深度学习:目标分割|UNet网络模型及案例实现
1 UNet网络架构
UNet网络由左编码部分,右解码部分和下两个卷积+激活层组成
-
编码部分
- 从图中可知:架构中是由4个重复结构组成:2个3x3卷积层,非线形ReLU层和一个stride为2的2x2 max pooling层(图中的蓝箭头,红箭头)
- 每一次下采样特征通道的数量加倍
-
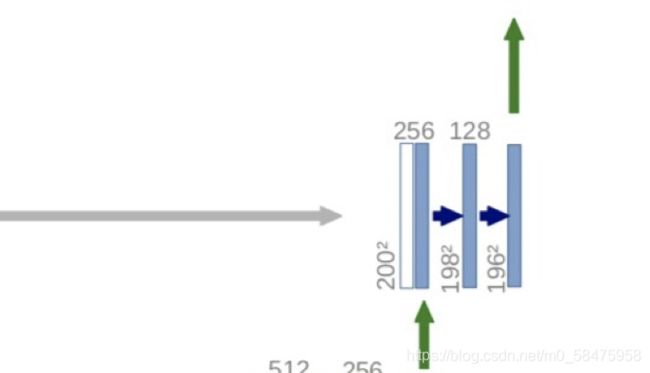
解码部分
- 和编码层类似,反卷积也有4个重复结构组成
- 每个重复结构前先使用反卷积,每次反卷积后特征通道数量减半,特征图大小加倍(绿箭头)
- 反卷积之后,反卷积的结果和编码部分对应步骤的特征图拼接起来(白/蓝块)
- 如果编码部分的特征图尺寸较大,需要进行裁剪后再拼接(左边深蓝色的虚线)
- 拼接后的特征图再进行2次3x3的卷积(右侧蓝箭头)
- 最后一层的卷积核为1x1 的卷积核,将64通道的特征图转化为特定类别数量(分类数量)的结果(青色箭头)
2 模型构建
2.1 数据集获取
from PIL import ImageOps
from tensorflow import keras
import numpy as np
import tensorflow as tf
from tensorflow.keras.layers import Input, Conv2D, Conv2DTranspose
from tensorflow.keras.layers import MaxPooling2D, Cropping2D, Concatenate
from tensorflow.keras.layers import Lambda, Activation, BatchNormalization, Dropout
from tensorflow.keras.models import Model
import random
import os
os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2'
os.environ['KMP_DUPLICATE_LIB_OK'] = 'True'
# 图像位置
input_dir = 'segdata/images/'
# 图像路径
input_img_path = sorted([os.path.join(input_dir, fname)
for fname in os.listdir(input_dir) if fname.endswith('.jpg')])
# 标注信息
target_dir = 'segdata/annotations/trimaps/'
# 标注路径
target_img_path = sorted(os.path.join(target_dir, fname) for fname in os.listdir(
target_dir) if fname.endswith('.png') and not fname.startswith('.'))
img_size = (160, 160)
batch_size = 32
num_classes = 4
使用的数据集是Oxford-IIIT Pet Dataset宠物图像分割数据集,包含37种宠物类别,其中有12种猫的类别和25种狗的类别,每个类别大约有200张图片,所有图像都具有品种,头部ROI和像素级分割的标注。
2.2 构建数据集生成器
# 1、创建数据集生成器
class OxfordPets(keras.utils.Sequence):
# 初始化
def __init__(self, batch_size, img_size, input_img_paths, target_img_paths):
# 批次大小
self.batch_size = batch_size
# 图像尺寸
self.img_size = img_size
# 输入图像的路径
self.input_img_paths = input_img_paths
# 目标值路径
self.target_img_paths = target_img_paths
# 迭代次数
def __len__(self):
return len(self.target_img_paths) // self.batch_size
# 获取batch数据
def __getitem__(self, idx):
# 获取该批次对应的样本索引
i = idx * self.batch_size
# 获取该批次数据
batch_input_img_paths = self.input_img_paths[i:i + self.batch_size]
batch_target_img_paths = self.target_img_paths[i:i + self.batch_size]
# 构建特征值
x = np.zeros((batch_size,) + self.img_size + (3,), dtype='float32')
for j, path in enumerate(batch_input_img_paths):
img = load_img(path, target_size=self.img_size)
x[j] = img
# 构建目标值
y = np.zeros((batch_size,) + self.img_size + (1,), dtype='uint8')
for j, path in enumerate(batch_target_img_paths):
img = load_img(path, target_size=self.img_size,
color_mode='grayscale')
y[j] = np.expand_dims(img, 2)
return x, y
2.3 编码部分
编码部分的特点是:

-
架构中是由4个重复结构组成:2个3x3卷积层,非线形ReLU层和一个stride为2的2x2 max pooling层
-
每一次下采样后我们都把特征通道的数量加倍
-
每次重复都有两个输出:一个用于编码部分进行特征提取,一个用于解码部分的特征融合
# 2、编码
def downsampling_block(input_tensor, filters):
# 输入:input_tensor,通道数:filters
# 卷积
x = Conv2D(filters, kernel_size=3, padding='same')(input_tensor)
# BN层
x = BatchNormalization()(x)
# 激活函数
x = Activation('relu')(x)
# 卷积层
x = Conv2D(filters, kernel_size=3, padding='same')(x)
# BN层
x = BatchNormalization()(x)
# 激活
x = Activation('relu')(x)
# 返回:池化后的值以及激活未池化的值,激活未池化的值用于解码部分特征合并
return MaxPooling2D(pool_size=2)(x), x
2.4 解码部分
- 和编码层类似,反卷积也有4个重复结构组成
- 每个重复结构前先使用反卷积,每次反卷积后特征通道数量减半,特征图大小加倍(绿箭头)
- 反卷积之后,反卷积的结果和编码部分对应步骤的特征图拼接起来(白/蓝块)
- 如果编码部分的特征图尺寸较大,需要进行裁剪后再拼接(左边深蓝色的虚线)
- 拼接后的特征图再进行2次3x3的卷积(右侧蓝箭头)
- 最后一层的卷积核为1x1 的卷积核,将64通道的特征图转化为特定类别数量(分类数量)的结果(青色箭头)
# 3、解码
def upsampling_block(input_tensor, skip_tensor, filters):
# input_tensor:输入特征层,skip_tensor:编码部分的特征图,filters:通道数
# 反卷积
x = Conv2DTranspose(filters, kernel_size=2, strides=2,
padding='same')(input_tensor)
# 获取反卷积后特征图尺寸
_, x_height, x_width, _ = x.shape
# 获取编码部分激活未池化特征图尺寸
_, s_height, s_width, _ = skip_tensor.shape
# 计算差异
h_crop = s_height - x_height
w_crop = s_width - x_width
# 判断是否进行裁剪
if h_crop == 0 and w_crop == 0:
y = skip_tensor
else:
# 获取裁剪的大小
cropping = ((h_crop // 2, h_crop - h_crop // 2),
(w_crop // 2, w_crop - w_crop // 2))
y = Cropping2D(cropping=cropping)(skip_tensor)
# 特征融合
x = Concatenate()([x, y])
# 卷积
x = Conv2D(filters, kernel_size=3, padding='same')(x)
# BN
x = BatchNormalization()(x)
# 激活层
x = Activation('relu')(x)
# 卷积
x = Conv2D(filters, kernel_size=2, padding='same')(x)
# BN
x = BatchNormalization()(x)
# 激活层
x = Activation('relu')(x)
return x
2.5 模型构建

将编码部分和解码部分组合一起,就可构建UNet网络,在这里UNet网络的深度通过depth进行设置,并设置第一个编码模块的卷积核个数通过filter进行设置,通过以下模块将编码和解码部分进行组合:
# 4、unet网络
def unet(imagesize, classes, fetures=64, depth=3):
# 定义输入
inputs = keras.Input(shape=(imagesize + (3,)))
x = inputs
# 编码部分
skips = []
for i in range(depth):
x, x0 = downsampling_block(x, fetures)
skips.append(x0)
fetures *= 2
# 卷积
x = Conv2D(filters=fetures, kernel_size=3, padding='same')(x)
# BN
x = BatchNormalization()(x)
# 激活
x = Activation('relu')(x)
# 卷积
x = Conv2D(filters=fetures, kernel_size=3, padding='same')(x)
# 激活
x = Activation('relu')(x)
# 解码部分(调转顺序,将激活未池化特征值与反卷积层融合)
for i in reversed(range(depth)):
fetures //= 2
# 输入,激活未池化特征值,通道数
x = upsampling_block(x, skips[i], fetures)
# 1x1卷积
x = Conv2D(filters=classes, kernel_size=1, padding='same')(x)
# 激活
outputs = Activation('softmax')(x)
return keras.Model(inputs=inputs, outputs=outputs)
# 实例化网络模型
model = unet(img_size, num_classes)
2.6 模型训练
2.6.1 数据集划分
数据集中的图像是按顺序进行存储的,在这里我们将数据集打乱后,验证集的数量1200,剩余的为训练集,划分训练集和验证集:
# 验证集数量设置
val_samples = 1200
# 打乱数据集(随机数种子设置)
random.Random(1).shuffle(input_img_path)
random.Random(1).shuffle(target_img_path)
# 划分数据集
# 训练集
train_input_img_paths = input_img_path[:-val_samples]
train_target_img_paths = target_img_path[:-val_samples]
# 验证集
val_input_img_paths = input_img_path[-val_samples:]
val_target_img_paths = target_img_path[-val_samples:]
2.6.2 数据集获取
train_gen = OxfordPets(batch_size, img_size, train_input_img_paths, train_target_img_paths)
val_gen = OxfordPets(batch_size, img_size, val_input_img_paths, val_target_img_paths)
2.6.3 模型编译和训练
model.compile(optimize='rmprop', loss='sparse_categorical_crossentropy')
model.fit(train_gen, epochs=10, validation_data=val_gen)
2.7模型预测
# 获取验证集数据,并进行预测
val_gen = OxfordPets(batch_size, img_size, val_input_img_paths, val_target_img_paths)
val_preds = model.predict(val_gen)
# 定义预测结果显示的方法
# 图像显示
def display_mask(i):
# 获取到第i个样本的预测结果
mask = np.argmax(val_preds[i], axis=-1)
# 维度调整
mask = np.expand_dims(mask, axis=-1)
# 转换为图像,并进行显示
img = PIL.ImageOps.autocontrast(keras.preprocessing.image.array_to_img(mask))
display(img)
# 选择某一个图像进行预测
# 选中验证集的第10个图像
i = 10
# 原图像展示
# 输入图像显示
display(Image(filename=val_input_img_paths[i]))

# 目标值展示
# 真实值显示
img = PIL.ImageOps.autocontrast(load_img(val_target_img_paths[i]))
display(img)

# 模型预测结果
# 显示预测结果
display_mask(i)
