ROS图像处理相关
文章目录
- cv_bridge
-
- ROS->OpenCV
- OpenCV->ROS
- image_transport
-
- image_transport Publishers
-
- Published topics
- Parameters
- image_transport Subscribers
- node
- opencv编解码函数
- 参考资料
cv_bridge
ROS以自己的sensor_msgs/Image消息格式传递图像,但用户希望将图像与OpenCV结合使用。在OpenCV中,图像以Mat矩阵的形式存储。
cv_bridge是一个ROS库,提供ROS图像和OpenCV图像之间的转换接口。
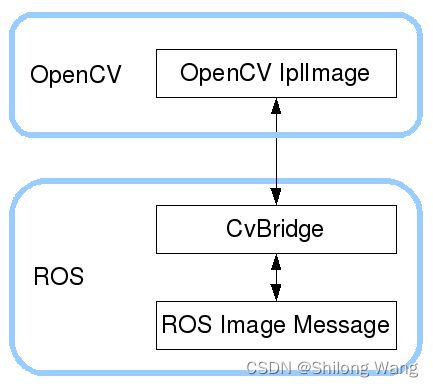
cv_bridge包定义了一个CvBridge类,用来接收ROS Image消息
namespace cv_bridge {
class CvImage
{
public:
std_msgs::Header header;
std::string encoding;
cv::Mat image;
};
typedef boost::shared_ptr<CvImage> CvImagePtr;
typedef boost::shared_ptr<CvImage const> CvImageConstPtr;
}
ROS->OpenCV
在使用时有两种情形:
- 想修改数据,必须复制一份ROS消息数据拷贝。
- 不修改数据,可以安全地共享ROS消息所拥有的数据,而不复制。
// Case 1: Always copy, 返回一个可修改的CvImage指针
CvImagePtr toCvCopy(const sensor_msgs::ImageConstPtr& source,
const std::string& encoding = std::string());
CvImagePtr toCvCopy(const sensor_msgs::Image& source,
const std::string& encoding = std::string());
// Case 2: Share if possible, 返回const CvImage指针
CvImageConstPtr toCvShare(const sensor_msgs::ImageConstPtr& source,
const std::string& encoding = std::string());
CvImageConstPtr toCvShare(const sensor_msgs::Image& source,
const boost::shared_ptr<void const>& tracked_object,
const std::string& encoding = std::string());
输入参数是图像消息(指针)和可选的目标图像编码参数。
- 如果源图像消息编码格式与参数编码格式匹配,则
toCvShare会将返回指向ROS消息数据的cv::Mat,从而避免复制。只要您持有已返回的CvImage对象,ROS消息数据就不会被释放。 - 如果编码格式不匹配,它将分配一个新的缓冲区并执行转换。不允许修改返回的CvImage,因为它可能与ROS image消息共享数据,而ROS image消息又可能与其他回调共享。
如果没有给定编码信息(或者更确切地说,空字符串),目标图像编码将与图像消息编码相同,在这种情况下,toCvShare能保证不会复制图像数据。
编码格式定义在sensor_msgs::image_encodings::下
- 8UC[1-4]
- 8SC[1-4]
- 16UC[1-4]
- 16SC[1-4]
- 32SC[1-4]
- 32FC[1-4]
- 64FC[1-4]
- rgb8
- rgba8
- rgb16
- rgba16
- bgr8
- bgra8
- bgr16
- bgra16
- mono8
- mono16
OpenCV->ROS
要将CvImage转换为ROS图像消息,请使用toImageMsg成员函数:
class CvImage
{
sensor_msgs::ImagePtr toImageMsg() const;
// Overload mainly intended for aggregate messages that contain
// a sensor_msgs::Image as a member.
void toImageMsg(sensor_msgs::Image& ros_image) const;
};
image_transport
image_transport包用于传输图片,程序以插件的形式给出,传输格式包括JPEG/PNG压缩图片格式和Thero视频流。
// Use the image_transport classes instead.
#include image_transport Publishers
image_transport publishers的使用和ROS一样,会提供一系列传输选项(JPEG compression,streaming video.etc)。不同的subscribers可以使用不同的transports策略从相同的publisher请求图片。
C++: image_transport::Publisher (API), image_transport::CameraPublisher (API)
Published topics
image_transport publishers为每一个transport发布单独的ROS Topic。
原始图片sensor_msgs/Image发布base_topic。如果有额外的插件使用,他们发布消息到base topic的子话题,格式为
Parameters
image_transport publishers没有独立的参数,但是可以通过Parameter Server实现reconfigure。
可以通过dynamic_reconfigure包来调整参数
参数格式为:
例如:
/camera/image/compressed/jpeg_quality
image_transport Subscribers
C++: image_transport::Subscriber (API), image_transport::CameraSubscriber (API)
node
$ rosrun image_transport republish [in_transport] in:=<in_base_topic> [out_transport] out:=<out_base_topic>
in_transport和out_transport是图片传输格式:raw 、compressed 和thero,对应原始图片格式、压缩图片格式和视频流格式。
假设我们使用theora视频流传输格式来发布机器人的图像。我们有几个节点收听图像主题。为了不让每个节点都单独将视频流转换为原始图片格式,浪费资源,使用image_transport包的republish节点将视频流式转换为sensor_msgs/image messages格式,重新发布到topic:
$ rosrun image_transport republish theora in:=camera/image raw out:=camera/image_decompressed
opencv编解码函数
#include 参考资料
image_transport-ROS-wiki
https://blog.csdn.net/fengbingchun/article/details/60780232