PyTorch - 常见神经网络
文章目录
-
- LeNet
- AlexNet
-
- Dropout
- AlexNet 网络结构
- torchvision中的AlexNet的实现
- ZFNet
- VGG-Nets
-
- VGG 各网络
- VGG-16 网络结构
- GoogLeNet
-
- 代码实现
- ResNet
- DenseNet
- RNN
- LSTM
- GRU
LeNet
- 1998年,由 LeCun 提出
- 用于手写数字识别任务
- 只有5层结构;目前看来不输入深度学习网络;但是是基本确定了卷积NN的基本架构:卷积层、池化层、全连接层;
- 很多CNN仍然沿用这个架构,在其上做了创新,如 AlexNet, ZF-Net, VGG-Nets, DenseNet
- 较简单,所以 torchvision 中没有收留此模型
LeNet 网络结构
- 输入:1 x 28 x 28 灰度图
- 第1个卷积层:20个 5x5 卷积核,stride=1;结果为 20 x 24 x 24;
- 第1个池化层:核大小为 2x2 的 Max-Pooling,stride = 2;池化后,尺寸减半,结果为 20 x 12 x 12;
- 第2个卷积层:50个5x5的卷积核,stride=1,结果为:50x8x8;
- 第2个池化层:核大小为 2x2 的 Max-Pooling,stride = 2;池化后,尺寸减半,结果为 50 x 4 x 4;
- 第1个全连接层:500个神经元;输出维度为 50x4x4;结果接入 ReLU 激活函数,增加非线性能力。
- 第2个全连接层:10个神经元;输出到 softmax 函数中,计算每个类别的得分值,完成分类;
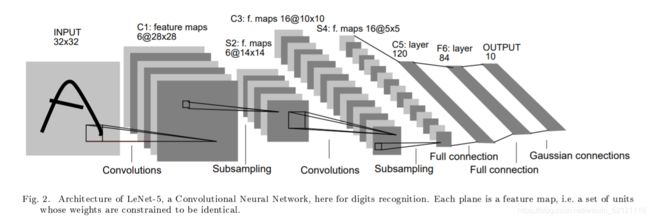
LeNet-5 网络结构
LeNet-5由七层组成(不包括输入层),每一层都包含可训练权重。
LeNet 代码实现
import torch
import torch.nn as nn
import torch.nn.functional as F
import matplotlib.pyplot as plt
class LeNet(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 20, kernal_size=(5, 5), stride=1)
self.pool1 = nn.MaxPool2d(2)
self.conv2 = nn.Conv2d(20, 50, kernel_size=(5, 5), stride=1)
self.pool2 = nn.MaxPool2d(2)
self.fc1 = nn.Linear(800, 500)
self.relu1 = nn.ReLU()
self.fc2 = nn.Linear()
self.relu2 = nn.ReLU()
def forward(self, x):
x = self.pool1(self.conv1(x))
x = self.pool2(self.conv2(x))
x = self.relu1(self.fc1(x.view(-1, 800)))
x = self.relu2(self.fc2(x))
return F.log_softmax(x)
AlexNet
- 2012年,ImageNet 竞赛冠军获得者 Hinton 和其学生 Alex Krizhevsky 设计。
- 论文:ImageNet Classification with Deep Convolutional Neural Networks
https://proceedings.neurips.cc/paper/2012/file/c399862d3b9d6b76c8436e924a68c45b-Paper.pdf
相比 LeNet 的优点:
- 网络结构更深,学习能力增强
前五层都是卷积层,后三层为全连接层;使用 softmax 函数完成了 1000个类别的多分类任务; - 使用了数据增强,增加了模型的泛化能力
数据增强方式:随机裁剪、旋转角度、变换图片亮度等 - 引入了 DropOut,避免过拟合
引入机器学习集成算法的思想,让FC的神经元以一定的概率失活(常用概率:50%),失活的神经元不参与前向传播和反向传播;经过 dropout 后,使用输出值除以失活概率以突出被选中的神经元。 - 引入局部响应归一化处理 LRN
其他特点
- 相比 LeNet 拥有更多卷积层,但结构和流程没有变化;受当时 GPU 设备限制,采用双 GPU 设备并行训练;
- LRN: Local Response Normalization,局部响应归一化
Dropout
a = torch.Tensor([[1, 2, 3, 4], [5, 6, 7, 8]])
b = nn.Dropout(0.5)
b(a)
'''
tensor([[ 0., 0., 0., 8.],
[10., 12., 14., 16.]])
'''
AlexNet 网络结构

torchvision中的AlexNet的实现
参考:https://blog.csdn.net/pengchengliu/article/details/108909195
import torch
import torch.nn as nn
from .utils import load_state_dict_from_url
__all__ = ['AlexNet', 'alexnet']
model_urls = {
'alexnet': 'https://download.pytorch.org/models/alexnet-owt-4df8aa71.pth',
}
class AlexNet(nn.Module):
def __init__(self, num_classes=1000):
super(AlexNet, self).__init__()
self.features = nn.Sequential(
#conv1
nn.Conv2d(3, 64, kernel_size=11, stride=4, padding=2), # 3表示输入的图像是3通道的。64表示输出通道数,也就是卷积核的数量。
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
#conv2
nn.Conv2d(64, 192, kernel_size=5, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
#conv3
nn.Conv2d(192, 384, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
#conv4
nn.Conv2d(384, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
#conv5
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
)
self.avgpool = nn.AdaptiveAvgPool2d((6, 6)) #如果输入的图片不是224*224,那上面的池化输出的就可能不是6*6。而下面的FC层要求的输入必须是6*6,否则就没法运算。
self.classifier = nn.Sequential(
#FC1
nn.Dropout(), #用于减轻过拟合
nn.Linear(256 * 6 * 6, 4096), #全连接层。输入的是前面的特征图。特征图是6*6大小的,有256个特征图。自己有4096个神经元。
nn.ReLU(inplace=True),
#FC2
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(inplace=True),
#FC3
nn.Linear(4096, num_classes), #num_classes:这里是1000.
)
def forward(self, x):
x = self.features(x)
x = self.avgpool(x) #liupc:自适应的池化。
x = torch.flatten(x, 1) #拉成一个向量的形式。
x = self.classifier(x)
return x
def alexnet(pretrained=False, progress=True, **kwargs):
r"""AlexNet model architecture from the `"One weird trick..." `_ paper.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
progress (bool): If True, displays a progress bar of the download to stderr
"""
model = AlexNet(**kwargs)
if pretrained:
state_dict = load_state_dict_from_url(model_urls['alexnet'],
progress=progress)
model.load_state_dict(state_dict)
return model
ZFNet
论文:Visualizing and Understanding Convolutional Networks
https://arxiv.org/abs/1311.2901
- 是 2013年 ImageNet 竞赛中分类任务冠军
- 知名度不高。网络结构没有太大改进,只是在 AlexNet 基础上调节了参数,提升了分类性能。
- 在 AlexNet 基础上,ZFNet
- 将第一个卷积层的卷积核由11变为7
- stride 由4变为2
- 后面卷积层依次变为 384、384、256
- 增加了卷积层个数。
复现代码:
class ZFNer(nn.Module):
def __init__(self):
super().__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 96, kernel_size=(7,7), stride=(2, 2)),
nn.MaxPool2d((3, 3), stride=(2, 2)),
nn.Conv2d(96, 256, kernel_size=(5,5), stride=(2, 2)),
nn.MaxPool2d((3, 3), stride=(2, 2)),
nn.Conv2d(256, 384, kernel_size=(3,3), stride=(1, 1)),
nn.Conv2d(384, 384, kernel_size=(3,3), stride=(1, 1)),
nn.Conv2d(384, 256, kernel_size=(3,3), stride=(1, 1)),
nn.MaxPool2d((3, 3), stride=(2, 2)),
)
self.classifier = nn.Sequential(
nn.Linear(43264, 4096),
nn.ReLU(),
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(),
nn.Dropout(),
nn.Linear(4096, 1000)
)
def forward(self, x):
x = self.features(x)
x = x.view(-1, 43264)
x = self.classifier(x)
return x
VGG-Nets
- 2014年提出,牛津大学提出;获得定位任务第一名,分类任务第二名;
- VGG: Visual Geometry Group
- 使用了更深的网络结构,可看做 AlexNet 加深版;结构也沿用了 卷积层和全连接层。
VGG-16、VGG-19 的明明说明了其网络结构层数(池化层不计算在内); - 为了解决权重初始化的问题,VGG 采用预训练的方式。
VGG 各网络
VGG 训练一小部分网络,在确保这部分网络稳定后,在此基础上加深。
下图提现的是这个过程,处于D阶段(VGG-16)的时候,效果最优。

VGG-16 网络结构
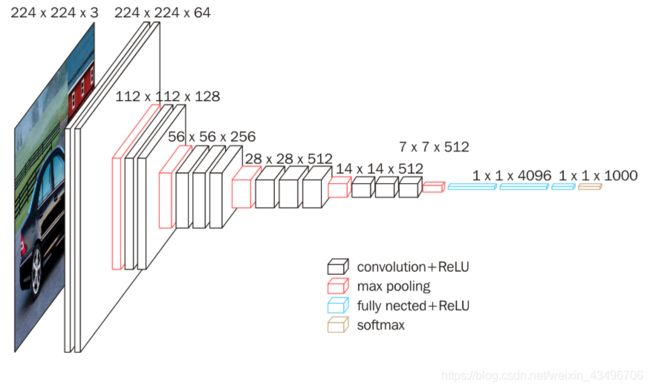
VGG-16 优点:结构更深,卷积层使用更小的卷积核尺寸和间隔。
小尺寸卷积核优点:
- 比大尺寸有更多的非线性,使判决函数更具有判决性;
- 有更少的参数。3个 3x3 卷积层参数个数为 3x3x3 = 27;一个 7x7 卷积层参数个数为 7x7 = 49。
GoogLeNet
- 2014年由Christian Szegedy提出。ImageNet 竞赛分类任务冠军。
- 在加深网络结构的同时,引入了 Inception 结构,代替卷积和激活函数。
Inception 可参考文章: https://blog.csdn.net/weixin_43821559/article/details/123379833
https://blog.csdn.net/weixin_44772440/article/details/122952961 - GoogLeNet 整个网络实际是 Inception 的堆叠。
- 论文:Going Deeper with Convolutions
https://www.cv-foundation.org/openaccess/content_cvpr_2015/papers/Szegedy_Going_Deeper_With_2015_CVPR_paper.pdf
代码实现
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, **kwargs):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, bias=False, **kwargs)
self.bn = nn.BatchNorm2d(out_channels, eps=0.01)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
return F.relu(x, inplace=True)
class Inception(nn.Module):
def __init__(self, in_channels, pool_features):
super(Inception, self).__init__()
self.branch1X1 = BasicConv2d(in_channels, 64, kernel_size=1)
self.branch5X5_1 = BasicConv2d(in_channels, 48, kernel_size=1)
self.branch5X5_2 = BasicConv2d(48, 64, kernel_size=5, padding=2)
self.branch3X3_1 = BasicConv2d(in_channels, 64, kernel_size=1)
self.branch3X3_2 = BasicConv2d(64, 96, kernel_size=3, padding=1)
self.branch_pool = BasicConv2d(in_channels, pool_features, kernel_size=1)
def forward(self, x):
branch1X1 = self.branch1X1(x)
branch5X5 = self.branch5X5_1(x)
branch5X5 = self.branch5X5_2(branch5X5)
branch3X3 = self.branch3X3_1(x)
branch3X3 = self.branch3X3_2(branch3X3)
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1X1, branch3X3, branch5X5, branch_pool]
return torch.cat(outputs, 1)
ResNet
- 2015年,何恺明推出;在 ISLVRC 和 COCO竞赛中获得冠军;
- 网络达到了152层,引入 残差单元 来解决梯度消失的问题;
关于梯度消失:梯度是从后向前传播,增加梯度后,靠前的层梯度会很小(由链式法则造成);这意味着这些曾基本上学习停滞,就是梯度消失问题。
退化问题:网络更深,参数空间更大,优化问题更难。 - 论文: Deep Residual Learning for Image Recognition
https://arxiv.org/abs/1512.03385
残差网络:
结构上看与电路的“短路”类似

代码实现
class Bottlenect(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottlenect, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
DenseNet
- 获得 2017 CVPR 年度最佳论文
Densely Connected Convolutional Networks
https://arxiv.org/abs/1608.06993 - 思想上吸收了ResNet 和 Inception 结构的特点,设计了全新的网络结构。
- 是具有密集连接的CNN;任意两层之间都有直接的连接,就是说每层的输入都是前面所有层输入的并集;这种残差结构可以缓解梯度消失的现象。
- Dense 连接仅仅是在一个 DenseBlock 中,不同的 DenseBlock 之间是没有 Dense 连接的。
- DenseLayer 的 forward 方法中,最后的输出值是输入的x 和经过网络层输出的特征图cat 拼接在一起的。在 DenseBlock 中会遍历所有的layer,经过 DenseLayer 处理后,最终组合到 Sequentical 中,形成一个完整的 Block。
- 性能好,但是占用内存大;
网络结构

代码实现:
class _DenseLayer(nn.Sequential):
def __init__(self, num_input_features, growth_rate, bn_size, drop_rate):
super(_DenseLayer, self).__init__()
self.add_module('norm1', nn.BatchNorm2d(num_input_features)),
self.add_module('relu1', nn.ReLU(inplace=True)),
self.add_module('conv1', nn.Conv2d(num_input_features, bn_size*growth_rate, kernel_size=1, stride=1, bias=False)),
self.add_module('norm2', nn.BatchNorm2d(bn_size * growth_rate)),
self.add_module('relu2', nn.ReLU(inplace=True)),
self.add_module('conv2', nn.Conv2d(bn_size*growth_rate, growth_rate, kernel_size=3, stride=1, padding=1, bias=False)),
self.drop_rate = drop_rate
def forward(self, x):
new_features = super(_DenseLayer, self).forward(x)
if self.drop_rate > 0:
new_features = F.dropout(new_features, p=self.drop_rate, training=self.training )
return torch.cat([x, new_features], 1)
class _DenseBlock(nn.Sequential):
def __init__(self, num_layers, num_input_features, bn_size, growth_rate, drop_rate):
super(_DenseBlock, self).__init__()
for i in range(num_layers):
layer = _DenseLayer(num_input_features + i * growth_rate, growth_rate, bn_size, drop_rate)
self.add_module('denselayer % d' % (i + 1), layer)
RNN
-
每个时刻的输入,都等于当前时刻的输入 和 上一时刻的记忆
-
论文: Recurrent Neural Networks as Weighted Language Recognizers
https://arxiv.org/pdf/1711.05408.pdf
class RNNCell(nn.Module):
def __init__(self, input_size, hidden_size, output_size, batch_size):
super(RNNCell, self).__init__()
self.batch_size = batch_size
self.hidden_size = hidden_size
self.i2h = nn.Linear(input_size + hidden_size, hidden_size)
self.i2o = nn.Linear(input_size + hidden_size, output_size)
self.softmax = nn.LogSoftmax(dim=1)
def forward(self, input, hidden):
combined = torch.cat((input, hidden), 1)
hidden = self.i2h(combined)
output = self.i2o(hidden)
output = self.softmax(output)
def initHidden(self):
return torch.zeros(self.batch_size, self.hidden_size)
bias = 20 # 时间跨度
input_dim = 1 # 输入数据的维度
lr = 0.01
epochs = 1000
hidden_size = 64 # 隐藏层神经元个数
num_layers = 2
nonlinearity = 'relu' # 只支持 relu 和 tanh
class RNNDemo(nn.Module):
def __init__(self, input_dim, hidden_size, num_layers, nonlinearity):
super().__init__()
self.input_dim = input_dim
self.hidden_size = hidden_size
self.num_layers = num_layers
self.nonlinearity = nonlinearity
self.rnn = nn.RNN(
input_size = input_dim,
hidden_size = hidden_size,
num_layers=num_layers,
nonlinearity=nonlinearity
)
self.out = nn.Linear(hidden_size, 1)
def forward(self, x, h):
r_out, h_state = self.rnn(x, h)
outs = []
for record in range(r_out.size(1)):
outs.append(self.out(r_out[:, record, :]))
return torch.stack(outs, dim=1), h_state
# 使用 Adam 优化器,均方差误差训练模型
rnnDemo = RNNDemo(input_dim, hidden_size, num_layers, nonlinearity)
optimizer = torch.optim.Adam(rnnDemo.parameters(), lr=lr)
loss_func = nn.MSELoss()
h_state = None
for step in range(epoches):
start, end = step * np.pi, (step + 1) * np.pi # 时间跨度
# 使用三角函数 sin 预测 cos 的值
steps = np.linspace(start, end, bins, dtype=np.float32, endpoint=False)
x_np = np.sin(steps)
y_np = np.cos(steps)
# [100, 1, 1] 尺寸大小为 (time_step, batch, input_size)
x = torch.from_numpy(x_np).unsqueeze(1).unsqueeze(2)
y = torch.from_numpy(y_np).unsqueeze(1).unsqueeze(2) # [100, 1, 1]
prediction, h_state = rnnDemo(x, h_state) # rnn输出(预测结果,隐藏状态)
# 将每次输出的中间状态传递下去(不带梯度)
h_state = h_state.detach()
loss = loss_func(prediction, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (step%10) == 0:
print('-- loss : {:.8f}'.format(loss) )
plt.scatter(steps, y_np, marker='^')
plt.scatter(steps, prediction.data.numpy().flatten(), marker='.')
plt.show()
LSTM
- 1997 年提出
- 无力解决很长的上下文依赖。主要解决比较长的短时依赖,通常是10个间隔以内。
- 主要是三个门控单元:输入门、遗忘门(核心)、输出门。
代码实现
class LstmDemo(nn.Module):
def __init__(self, input_dim, hidden_size, num_layers):
super().__init__()
self.input_dim = input_dim
self.hidden_size = hidden_size
self.num_layers = num_layers
self.lstm = nn.LSTM(
input_size = input_dim,
hidden_size=hidden_size,
num_layers=num_layers,
)
self.out = nn.Linear(hidden_size, 1)
def forward(self, x, h_0_c_0):
r_out, h_state = self.lstm(x, h_0,_c_0)
outs = []
# r_out:(h_n, c_n)
for record in range(r_out.size(1)):
outs.append(self.out(r_out[:, record, :]))
return torch.stack(outs, dim=1), h_state
lstmDemo = LstmDemo(input_dim, hidden_size, num_layers).cuda()
optimizer = torch.optim.Adam(lstmDemo.parameters(), lr=lr)
loss_func = nn.MSELoss()
h_c_state = (torch.zeros(num_layers, 1, hidden_size).cuda(), torch.zeros(num_layers, 1, hidden_size).cuda() )
for step in range(epoches):
start, end = step * np.pi, (step + 1) * np.pi # 时间跨度
steps = np.linspace(start, end, bins, dtype=np.float32, endpoint=False)
x_np = np.sin(steps)
y_np = np.cos(steps)
# [100, 1, 1] 尺寸大小为 (time_step, batch, input_size)
x = torch.from_numpy(x_np).unsqueeze(1).unsqueeze(2).cuda()
y = orch.from_numpy(y_np).unsqueeze(1).unsqueeze(2).cuda()
prediction, h_state = lstmDemo(x, h_c_state)
h_c_state = (h_state[0].detach(), h_state[1].detach() )
loss = loss_func(prediction, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if step % 100 == 0:
print('-- loss : {:.8f}'.format(loss))
plt.scatter(steps, y_np, marker='^')
plt.scatter(steps, prediction.cpu().data.numpy().flatten(), marker='^')
plt.show()
GRU
- 与 LSTM 功能相同,简化了模型:将遗忘门和输入门合成一个单一的更新门;速度快于 LSTM。
- 论文: Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling
https://arxiv.org/pdf/1412.3555.pdf
代码实现:
class GRUDemo(nn.Module):
def __init__(self, input_dim, hidden_size, num_layers):
super().__init__()
self.input_dim = input_dim
self.hidden_size = hidden_size
self.num_layers = num_layers
self.gru = nn.GRU(
input_size = input_dim,
hidden_size=hidden_size,
num_layers=num_layers,
)
self.out = nn.Linear(hidden_size, 1)
def forward(self, x, h):
r_out, h_state = self.gru(x, h)
outs = []
for record in range(r_out.size[1]):
outs.append(self.out(r_out[:, record, :]))
return torch.stack(outs, dim=1), h_state
c_state = torch.zeros(num_layers, 1, hidden_size).cuda()
for step in range(epoches):
start, end = step * np.pi, (step + 1) * np.pi # 时间跨度
steps = np.linspace(start, end, bins, dtype=np.float32, endpoint=False)
x_np = np.sin(steps)
y_np = np.cos(steps)
# [100, 1, 1] 尺寸大小为 (time_step, batch, input_size)
x = torch.from_numpy(x_np).unsqueeze(1).unsqueeze(2).cuda()
y = torch.from_numpy(y_np).unsqueeze(1).unsqueeze(2).cuda()
prediction, c_state = gruDemo(x, c_state)
c_state = c_state.detach()
loss = loss_func(prediction, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if step % 100 == 0:
print('-- loss : {:.8f}'.format(loss))
plt.scatter(steps, y_np, marker='^')
plt.scatter(steps, prediction.cpu().data.numpy().flatten(), marker='^')
plt.show()
2022-11-14(六)