Lambda(lambda x: yolo_boxes(x, anchors[masks[1]], classes),
name='yolo_boxes_1')(output_1)
outputs = Lambda(lambda x: yolo_nms(x, anchors, masks, classes),
name='yolo_nms')((boxes_0[:3], boxes_1[:3]))
return Model(inputs, outputs, name='yolov3_tiny')

# 1、重复若干层DarknetBlock,里面包含残差模块,输出包含三层特征
def Darknet(name=None):
x = inputs = Input([None, None, 3])
x = DarknetConv(x, 32, 3)
x = DarknetBlock(x, 64, 1)
x = DarknetBlock(x, 128, 2) # skip connection
x = x_36 = DarknetBlock(x, 256, 8) # skip connection
x = x_61 = DarknetBlock(x, 512, 8)
x = DarknetBlock(x, 1024, 4)
return tf.keras.Model(inputs, (x_36, x_61, x), name=name)
def DarknetBlock(x, filters, blocks):
x = DarknetConv(x, filters, 3, strides=2)
for _ in range(blocks):
x = DarknetResidual(x, filters)
return x
# 2、实现删除残差模块,进行若干层采样,并且输出只有两层特征
def DarknetTiny(name=None):
x = inputs = Input([None, None, 3])
x = DarknetConv(x, 16, 3)
x = MaxPool2D(2, 2, 'same')(x)
x = DarknetConv(x, 32, 3)
x = MaxPool2D(2, 2, 'same')(x)
x = DarknetConv(x, 64, 3)
x = MaxPool2D(2, 2, 'same')(x)
x = DarknetConv(x, 128, 3)
x = MaxPool2D(2, 2, 'same')(x)
x = x_8 = DarknetConv(x, 256, 3) # skip connection
x = MaxPool2D(2, 2, 'same')(x)
x = DarknetConv(x, 512, 3)
x = MaxPool2D(2, 1, 'same')(x)
x = DarknetConv(x, 1024, 3)
return tf.keras.Model(inputs, (x_8, x), name=name)

3.KITTI人车检测项目
项目目录与模块

项目步骤分析

4.数据集类型转换-KITTI数据集转换成TFRecords文件
TFRecord-TensorFlow 数据集存储格式

[
{ # example 1 (tf.train.Example)
'feature_1': tf.train.Feature,
...
'feature_k': tf.train.Feature
},
...
{ # example N (tf.train.Example)
'feature_1': tf.train.Feature,
...
'feature_k': tf.train.Feature
}
]
# 字典结构如
feature = {
'image': tf.train.Feature(bytes_list=tf.train.BytesList(value=[image])), # 图片是一个 Bytes 对象
'label': tf.train.Feature(int64_list=tf.train.Int64List(value=[label])) # 标签是一个 Int 对象
}


import os
import tensorflow as tf
import os
os.environ["TF_CPP_MIN_LOG_LEVEL"] = "2"
train_cats_dir = './cats_vs_dogs/train/cats/'
train_dogs_dir = './cats_vs_dogs/train/dogs/'
tfrecord_file = './cats_vs_dogs/train.tfrecords'
train_cat_filenames = [train_cats_dir + filename for filename in os.listdir(train_cats_dir)]
train_dog_filenames = [train_dogs_dir + filename for filename in os.listdir(train_dogs_dir)]
train_filenames = train_cat_filenames + train_dog_filenames
train_labels = [0] * len(train_cat_filenames) + [1] * len(train_dog_filenames) # 将 cat 类的标签设为0,dog 类的标签设为1

with tf.io.TFRecordWriter(tfrecord_file) as writer:
for filename, label in zip(train_filenames, train_labels):
# 1、读取数据集图片到内存,image 为一个 Byte 类型的字符串
image = open(filename, 'rb').read()
# 2、建立 tf.train.Feature 字典
feature = {
'image': tf.train.Feature(bytes_list=tf.train.BytesList(value=[image])), # 图片是一个 Bytes 对象
'label': tf.train.Feature(int64_list=tf.train.Int64List(value=[label])) # 标签是一个 Int 对象
}
# 3、通过字典建立 Example
example = tf.train.Example(features=tf.train.Features(feature=feature))
# 4\将Example序列化并写入 TFRecord 文件
writer.write(example.SerializeToString())

# 1、读取 TFRecord 文件
raw_dataset = tf.data.TFRecordDataset(tfrecord_file)
# 2、定义Feature结构,告诉解码器每个Feature的类型是什么
feature_description = {
'image': tf.io.FixedLenFeature([], tf.string),
'label': tf.io.FixedLenFeature([], tf.int64),
}
# 3、将 TFRecord 文件中的每一个序列化的 tf.train.Example 解码
def _parse_example(example_string):
feature_dict = tf.io.parse_single_example(example_string, feature_description)
feature_dict['image'] = tf.io.decode_jpeg(feature_dict['image']) # 解码JPEG图片
return feature_dict['image'], feature_dict['label']
dataset = raw_dataset.map(_parse_example)
for image, label in dataset:
print(image, label)

KITTI数据集转换成TFRecords文件

import hashlib
import io
import os
import numpy as np
import PIL.Image as pil
from PIL import Image
import tensorflow as tf
import feature_parse
from IoU import iou
import argparse
import sys
parser = argparse.ArgumentParser()
parser.add_argument('--data_dir', type=str, default='../data/kitti/',
help='kitti数据集的位置')
parser.add_argument('--output_path', type=str, default='../data/kitti_tfrecords/',
help='TFRecord文件的输出位置')
parser.add_argument('--classes_to_use', default='car ,van ,truck ,pedestrian ,cyclist ,tram', help='KITTI中需要检测的类别')
parser.add_argument('--validation_set_size', type=int, default=500,
help='验证集数据集使用大小')
编写的主函数逻辑如下:
def convert_kitti_to_tfrecords(data_dir, output_path, classes_to_use,
validation_set_size):
"""
将KITTI detection 转换成TFRecords.
:param data_dir: 源数据目录
:param output_path: 输出文件目录
:param classes_to_use: 选择需要使用的类别
:param validation_set_size: 验证集大小
:return:
"""
train_count = 0
val_count = 0
# 1、创建KITTI训练和验证集的tfrecord位置
# 标注信息位置
annotation_dir = os.path.join(data_dir,
'training',
'label_2')
# 图片位置
image_dir = os.path.join(data_dir,
'data_object_image_2',
'training',
'image_2')
train_writer = tf.io.TFRecordWriter(output_path + 'train.tfrecord')
val_writer = tf.io.TFRecordWriter(output_path + 'val.tfrecord')
# 2、列出所有的图片,进行每张图片的内容和标注信息的获取,写入到tfrecords文件
images = sorted(os.listdir(image_dir))
for img_name in images:
# (1)获取当前图片的编号数据,并拼接读取相应标注文件
img_num = int(img_name.split('.')[0])
# (2)读取标签文件函数
# 整数需要进行填充成与标签文件相同的6位字符串
img_anno = read_annotation_file(os.path.join(annotation_dir,
str(img_num).zfill(6) + '.txt'))
# (3)过滤标签函数
# 当前图片的标注中 过滤掉一些没有用的类别和dontcare区域的annotations
annotation_for_image = filter_annotations(img_anno, classes_to_use)
# (4)写入训练和验证集合TFRecord文件
# 读取拼接的图片路径,然后与过滤之后的标注结果进行合并到一个example中
image_path = os.path.join(image_dir, img_name)
example = prepare_example(image_path, annotation_for_image)
# 如果小于验证集数量大小就直接写入验证集,否则写入训练集
is_validation_img = img_num < validation_set_size
if is_validation_img:
val_writer.write(example.SerializeToString())
val_count += 1
else:
train_writer.write(example.SerializeToString())
train_count += 1
train_writer.close()
val_writer.close()
def main(args):
convert_kitti_to_tfrecords(
data_dir=args.data_dir,
output_path=args.output_path,
classes_to_use=args.classes_to_use.split(','),
validation_set_size=args.validation_set_size)
if __name__ == '__main__':
args = parser.parse_args(sys.argv[1:])
main(args)
读取读取标签文件函数
def read_annotation_file(filename):
with open(filename) as f:
content = f.readlines()
# 分割解析内容
content = [x.strip().split(' ') for x in content]
# 保存内容到字典结构
anno = dict()
anno['type'] = np.array([x[0].lower() for x in content])
anno['truncated'] = np.array([float(x[1]) for x in content])
anno['occluded'] = np.array([int(x[2]) for x in content])
anno['alpha'] = np.array([float(x[3]) for x in content])
anno['2d_bbox_left'] = np.array([float(x[4]) for x in content])
anno['2d_bbox_top'] = np.array([float(x[5]) for x in content])
anno['2d_bbox_right'] = np.array([float(x[6]) for x in content])
anno['2d_bbox_bottom'] = np.array([float(x[7]) for x in content])
return anno
过滤标签函数
def filter_annotations(img_all_annotations, used_classes):
"""
过滤掉一些没有用的类别和dontcare区域的annotations
:param img_all_annotations: 图片的所有标注
:param used_classes: 需要留下记录的列别
:return:
"""
img_filtered_annotations = {}
# 1、过滤这个图片中标注的我们训练指定不需要的类别,把索引记录下来
# 方便后面在处理对应的一些坐标时候使用
relevant_annotation_indices = [
i for i, x in enumerate(img_all_annotations['type']) if x in used_classes
]
# 2、获取过滤后的下标对应某个标记物体的其它信息
for key in img_all_annotations.keys():
img_filtered_annotations[key] = (
img_all_annotations[key][relevant_annotation_indices])
# 3、如果dontcare在我们要获取的类别里面,也进行组合获取,然后过滤相关的bboxes不符合要求的
if 'dontcare' in used_classes:
dont_care_indices = [i for i,
x in enumerate(img_filtered_annotations['type'])
if x == 'dontcare']
# bounding box的格式[y_min, x_min, y_max, x_max]
all_boxes = np.stack([img_filtered_annotations['2d_bbox_top'],
img_filtered_annotations['2d_bbox_left'],
img_filtered_annotations['2d_bbox_bottom'],
img_filtered_annotations['2d_bbox_right']],
axis=1)
# 计算bboxesIOU,比如这样的
# Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56
# DontCare -1 -1 -10 503.89 169.71 590.61 190.13 -1 -1 -1 -1000 -1000 -1000 -10
# DontCare -1 -1 -10 511.35 174.96 527.81 187.45 -1 -1 -1 -1000 -1000 -1000 -10
# DontCare -1 -1 -10 532.37 176.35 542.68 185.27 -1 -1 -1 -1000 -1000 -1000 -10
# DontCare -1 -1 -10 559.62 175.83 575.40 183.15 -1 -1 -1 -1000 -1000 -1000 -10
ious = iou(boxes1=all_boxes,
boxes2=all_boxes[dont_care_indices])
# 删除所有 bounding boxes 与 dontcare region 重叠的区域
if ious.size > 0:
# 找出下标
boxes_to_remove = np.amax(ious, axis=1) > 0.0
for key in img_all_annotations.keys():
img_filtered_annotations[key] = (
img_filtered_annotations[key][np.logical_not(boxes_to_remove)])
return img_filtered_annotations
读取文件标准信息、过滤标注信息、进行构造example的feature字典
def prepare_example(image_path, annotations):
"""
对一个图片的Annotations转换成tf.Example proto.
:param image_path:
:param annotations:
:return:
"""
# 1、读取图片内容,转换成数组格式
with open(image_path, 'rb') as fid:
encoded_png = fid.read()
encoded_png_io = io.BytesIO(encoded_png)
image = pil.open(encoded_png_io)
image = np.asarray(image)
# 2、构造协议中需要的字典键的值
# sha256加密结果
key = hashlib.sha256(encoded_png).hexdigest()
# 进行坐标处理
width = int(image.shape[1])
height = int(image.shape[0])
# 存储极坐标归一化格式
xmin_norm = annotations['2d_bbox_left'] / float(width)
ymin_norm = annotations['2d_bbox_top'] / float(height)
xmax_norm = annotations['2d_bbox_right'] / float(width)
ymax_norm = annotations['2d_bbox_bottom'] / float(height)
# 其他信息,难度以及字符串类别
difficult_obj = [0] * len(xmin_norm)
classes_text = [x.encode('utf8') for x in annotations['type']]
# 3、构造协议example
example = tf.train.Example(features=tf.train.Features(feature={
'image/height': feature_parse.int64_feature(height),
'image/width': feature_parse.int64_feature(width),
'image/filename': feature_parse.bytes_feature(image_path.encode('utf8')),
'image/source_id': feature_parse.bytes_feature(image_path.encode('utf8')),
'image/key/sha256': feature_parse.bytes_feature(key.encode('utf8')),
'image/encoded': feature_parse.bytes_feature(encoded_png),
'image/format': feature_parse.bytes_feature('png'.encode('utf8')),
'image/object/bbox/xmin': feature_parse.float_list_feature(xmin_norm),
'image/object/bbox/xmax': feature_parse.float_list_feature(xmax_norm),
'image/object/bbox/ymin': feature_parse.float_list_feature(ymin_norm),
'image/object/bbox/ymax': feature_parse.float_list_feature(ymax_norm),
'image/object/class/text': feature_parse.bytes_list_feature(classes_text),
'image/object/difficult': feature_parse.int64_list_feature(difficult_obj),
'image/object/truncated': feature_parse.float_list_feature(
annotations['truncated'])
}))
return example

十一、案例:KITTI人、车检测案例-训练、检测
1.训练过程实现

import logging
import tensorflow as tf
import numpy as np
import cv2
import sys
import argparse
import os
os.environ["TF_CPP_MIN_LOG_LEVEL"] = "2"
from tensorflow.keras.callbacks import (
ReduceLROnPlateau,
EarlyStopping,
ModelCheckpoint,
TensorBoard
)
from yolov3_tf2.models import (
YoloV3, YoloV3Tiny, YoloLoss,
yolo_anchors, yolo_anchor_masks,
yolo_tiny_anchors, yolo_tiny_anchor_masks
)
from yolov3_tf2.utils import freeze_all
import yolov3_tf2.dataset as dataset
parser = argparse.ArgumentParser()
parser.add_argument('--dataset', type=str, default='./data/kitti_tfrecords/train.tfrecord',
help='训练数据集路径')
parser.add_argument('--val_dataset', type=str, default='./data/kitti_tfrecords/val.tfrecord',
help='验证集目录')
parser.add_argument('--tiny', type=bool, default=False, help='加载的模型类型yolov3 or yolov3-tiny')
parser.add_argument('--weights', type=str, default='./checkpoints/yolov3_train_1.tf',
help='模型预训练权重路径')
parser.add_argument('--classes', type=str, default='./data/kitti.names',
help='类别文件路径')
parser.add_argument('--mode', type=str, default='fit', choices=['fit', 'eager_tf'],
help='fit: model.fit模式, eager_tf: 自定义GradientTape模式')
parser.add_argument('--transfer', type=str, default='none', choices=['none', 'darknet',
'no_output', 'frozen',
'fine_tune'],
help='none: 全部进行训练'
'迁移学习并冻结所有, fine_tune: 迁移并只冻结darknet')
parser.add_argument('--size', type=int, default=416,
help='图片大小')
parser.add_argument('--epochs', type=int, default=2,
help='迭代次数')
parser.add_argument('--batch_size', type=int, default=8,
help='每批次大小')
parser.add_argument('--learning_rate', type=float, default=1e-3,
help='学习率')
parser.add_argument('--num_classes', type=int, default=6,
help='类别数量')


# 2、获取传入参数的训练数据
if args.dataset:
train_dataset = dataset.load_tfrecord_dataset(
args.dataset, args.classes)
train_dataset = train_dataset.shuffle(buffer_size=1024)
train_dataset = train_dataset.batch(args.batch_size)
train_dataset = train_dataset.map(lambda x, y: (
dataset.transform_images(x, args.size),
dataset.transform_targets(y, anchors, anchor_masks, 6)))
train_dataset = train_dataset.prefetch(
buffer_size=tf.data.experimental.AUTOTUNE)
# 3、获取传入参数的验证集数据
if args.val_dataset:
val_dataset = dataset.load_tfrecord_dataset(
args.val_dataset, args.classes)
val_dataset = val_dataset.batch(args.batch_size)
val_dataset = val_dataset.map(lambda x, y: (
dataset.transform_images(x, args.size),
dataset.transform_targets(y, anchors, anchor_masks, 6)))

# 4、判断是否进行迁移学习
if args.transfer != 'none':
# 加载与训练模型'./data/yolov3.weights'
model.load_weights(args.weights)
if args.transfer == 'fine_tune':
# 冻结darknet
darknet = model.get_layer('yolo_darknet')
freeze_all(darknet)
elif args.mode == 'frozen':
# 冻结所有层
freeze_all(model)
else:
# 重置网络后端结构
if args.tiny:
init_model = YoloV3Tiny(
args.size, training=True, classes=args.num_classes)
else:
init_model = YoloV3(
args.size, training=True, classes=args.num_classes)
# 如果迁移指的是darknet
if args.transfer == 'darknet':
# 获取网络的权重
for l in model.layers:
if l.name != 'yolo_darknet' and l.name.startswith('yolo_'):
l.set_weights(init_model.get_layer(
l.name).get_weights())
else:
freeze_all(l)
elif args.transfer == 'no_output':
for l in model.layers:
if l.name.startswith('yolo_output'):
l.set_weights(init_model.get_layer(
l.name).get_weights())
else:
freeze_all(l)
# 需要从模型文件中导入utils中的freeze_all函数
def freeze_all(model, frozen=True):
model.trainable = not frozen
if isinstance(model, tf.keras.Model):
for l in model.layers:
freeze_all(l, frozen)
if args.mode == 'eager_tf':
# 1、定义评估方式
avg_loss = tf.keras.metrics.Mean('loss', dtype=tf.float32)
avg_val_loss = tf.keras.metrics.Mean('val_loss', dtype=tf.float32)
# 2、迭代优化
for epoch in range(1, args.epochs + 1):
for batch, (images, labels) in enumerate(train_dataset):
with tf.GradientTape() as tape:
# 1、计算模型输出和损失
outputs = model(images, training=True)
regularization_loss = tf.reduce_sum(model.losses)
pred_loss = []
for output, label, loss_fn in zip(outputs, labels, loss):
# 根据输出和标签计算出损失
pred_loss.append(loss_fn(label, output))
# 计算总损失 = 平均损失 + regularization_loss
total_loss = tf.reduce_sum(pred_loss) + regularization_loss
# 计算梯度以及更新梯度
grads = tape.gradient(total_loss, model.trainable_variables)
optimizer.apply_gradients(
zip(grads, model.trainable_variables))
# 打印日志
logging.info("{}_train_{}, {}, {}".format(
epoch, batch, total_loss.numpy(),
list(map(lambda x: np.sum(x.numpy()), pred_loss))))
avg_loss.update_state(total_loss)
# 验证数据集验证输出计算
for batch, (images, labels) in enumerate(val_dataset):
outputs = model(images)
# 求损失
regularization_loss = tf.reduce_sum(model.losses)
pred_loss = []
# 输出结果和标签计算损失
for output, label, loss_fn in zip(outputs, labels, loss):
pred_loss.append(loss_fn(label, output))
total_loss = tf.reduce_sum(pred_loss) + regularization_loss
# 打印总损失
logging.info("{}_val_{}, {}, {}".format(
epoch, batch, total_loss.numpy(),
list(map(lambda x: np.sum(x.numpy()), pred_loss))))
avg_val_loss.update_state(total_loss)
logging.info("{}, train: {}, val: {}".format(
epoch,
avg_loss.result().numpy(),
avg_val_loss.result().numpy()))
# 保存模型位置
avg_loss.reset_states()
avg_val_loss.reset_states()
model.save_weights(
'checkpoints/yolov3_train_{}.tf'.format(epoch))
else:
# 指定相关回调函数,自定义需求,对于检测来讲不需要太多的优化算法方式
model.compile(optimizer=optimizer, loss=loss)
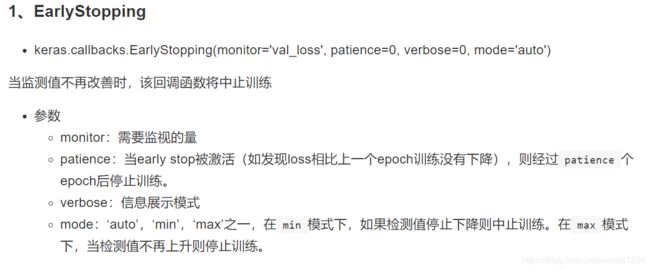
callbacks = [
EarlyStopping(patience=3, verbose=1),
ModelCheckpoint('checkpoints/yolov3_train_{epoch}.tf',
verbose=1, save_weights_only=True),
TensorBoard(log_dir='logs')
]
history = model.fit(train_dataset,
epochs=args.epochs,
callbacks=callbacks,
validation_data=val_dataset)
2.测试过程实现
import time
import logging
import cv2
import numpy as np
import tensorflow as tf
import os
os.environ["TF_CPP_MIN_LOG_LEVEL"] = "2"
from yolov3_tf2.models import (
YoloV3, YoloV3Tiny
)
from yolov3_tf2.dataset import transform_images
from yolov3_tf2.utils import draw_outputs
import argparse
import sys
parser = argparse.ArgumentParser()
parser.add_argument('--classes', type=str, default='./data/kitti.names',
help='类别配置路径')
parser.add_argument('--weights', type=str, default='./checkpoints/yolov3_train_1.tf',
help='训练好的模型位置')
parser.add_argument('--tiny', type=bool, default=False, help='加载的模型类型yolov3 or yolov3-tiny')
parser.add_argument('--size', type=int, default=416,
help='图片大小')
parser.add_argument('--image', type=str, default='./data/kitti/data_object_image_2/testing/image_2/000008.png',
help='输入预测图片的位置')
parser.add_argument('--output', type=str, default='./output.jpg',
help='输出图片结果的位置')
parser.add_argument('--num_classes', type=int, default=6,
help='总共类别数量')
整体过程实现逻辑:
def main(args):
# 1、初始化模型并加载权重
if args.tiny:
yolo = YoloV3Tiny(classes=args.num_classes)
else:
yolo = YoloV3(classes=args.num_classes)
yolo.load_weights(args.weights)
logging.info('加载模型权重weights')
# 加载目标类型
class_names = [c.strip() for c in open(args.classes).readlines()]
# 2、加载图片处理图片并使用模型进行预测
img = tf.image.decode_image(open(args.image, 'rb').read(), channels=3)
img = tf.expand_dims(img, 0)
img = transform_images(img, args.size)
# 记录时间
t1 = time.time()
boxes, scores, classes, nums = yolo(img)
t2 = time.time()
logging.info('耗时: {}'.format(t2 - t1))
logging.info('检测结果:')
print(boxes, scores, classes, nums)
for i in range(nums[0]):
logging.info('\t{}, {}, {}'.format(class_names[int(classes[0][i])],
np.array(scores[0][i]),
np.array(boxes[0][i])))
# 3、显示图片并将图片框画出
img = cv2.imread(args.image)
img = draw_outputs(img, (boxes, scores, classes, nums), class_names)
cv2.imwrite(args.output, img)
logging.info('output saved to: {}'.format(args.output))
if __name__ == '__main__':
args = parser.parse_args(sys.argv[1:])
main(args)


def yolo_nms(outputs, anchors, masks, classes):
# boxes, conf, type
b, c, t = [], [], []
for o in outputs:
b.append(tf.reshape(o[0], (tf.shape(o[0])[0], -1, tf.shape(o[0])[-1])))
c.append(tf.reshape(o[1], (tf.shape(o[1])[0], -1, tf.shape(o[1])[-1])))
t.append(tf.reshape(o[2], (tf.shape(o[2])[0], -1, tf.shape(o[2])[-1])))
bbox = tf.concat(b, axis=1)
confidence = tf.concat(c, axis=1)
class_probs = tf.concat(t, axis=1)
scores = confidence * class_probs
boxes, scores, classes, valid_detections = tf.image.combined_non_max_suppression(
boxes=tf.reshape(bbox, (tf.shape(bbox)[0], -1, 1, 4)),
scores=tf.reshape(
scores, (tf.shape(scores)[0], -1, tf.shape(scores)[-1])),
max_output_size_per_class=100,
max_total_size=100,
iou_threshold=0.5,
score_threshold=0.5
)
return boxes, scores, classes, valid_detections