ROS理论与实践(以移动机器人为例)连载(九) ——机器人自主导航
本章功能包链接: https://pan.baidu.com/s/1a6hUN4S3kdHzB6UplAtkrQ 密码: ri5s
可以扩展阅读的资料链接↓

Fetch Robotics 仓储机器人:https://fetchrobotics.com/products-technology/cloud-robotics-platform-for-warehouse-automation/.
文章目录
- 1. ROS中的导航框架
-
- 基于move_base的导航框架 [wiki](http://wiki.ros.org/navigation)
- 2. 导航框架中的关键功能包
-
- 1)move_base
-
- ①Action 工作机制
- ②move_base功能包中的话题和服务
- ③配置move_base节点
- 2)amcl
-
- ①amcl功能包中的话题和服务
- ②配置amcl节点
- 3. 机器人自主导航案例——导航仿真
-
- 1)无动态避障效果
- 2)动态避障
- 3)通过程序控制自动导航,而不是gui
-
- ①Python
- ②CPP
- 4)move_base + gmapping
1. ROS中的导航框架
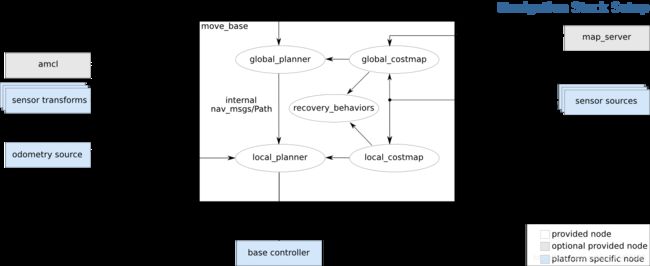
基于move_base的导航框架 wiki
sudo apt-get install ros-melodic-navigation
- global_planner:全局规划,目的是规划出最优路径;
- local_planner:本地规划,目的是根据周围障碍物避障对路径进行修改;
- global_costmap:全局代价地图;
- local_costmap:本地代价地图;
- recovery_behaviors:恢复机制,“撞了南墙能回头”;
- map_server:用来提供地图;
- amcl:输入是激光雷达信息,是一个定位功能包;
- odometry source:里程计信息,通过编码器微分得到的当前位置信息。
可以参见Setup and Configuration of the Navigation Stack on a Robot。
2. 导航框架中的关键功能包
1)move_base

- 全局路径规划(global planner)
- 全局最优路径规划;
- D i j k s t r a Dijkstra Dijkstra(最优距离)或 A ∗ A* A∗算法(时间较短)。
- 本地实时规划(local planner)
- 规划机器人每个周期内的线速度、角速度,使之尽量符合全局最优路径;
- 实时避障;
- T r a j e c t o r y Trajectory Trajectory R o l l o u t Rollout Rollout 和 D y n a m i c Dynamic Dynamic W i n d o w Window Window A p p r o a c h e s Approaches Approaches算法;
- 搜索躲避和行进的多条路径,综合各评价标准选取最优路径。
这里需要引入一种新的ROS通信机制—— A c t i o n Action Action。
在之前的通信那章已经给出了详细的讲解 跳转,这里做一个概要。
①Action 工作机制
描述图片:
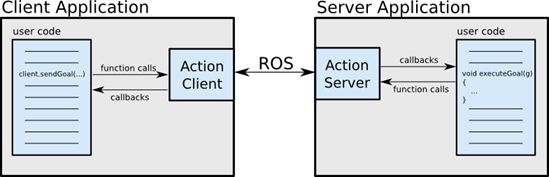
action通讯方式采用服务器/客户端的方式,通过“action protocol(协议)”进行通讯:
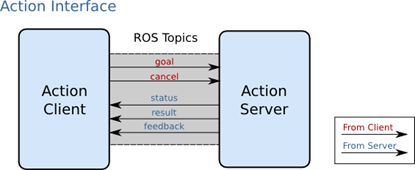
客户端可以给服务器发送目标指令和终止指令,而服务器会反馈当前状态和结果:
- goal: 任务目标
- cancel: 取消当前任务
- status: 通知client当前的状态
- feedback: 周期性反馈任务执行的监控数据
- result: 向client发送任务的执行结果(只在执行结束后发送一次)
②move_base功能包中的话题和服务
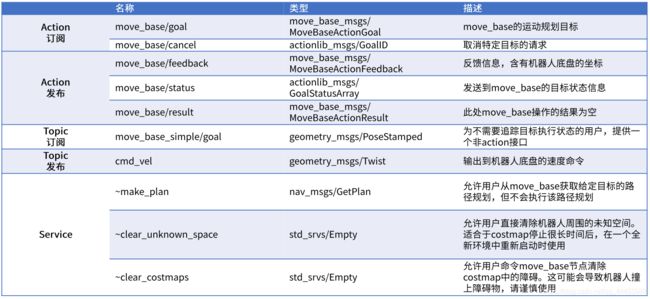
③配置move_base节点
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find mbot_navigation)/config/mbot/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find mbot_navigation)/config/mbot/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find mbot_navigation)/config/mbot/local_costmap_params.yaml" command="load" />
<rosparam file="$(find mbot_navigation)/config/mbot/global_costmap_params.yaml" command="load" />
<rosparam file="$(find mbot_navigation)/config/mbot/move_base_params.yaml" command="load" />
<rosparam file="$(find mbot_navigation)/config/mbot/dwa_local_planner_params.yaml" command="load" />
node>
launch>
这些 . y a m l .yaml .yaml 文件都是参数文件,具体的参数可以下载功能包在mbot_navigation/config/mbot下找到,根据需求进行修改。
注意:取决于大家的模型宽度,本地costmap可能会对机器人通过狭小区域造成影响,那么需要修改下面的inflation_radius称作膨胀区半径,在costmap_common_params.yaml中
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[0.175, 0.175], [0.175, -0.175], [-0.175, -0.175], [-0.175, 0.175]]
#footprint_inflation: 0.01
#robot_radius: 0.175
inflation_radius: 1.0
cost_scaling_factor: 3.0
map_type: costmap
#transform_tolerance: 1
observation_sources: scan
scan: {data_type: LaserScan, topic: /scan, marking: true, clearing: true}
2)amcl
- 蒙特卡罗定位方法
- 二维环境定位
- 针对已有地图使用粒子滤波器跟踪一个机器人的姿态
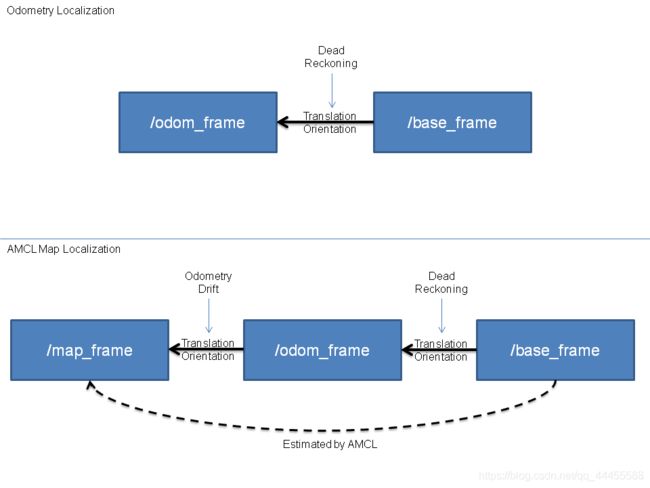
- 里程计定位: 只通过里程计的数据来处理 /base 和 /odom 之间的TF转换;
- amcl定位: 可以估算机器人在地图坐标系 /map 下的位姿信息,提供 /base、/odom、/map之间的TF变换。
①amcl功能包中的话题和服务

②配置amcl节点
<launch>
<arg name="scan_topic" default="scan"/>
<arg name="initial_pose_x" default="0.0"/>
<arg name="initial_pose_y" default="0.0"/>
<arg name="initial_pose_a" default="0.0"/>
<node pkg="amcl" type="amcl" name="amcl" clear_params="true">
<param name="min_particles" value="500"/>
<param name="max_particles" value="3000"/>
<param name="kld_err" value="0.02"/>
<param name="update_min_d" value="0.20"/>
<param name="update_min_a" value="0.20"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.5"/>
<param name="recovery_alpha_slow" value="0.00"/>
<param name="recovery_alpha_fast" value="0.00"/>
<param name="initial_pose_x" value="$(arg initial_pose_x)"/>
<param name="initial_pose_y" value="$(arg initial_pose_y)"/>
<param name="initial_pose_a" value="$(arg initial_pose_a)"/>
<param name="gui_publish_rate" value="50.0"/>
<remap from="scan" to="$(arg scan_topic)"/>
<param name="laser_max_range" value="3.5"/>
<param name="laser_max_beams" value="180"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="laser_model_type" value="likelihood_field"/>
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha1" value="0.1"/>
<param name="odom_alpha2" value="0.1"/>
<param name="odom_alpha3" value="0.1"/>
<param name="odom_alpha4" value="0.1"/>
<param name="odom_frame_id" value="odom"/>
<param name="base_frame_id" value="base_footprint"/>
node>
launch>
可以参考http://wiki.ros.org/amcl了解更多参数的信息。
3. 机器人自主导航案例——导航仿真
1)无动态避障效果
$ roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
$ roslaunch mbot_navigation nav_cloister_demo.launch
使用这两条命令打开gazebo和rviz。

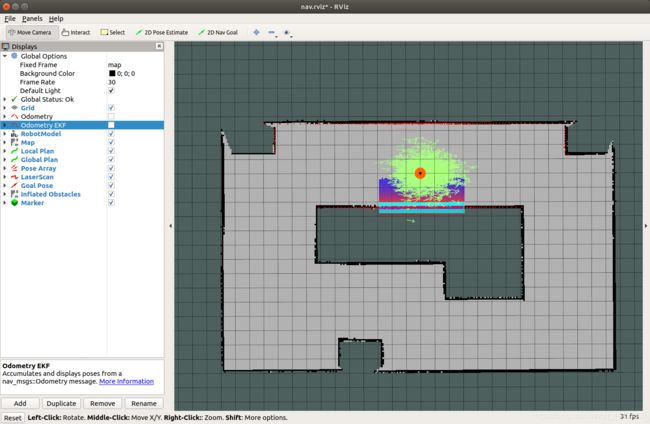
rviz图中周围的红色点是雷达的仿真信息;绿色点是amcl粒子算法中的粒子,最密集的地方就是机器人所处的位置;蓝色区域是膨胀区,相当于机器人运动的安全区域,机器人远离这个区域;紫红区域是本地代价地图,用来得到本地最优 线速度、角速度。
两个工具:![]() 左边这个用来更改机器人在仿真环境中的位置和朝向方向;右边这个用来确定导航目标点和朝向方向,确定后机器人会立即开始导航。
左边这个用来更改机器人在仿真环境中的位置和朝向方向;右边这个用来确定导航目标点和朝向方向,确定后机器人会立即开始导航。
RVIZ中的几种Plan。参考: https://blog.csdn.net/luohuiwu/article/details/93859257
nav_cloister_demo.launch:
<launch>
<arg name="map" default="cloister_gmapping.yaml" />
<node name="map_server" pkg="map_server" type="map_server" args="$(find mbot_navigation)/maps/$(arg map)"/>
<include file="$(find mbot_navigation)/launch/move_base.launch"/>
<include file="$(find mbot_navigation)/launch/amcl.launch" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find mbot_navigation)/rviz/nav.rviz"/>
launch>
cloister_gmapping.yaml是上节在建图时使用rosrun map_server map_saver -f cloister_gmapping保存的(同时保存了图片)
image: cloister_gmapping.pgm
resolution: 0.050000
origin: [-15.400000, -12.200000, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
后面分别启动了move_base和amcl节点。
2)动态避障
可以在规划路径时,在gazebo仿真中添加动态障碍物,机器人自动导航会规划出绕过该障碍物的最优路径。
3)通过程序控制自动导航,而不是gui
下面这个python的程序和cpp的程序都粘贴在这里了↓详细的注解会以注释的形式写在程序里。
①Python
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import roslib;
import rospy
import actionlib
from actionlib_msgs.msg import *
from geometry_msgs.msg import Pose, PoseWithCovarianceStamped, Point, Quaternion, Twist
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
# 节点初始化
rospy.init_node('move_test', anonymous=True)
# 订阅move_base服务器的消息
move_base = actionlib.SimpleActionClient("move_base", MoveBaseAction)
# 这里创建了一个Action的针对动作的客户端订阅move_base的信息,实现MoveBaseAction
rospy.loginfo("Waiting for move_base action server...")
# 等待连接服务器,5s等待时间限制
while move_base.wait_for_server(rospy.Duration(5.0)) == 0:
rospy.loginfo("Connected to move base server")
# 与服务器做连接,成功的话打印日志
# 设定目标点
target = Pose(Point(-5.543, -4.779, 0.000), Quaternion(0.000, 0.000, 0.645, 0.764))
# 对目标点进行封装,'map'表示这是地图里的一个点,以及朝向用四元数表示
goal = MoveBaseGoal()
goal.target_pose.pose = target
goal.target_pose.header.frame_id = 'map'
goal.target_pose.header.stamp = rospy.Time.now()
rospy.loginfo("Going to: " + str(target))
# 向目标进发
move_base.send_goal(goal)
# 五分钟时间限制
finished_within_time = move_base.wait_for_result(rospy.Duration(300))
# 等待五分钟结果
# 查看是否成功到达
if not finished_within_time:
move_base.cancel_goal()
rospy.loginfo("Timed out achieving goal")
else:
state = move_base.get_state()
if state == GoalStatus.SUCCEEDED:
rospy.loginfo("Goal succeeded!")
else:
rospy.loginfo("Goal failed! ")
②CPP
#include 效果图超过了5M就不展示了。
功能包中还有一个随机点规划导航的Python文件,这里就不做展示了,感兴趣的可以在文章开头的网盘进行下载。
4)move_base + gmapping
机器人导航同时进行建图,根据更新图和障碍物修改导航路径。
实现文件是这样的↓
<launch>
<include file="$(find mbot_navigation)/launch/gmapping.launch"/>
<include file="$(find mbot_navigation)/launch/move_base.launch" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find mbot_navigation)/rviz/nav.rviz"/>
launch>
这里很清楚打开了 gmapping SLAM节点和 move_base 导航节点。