DeepSORT 多实时目标跟踪,pytorch代码,解析
原文:DeepSORT 多实时目标跟踪,pytorch代码,解析 - 知乎

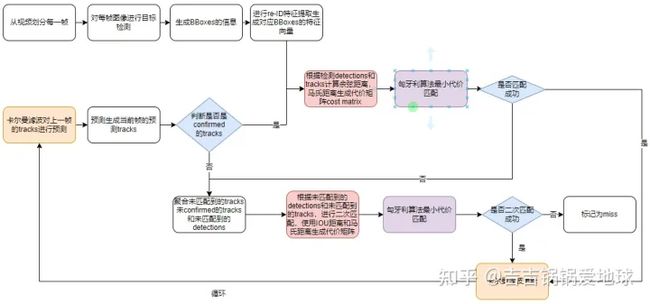
整个目标跟踪大体上是这个流程图:
1.目标检测
陈述的是图里的这一部分:

由于目标跟踪的目标检测模块的通用性,关于目标检测我就不做介绍了,可以换成诸如:YOLOV4,YOLOV3,YOLOV5,Faster RCNN,Fast RCNN等目标检测器。
这里以YOLOV4或V3的输出为例,总之根据目标检测的输出是三个张量。假设他们的shape分别为[batch_size,256,13,13],[batch_size,256,26,26],[batch_size,256,52,52]。经过了复杂的后处理后,他们的输出shape变为[n,7]。
这里的n表示可能的Bounding Boxes的数量,7表示:4个坐标(x1,y1,x2,y2),2个置信度(0-1之间),1个类别ID。
def run(self):
idx_frame = 0 #表示第几帧
while self.video.grab(): #从视频里面抓取下一帧
idx_frame += 1
if idx_frame % cfg.frame_interval:#如果不为0,如果frame_interval=1,表示每帧都用来推理,为2表示每隔一帧进行推理,依次类推
continue
start = time.time()#计时
#===============单个视频帧处理=================
_, ori_im = self.video.retrieve() #返回解码后的视频帧
boxes = self.detectOneImage.detect_one_image(ori_im)#boxes是对应的object的bbox的坐标,当前图片帧里有多少个目标=len(boxes)这里的代码中,从视频里解析每个图片帧,然后放到目标检测器里进行检测(代码的self.detectOneImage.detecti_one_image(ori_im)。返回检测到的shape=[n,7]。这个目标检测器包含了复杂的前处理和后处理部分,被封装成一个对象了。
if len(boxes)==0:
continue
boxes = torch.tensor(boxes)
bbox_xywh = boxes[:, :4] #bbox坐标,格式为center_x,center_y,box_w,box_h
cls_conf = boxes[:,5]*boxes[:,4] #类别的置信度
class_ids = boxes[:,6] #类别id然后下面进行为空判断,并取出对应的数据。
2.目标跟踪
bbox_xywh[:, 3:] *= 1.2 # 将bbox扩大一点点,以防止bbox太小
# cls_conf = cls_conf[mask]
#===================进行跟踪=========================
outputs = self.deepsort.update(bbox_xywh, cls_conf, ori_im,class_ids)
#=================绘画bbox,可视化=====================
if len(outputs) > 0:
bbox_xyxy = outputs[:, :4]
identities = outputs[:,-2]
classes_str = [self.classes[id] for id in outputs[:, -1]]
ori_im = draw_boxes(ori_im,bbox_xyxy,identities,classes_str)
end = time.time()
print("One Image spend time: {:.03f}s, fps: {:.03f}".format(end - start, 1 / (end - start)))
if cfg.display:
cv2.imshow("test", ori_im)
cv2.waitKey(1)
if cfg.save_path and os.path.isdir(cfg.save_path):
self.writer.write(ori_im)首先将目标检测的框扩大,原因是因为目标检测一般定位已经相对准确了,过于严格的定位,会导致跟踪困难,并且若定位有误差,会加大跟踪的难度。然后通过封装的跟踪器,进行跟踪。返回跟踪后的Bounding Boxes,然后进行可视化,展示可视化,保存视频。
下面将会详细讲解
outputs = self.deepsort.update(bbox_xywh, cls_conf, ori_im,class_ids)
里发生的过程。
def update(self, bbox_xywh, confidences, ori_img,class_ids):
'''
bbox_xywh:bounding box的中心坐标和w,h。
confidence:置信度
ori_img:用cv2打开的原始图片,为BGR格式
'''
ori_img = cv2.cvtColor(ori_img, cv2.COLOR_BGR2RGB) #默认的cv2图像是BGR,所以转换成RGB
self.height, self.width = ori_img.shape[:2]
#生成检测
features = self._get_features(bbox_xywh, ori_img)#将ori_img对应用box切片后进行特征提取,是一个向量首先介绍一下这三个参数的意义。
bbox_xywh:是经过目标检测到的Bounding Boxes的中心坐标xy和宽高wh。
confidences:是对应Bounding Boxes的置信度,表示该Bounding Boxes里是预测的那个物体的概率。
ori_img:是Opencv打开的原始图片。
代码,然后经过色域转换BGR->RGB格式,放入ReID网络。
3.ReID网络
陈述的是图的这一部分:

ReID网络是DeepSORT的主要创新点。通过外观信息,来获取待跟踪的Bounding Boxes的抽象特征,并计算与上一帧的匹配结果Bounding Boxes的余弦距离,和马氏距离,构建代价矩阵。
ReID网络,全称行人ID重识别(Pedestrian Re-identification,ReID),广泛应用在安防,视频监控领域。为同一个人,但是在不同地点,不同姿态下,分配唯一ID的行为。图源:小白入门系列——ReID(一):什么是ReID?如何做ReID?ReID数据集?ReID评测指标? - 知乎

可以理解为主要为了防止跟踪器在跟踪的时候导致大量的目标ID切换问题。可以认为ReID是一种特征提取网络。整个模型的网络结构如下,可以看成是一个层数比较少的特征提取网络。(手工绘图,转载以及使用注明图片来源)

在目标跟踪的流程是,对检测到的每个Bounding Boxes的位置,去原始的图片中,截取对应的目标方框图,然后放入到Re-ID网络中,由于已经加载好了预先训练好的权重,所有,放入这个Re-ID网络后,进行前向推理后,经过embedding后,获得对应的每个Bounding Boxes的特征向量,也就是对应着每个Bounding Boxes的外观信息。
3.1使用Detection类封装经过Re-ID网络后的特征
bbox_tlwh = self._xywh_to_tlwh(bbox_xywh)#转换bbox的格式
#下面这个confidences={Tensor:(2,4)},第0维表示检测到几个box,并且这个置信度要大于设定的阈值
'''detections保存了所有的box的信息,每个Detection对象包含了满足阈值的目标置信度,box的特征向量,tlwh的box坐标'''
detections = [Detection(bbox_tlwh[i], conf, features[i]) for i, conf in enumerate(confidences) if
conf > cfg.min_confidence]
#应用非极大值抑制
boxes = np.array([d.tlwh for d in detections])#格式为tlwh的所有目标的box坐标信息
scores = np.array([d.confidence for d in detections])#格式为单个float数的所有box的目标置信度信息
indices = non_max_suppression(boxes, cfg.nms_max_overlap, scores) #返回经过NMS剩下boxes的索引
detections = [detections[i] for i in indices] #只选取nms过后的索引的detections
接下来的步骤,主要使用一个名为Detection的类,将对应的特征向量集合和置信度集合,以及坐标,封装成Detection的数组,命名为detectioons。并再一次应用非极大值抑制算法。过滤一些detection。非极大值抑制的函数。
indices = non_max_suppression(boxes,cfg.nms_max_ouverlap,scores)#进行nms算法
非极大值抑制(No-maximum supprision,NMS),参考另一篇博文:
吉吉锅锅爱地球:NMS详解(代码)非极大值抑制(Non Maximum Suppression)1 赞同 · 0 评论文章正在上传…重新上传取消
4.基于卡尔曼滤波的先验状态估计用于跟踪预测
陈述的是这一部分:
下面将详细讲解卡尔曼滤波的意义。
4.1什么是卡尔曼滤波
卡尔曼滤波(Kalman Filter)是一个优化自回归数据的处理算法,是现代控制理论的一种经典算法,能够在系统存在许多不确定的情况下,通过之前的信息,来估计系统的状态。广泛应用在关于时间序列的分析领域中。
先给出卡尔曼滤波的通用表达式。
卡尔曼滤波的预测式的通用表达式为:

卡尔曼滤波预测的一般通用表达式
其中, xt 表示系统在 t 时刻系统状态的均值向量, Ak 表示k时刻的状态转移矩阵, Pk 表示k时刻的协方差矩阵, Qk,Bku→k 表示系统在k时刻的噪声矩阵。带 ~ 表示预测的估计矢量。
卡尔曼滤波的更新式的通用表达式为:

卡尔曼滤波更新的一般通用表达式
其中, z→k 表示k时刻所测量到的均值向量, K 表示卡尔曼增益, H 表示从预测空间转换到检测空间的转移矩阵。
简单来说:系统估计/预测出一个结果,现实测量出一个结果。这俩都不对,两个数据根据稳定性加权,得到一个数值,认为这个加权算出来的这个最对。
案例:对一条直线上行驶的一个小车(看作质点)的状态进行估计,假设无外力作用,即保持初速度持续不断的运动。假设马尔科夫性,即当前时刻状态x(t)只与上一时刻小车的状态x(t−1)有关,给出一个递推方程x(t)=Ax(t−1)。理论上可以通过这个方程求出任意时刻的状态,但是事实上会受到不确定因素的影响。
我们假设每个状态分量受到的不确定因素(噪声)的整体服从正态分布,那么在t0时刻,小车的状态分量也就服从正态分布,现在对小车进行状态估计。
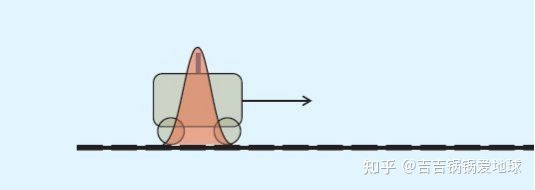
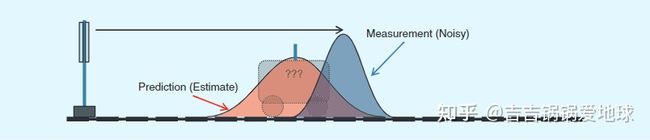
小车是一个质点,他的状态(位置,速度等)的初始值也是一个不确定的值,符合一个高斯分布,如图所示。
我们的目的是要通过状态转移矩阵A来估计小车在t1时刻的状态。
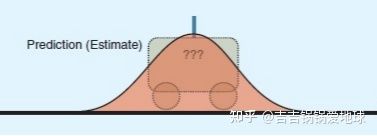
可以看到小车的状态分布变宽了,因为不确定因素增加了。
状态转移矩阵是指小车从t0的状态变到t1状态的转移过程矩阵。这时为了避免不确定度带来的过大的偏差,我们在t1时刻测量一次小车的位置和速度信息,如下图深色分布:
由于测试的小车的位置和速度也是一个大概的值(估计值 ),也包含了一定的误差,所以也是一个符合高斯分布的。
由于测量值也是一个大概的值,不是完完全全的精确值,由于车辆遇到沟壑,以及速度的突变不符合状态转移矩阵,导致测量值也不太准。这个时候到底是选取哪一个值呢?是橙色的估计值,还是蓝灰色的测量值呢?这就涉及到卡尔曼滤波的卡尔曼增益 K 。用来衡量两者的权重。
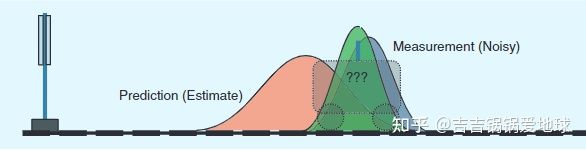
绿色区域是估计值和测量值融合后的结果。两者相交的部分的横坐标就是卡尔曼增益
此外,由于小车状态的各个变量之间,不是独立的,比如小车的速度和当前位置就是具有一定关系的:速度大,在相同时间内,位置就变化大,速度小,在相同时间内,位置变化就小。而协方差恰好来表示多个变量之间的相关性简而言之,矩阵中的每个元素 Σij 表示第 i 个和第 j 个状态变量之间的相关度。可以很明显的发现,协方差是一个对称矩阵,交换协方差的i和j,协方差是不变的。
因此,在每个时刻我们都需要估计小车的两个值,均值向量和协方差矩阵。
我们首先引入一个物理中的运动学公式来表达小车的状态变化过程。
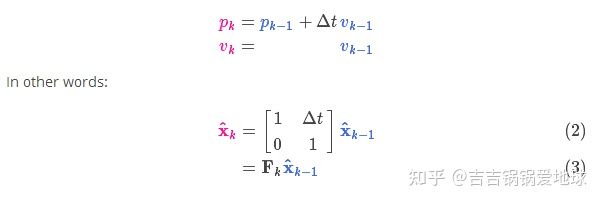
这里的P是位置,V是速度,可以看出是一个匀速运动模型。
小车是匀速运动的,所以有速度 Vk=Vk−1 。整理后可以表达为(3)式。和卡尔曼滤波的预测式相同(这里暂时不考虑噪声 Bku→k 。)
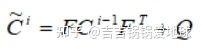
那么协方差矩阵呢?尝试在协方差 Pk−1 的每个元素上×一个矩阵A,那么这个协方差就会变成:

注:协方差回顾: https://blog.csdn.net/hustqb/article/details/90264432
结合(3)式和(4)式,得:

如果系统包含了外部控制,比如小车并不是匀速运动的,内部可以加油门。因此,假设小车符合匀加速直线运动,则运动学公式为:

用矩阵形式表达为:

这是存在可控的内部作用情况下的情形,如果有存在不可控的外部变量。即未知变量的干扰,那么上述(6)式和(5)式子,可以表达为下式:

这就是卡尔曼滤波的预测式。
注意:
卡尔曼滤波利用了两个高斯分布相乘,相加依旧是高斯分布这一特性。
卡尔曼滤波其实是贝叶斯后验估计的另一表达形式
4.2DeepSORT中的卡尔曼滤波预测式
在卡尔曼滤波的一般表达式中,忽略均值向量的后面部分(因为是匀速模型)。所以上面的卡尔曼滤波的预测表达式变为:
x~=Akxk−1P~=AkPk−1AkT+Q
将这个卡尔曼滤波的预测的通用表达式应用到目标跟踪(目标跟踪的卡尔曼滤波是匀速卡尔曼滤波模型)中,用如下式子表达。
![]()
也可以展开为:

可以看到这是一个匀速运动的卡尔曼滤波模型。
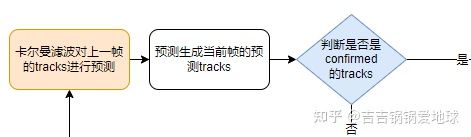
在代码里的具体体现如下,这个函数是用来对上一帧的跟踪Track进行预测,预测出当前的跟踪Track。
代码片段
#这句代码位于DeepSORT类对象里
self.tracker.predict()#track预测
这个函数里面的内容如下:
#这是跟踪Tracker类对象的方法
def predict(self):
"""
向前传播跟踪状态分布
这个函数应该每个step都被调用一次,在update()之前
"""
#对每一条track使用卡尔曼滤波的predict
for track in self.tracks:
track.predict(self.kf)
其中,对每个track,执行一次卡尔曼滤波预测。对应track.predict(self.kf)里面的代码如下:
#这是Track跟踪的代码,Track通常翻译成跟踪,或者轨迹
def predict(self, kf):
"""
使用卡尔曼滤波器预测step,将状态分布传播到当前step。
使用卡尔曼滤波的predict方法对每条track进行状态(8x8矩阵的均值和协方差)预测,
基于上一时刻的状态对当前时刻的状态和不确定性进行预测。(根据线性运动学方程进行预测
mean(u,v,y,h,x1,y1,y~,h~),x=vt,预测不确定性covariance)
Parameters
----------
kf : kalman_filter.KalmanFilter
卡尔曼滤波器
"""
#根据上一时刻的track状态预测出来当前时刻的均值和协方差计算
self.mean, self.covariance = kf.predict(self.mean, self.covariance)
#这个track每次predict时就将age+1,年龄越大的tracks越晚被跟踪。
self.age += 1
self.time_since_update += 1
卡尔曼滤波,主要是根据上一时刻的track状态(均值和协方差)预测出当前时刻的均值和协方差。
其中kf.predict()内容如下,这是卡尔曼滤波预测式的主要部分。
def predict(self, mean, covariance):
"""
运行卡尔曼滤波预测步骤,计算(8x8的矩阵和协方差)
Parameters
----------
mean : ndarray:(8,)
上一时刻的track的后验估计均值,一个8维均值向量
covariance : ndarray:(8x8)
上一时刻的track的后验估计协方差,8x8的协方差矩阵
Returns
-------
(ndarray, ndarray)
返回预测状态的均值向量和协方差矩阵。 未观察到的速度被初始化为 0 均值。
"""
std_pos = [ #位置
self._std_weight_position * mean[3],
self._std_weight_position * mean[3],
1e-2,
self._std_weight_position * mean[3]]
std_vel = [ #速度
self._std_weight_velocity * mean[3],
self._std_weight_velocity * mean[3],
1e-5,
self._std_weight_velocity * mean[3]]
#初始化噪声矩阵Q
motion_cov = np.diag(np.square(np.r_[std_pos, std_vel]))
#均值更新式和协方差更新式,M' = FM
mean = np.dot(self._motion_mat, mean)
#C'=FCF^T+Q
covariance = np.linalg.multi_dot((
self._motion_mat, covariance, self._motion_mat.T)) + motion_cov
return mean, covariance
关于跟踪tracks的Track对象,是一个Track类,每个Track的初始化函数如下。关于参数的介绍也在里面。
class Track:
"""
一个目标跟踪track,状态空间向量为(x,y,a,h),关联着它们的速度信息
Parameters
----------
n_init : int
track被confirmed前的连续detections的数量,如果在开始的n_init帧内发生miss,
则track的状态就会被设置为Deleted
max_age : int
track状态被设置为Deleted之前的最大连续miss次数。
mean : ndarray
初始状态分布的均值向量
covariance : ndarray
初始状态分布的协方差矩阵
track_id : int
track分配的唯一ID
hits : int
测量更新的总数
age : int
第一次发生以来的总帧数
time_since_update : int
自上次测量更新以来的总帧数。
state : TrackState
目前的track状态.
features : List[ndarray]
特征缓存。 在每次测量更新时,相关的特征向量都会添加到此列表中。
"""
def __init__(self, mean, covariance, track_id, n_init, max_age,class_id,
feature=None):
self.mean = mean #均值
self.covariance = covariance #协方差
self.track_id = track_id #track的id
self.class_id = class_id
#===========初始化类别字典================
self.classes = {}
#hits代表匹配了多少次,成功连续匹配次数达到_n_init=3时才会将将状态设置为confirmed
self.hits = 1
self.age = 1 #age越大则越晚被跟踪,每次调用卡尔曼滤波预测时候就会+1
#每次调用卡尔曼滤波预测时候就会+1,每次调动update的时候就会重置为0,意思就是每次成功匹配时,重置为0,否则+1
self.time_since_update = 0
self.state = TrackState.Tentative
#每个track对应多个features,每次update都将最新的features添加到列表里
self.features = []
if feature is not None:
self.features.append(feature)
self._n_init = n_init
self._max_age = max_age #最大存活期限
5.基于外观信息和IOU的级联匹配
陈述的是这一部分:

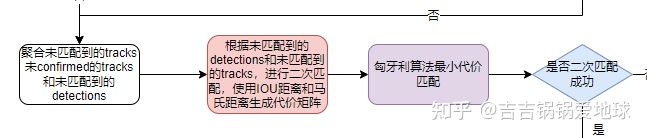
由于基于外观信息和IOU的匹配都用到了匈牙利算法求解最小代价分配问题,因此,首先简单介绍一下匈牙利算法。
5.1基于匈牙利算法求解最小代价分配问题
是库恩(W.W.Kuhn)在1955年构造的一个关于在多项式时间里,求解两个结合的二分图分配问题的一种算法。利用了匈牙利数学家康尼格(D.Konig)的定理求解了这个问题:
通常用于求解最小代价分配问题。直接说人话,案例讲解:
假设有如下一个实际问题。这里有n份工作任务,有n个工人,每个工人完成工作所需的成本不同(可以时间成本,可以是经济成本),但是由于每个工人在同一时间只能做一个工作,每个工作因此只能分配给一个工人,需要给出一个算法,求出总的花费成本最低。
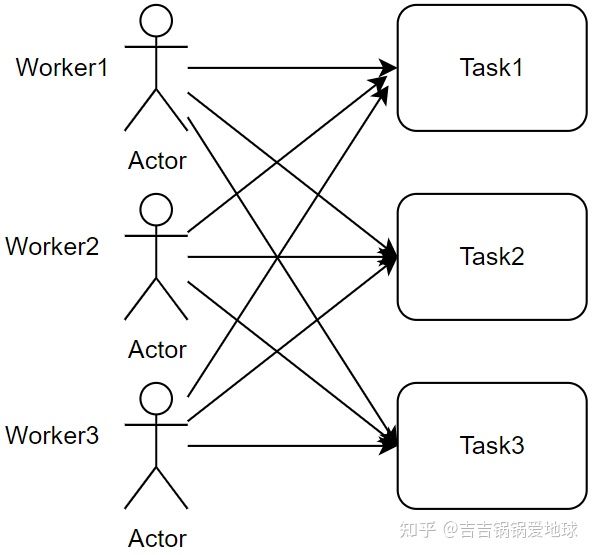
绿色的线表示整体最小代价分配的方案。用一个表格,或者说矩阵表示为:
| Task1 | Task2 | Task2 | |
|---|---|---|---|
| Worker1 | 10 | 15 | 19 |
| Worker2 | 9 | 18 | 5 |
| Worker3 | 6 | 14 | 3 |
那么上面这个表格或者说是矩阵,的第(i,j)个元素的值就对应着第i个工人分配给他第j个任务的成本。因此上面这个矩阵也就称为代价矩阵。
D. F. Crouse, "On implementing 2D rectangular assignment algorithms," in IEEE Transactions on Aerospace and Electronic Systems, vol. 52, no. 4, pp. 1679-1696, August 2016, doi: 10.1109/TAES.2016.140952.
算法流程如下:
0.创建一个称为代价矩阵cost matrix的nxm矩阵,如果m!=n那么进行矩阵填充(填充原矩阵的最大元素即可)。让行数=列数。并令k=min(n,m)。比如:
这里的k=3.
(1015991856143)
1.对于这个矩阵的每一行,找到最小的元素,然后从这一行的每个元素减去这个最小的元素。
(16041303110)
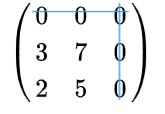
2.对于这个矩阵的每一列,找到最小的元素,然后从这一列的每个元素减去这个最小的元素。
(000370250)
3.对于这个矩阵,用数量最小的直线覆盖所有的0元素,如果线段数量=K那么,就找到了这样的最优分配。
否则,找到没有被直线覆盖的元素中的最小的一个值,让每个没有完全被直线覆盖的元素行中的元素-这个值,让每个完全被直线覆盖了的列的元素+这个值。然后重复执行步骤3。
两条直线覆盖了所有0元素,然后用每个没有被直线完全覆盖的行减去最小元素2

然后让每个完全被直线覆盖的列加上最小元素2,然后添加新的直线

现在直线数量=3了,所以停止。
4.找到最优分配的过程可以表述为。依次找到只有一个0的元素,取出行和列。

取出了第2行3列的元素,并重新构建矩阵

第二次选出第3行,第1列的元素。
所以,上述的代价矩阵的最优分配矩阵为:
| Task1 | Task2 | Task3 | |
|---|---|---|---|
| Worker1 | 15 | ||
| Worker2 | 5 | ||
| Worker3 | 6 |
这就是匈牙利算法的解释。当然,我们只需要了解这个算法是干嘛的就行。
在目标跟踪中,当前帧的检测器会生成Bounding Boxes的坐标位置和类别信息,而上一帧的跟踪器会进行预测生成Bounding Boxes的坐标和位置信息。两者如何一一配对呢?这就用到了之前的匈牙利匹配算法。
比如生成了一个有关于检测器Detections和跟踪器Tracks的代价矩阵。
| Track1 | Track2 | Track3 | Track4 | |
|---|---|---|---|---|
| Detection1 | 21 | 10 | 0 | 90 |
| Detection2 | 56 | 62 | 11 | 90 |
| Detection3 | 20 | 77 | 90 | 90 |
| Detection4 | 10 | 80 | 20 | 90 |
其中这里面的元素都是通过距离计算处理出来的,具体有余弦距离,欧氏距离和IOU距离,前两个用于第一次匹配,IOU距离用于第二次匹配。
def gated_metric(tracks, dets, track_indices, detection_indices):
'''
根据外观信息和马氏距离,计算卡尔曼滤波预测到的tracks和当前时刻检测到的
detections的代价矩阵
'''
features = np.array([dets[i].feature for i in detection_indices])
targets = np.array([tracks[i].track_id for i in track_indices])
#基于外观信息,计算tracks和detections的余弦距离代价矩阵
cost_matrix = self.metric.distance(features, targets)
#基于马氏距离,过滤掉代价矩阵中的一些不合理的项,将其设置为一个较大的值
cost_matrix = linear_assignment.gate_cost_matrix(
self.kf, cost_matrix, tracks, dets, track_indices,
detection_indices)
return cost_matrix
上述代码用来根据指定的方式(余弦距离,欧式距离,IOU距离),计算用于匈牙利算法的代价矩阵,然后利用马马氏距离修正。其中的features是经过re-ID后的Bounding Boxes的特征向量,包含了类别信息。track_id是对应根据上一帧预测到当前帧的跟踪Tracks。
5.2距离度量——欧几里得距离,余弦距离,马氏距离,IOU距离介绍
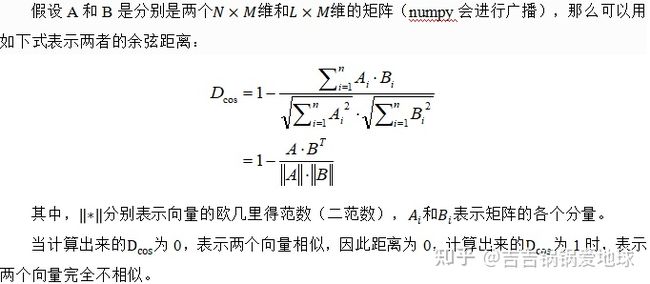
1.余弦距离
余弦距离实际上是指两个向量之间的距离,严格意义上来说,余弦距离是指的两个向量在空间中的相似度。
Nguyen H V, Bai L. Cosine similarity metric learning for face verification[C]//Asian conference on computer vision. Springer, Berlin, Heidelberg, 2010: 709-720.
Hieu V. Nguyen 和Li Bai 在使用了余弦相似度来进行人脸的特征向量的匹配。因此使用余弦距离对tracks和detections的结果进行度量,是一种合理且常用的方法。余弦距离只关注两个向量的方向的差异性,而对向量的长度不敏感。余弦相似度的范围为[-1,1],当两个向量完全相似的时候,其余弦相似度为1。而余弦距离表示为1-余弦相似度。
2.欧式距离,欧几里得距离(Euclidean距离)
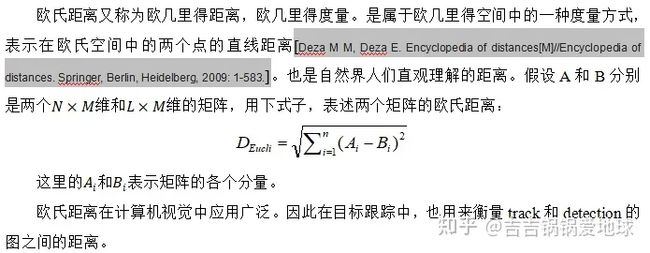
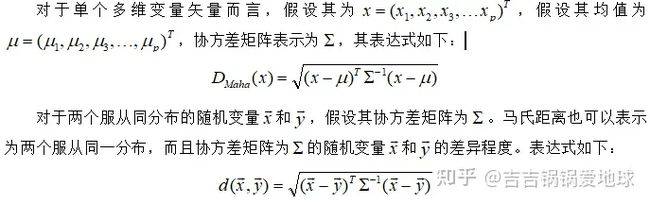
3.Mahalanobis距离,马氏距离,马哈拉诺比斯距离
马氏距离由印度统计学家P. C. Mahalanobis提出,是修正的欧几里得距离,所以,通常情况下,可以看作是欧氏距离的一种修正方案,是一种有效的计算两个位置样本集合的相似度的方法,欧式距离不考虑在多维空间下维度之间的关系,而马氏距离则考虑到了各个特性之间的联系。并且独立于尺度的,也就是说马氏距离与度量尺度无关。
De Maesschalck R, Jouan-Rimbaud D, Massart D L. The mahalanobis distance[J]. Chemometrics and intelligent laboratory systems, 2000, 50(1): 1-18.
可以看出,马氏距离和欧式距离很接近,诚然,当协方差矩阵为一单位矩阵的时候,马氏距离退化为欧氏距离,马氏距离有如下优点:
1)马氏距离不受量纲的影响,两个样本之间的距离与量纲无关,与测量出的样本单位无关,与数据是否已经被标准化或中心化是无关的。
2)马氏距离,考虑了样本之间的关联关系,排除了多个变量之间的相关性对结果的干扰。
在目标跟踪中,使用马氏距离的同时考虑了外观和运动的信息。这种匹配的方式考虑了状态的不确定的程度。通常利用自由度为4的卡方分布的分位值作为其阈值,用来排除不可能的关联。
马氏距离的代码解析可以见链接,余弦距离和欧式距离比较简单就不贴了。
吉吉锅锅爱地球:DeepSORT中的马氏距离(马哈拉诺比斯距离Mahalanobis Distance) 代码讲解13 赞同 · 4 评论文章正在上传…重新上传取消
4.IOU距离
从IOU距离的名字就可以看出(Intersection Over Union,交并比)。通过这个名字我们可以大体上看得出IOU的意思。也就是两个Bounding Boxes的交集/并集的面积。而IOU距离则表示为:1-IOU距离
如图所示,带表两个Boundinx Boxes的面积交集 比 两个Bounding Boxes的面积并集。衡量的是两个Bounding Boxes的重合程度。(值越大,重合度越高,值越低重合度越低)

所以对应的IOU距离则表示,两个Bounding Boxes相距越近,IOU距离越小,两个Bounding Boxes相距越远,IOU距离越大。
def iou(bbox, candidates):
"""
计算一个bbox和candidates的交并比
Parameters
----------
bbox : ndarray
一个bounding boxes,格式为(top left x, top left y, width, height).
candidates : ndarray
一个ndarray的矩阵,每行的坐标格式为(top left x, top left y, width, height).
Returns
-------
ndarray
在bbox和每个candidate的交集,位于[0,1]
这个值较大的话意味着bbox的大部分都被candidate遮挡了
"""
bbox_tl, bbox_br = bbox[:2], bbox[:2] + bbox[2:] #获得左上点和右下点的坐标
candidates_tl = candidates[:, :2] #获得候选bbox的左上点
candidates_br = candidates[:, :2] + candidates[:, 2:] #获得候选bbox的右下点
tl = np.c_[np.maximum(bbox_tl[0], candidates_tl[:, 0])[:, np.newaxis], #获得两个bbox相交的左上点
np.maximum(bbox_tl[1], candidates_tl[:, 1])[:, np.newaxis]]
br = np.c_[np.minimum(bbox_br[0], candidates_br[:, 0])[:, np.newaxis], #获得两个bbox相交的右下点
np.minimum(bbox_br[1], candidates_br[:, 1])[:, np.newaxis]]
wh = np.maximum(0., br - tl) #右下-左上=bbox相交部分的长宽
area_intersection = wh.prod(axis=1) #在axix=1处计算所有元素的乘积,因为所有的box和candidates都是多个,返回对应bbox相交面积
area_bbox = bbox[2:].prod() #计算bbox的面积
area_candidates = candidates[:, 2:].prod(axis=1) #计算candidates的面积
return area_intersection / (area_bbox + area_candidates - area_intersection) #返回交并比
def iou_cost(tracks, detections, track_indices=None,
detection_indices=None):
if track_indices is None: #判空处理
track_indices = np.arange(len(tracks))
if detection_indices is None: #判空处理
detection_indices = np.arange(len(detections))
#先创建一个空的代价矩阵cost matrix
cost_matrix = np.zeros((len(track_indices), len(detection_indices)))
for row, track_idx in enumerate(track_indices): #逐个元素赋值
if tracks[track_idx].time_since_update > 1: #只对time_since_update=0进行IOU赋值,其他的赋一个极大值
cost_matrix[row, :] = linear_assignment.INFTY_COST
continue
bbox = tracks[track_idx].to_tlwh() #bbox坐标转换从 tlah->tlwh
candidates = np.asarray([detections[i].tlwh for i in detection_indices]) #从detections中获得candidates
cost_matrix[row, :] = 1. - iou(bbox, candidates) #计算IOU距离,并赋到代价矩阵里
return cost_matrix
6.基于卡尔曼滤波后验状态估计用于检测更新
在4.1节中,展示了卡尔曼滤波的两个式子,分别是卡曼滤波的预测式,卡尔曼滤波的更新式。
其中卡尔曼滤波的更新式为:

其中, z→k 表示k时刻所测量到的均值向量, K 表示卡尔曼增益, H 表示从预测空间转换到检测空间的转移矩阵。
这一段代码中,计算并返回卡尔曼滤波更新式的 Hix~i 和 HiP~iHiT+R
def project(self, mean, covariance):
"""
将均值和协方差的状态分布矩阵/向量投影到测量/检测空间
mean : ndarray 状态均值向量,8维数组
covariance : ndarray 状态协方差矩阵(8x8维).
"""
std = [
self._std_weight_position * mean[3],
self._std_weight_position * mean[3],
1e-1,
self._std_weight_position * mean[3]]
# 初始化噪声矩阵R,4x4对角矩阵,对角线上值分别为中心点xy和ah的噪声
innovation_cov = np.diag(np.square(std))
# 将均值向量映射到detection空间,即Hx'
mean = np.dot(self._update_mat, mean)
#将协方差矩阵映射到检测空间,即HP'H^T
covariance = np.linalg.multi_dot((
self._update_mat, covariance, self._update_mat.T))
#返回Hx',HP'H^+R,
return mean, covariance + innovation_cov
下面是卡尔曼滤波的更新代码,这里使用了Cholesky分解来简化计算。
def update(self, mean, covariance, measurement):
"""
卡尔曼滤波更新步骤
Parameters
----------
mean : ndarray
预测的状态均值向量 (8 dimensional).
covariance : ndarray
预测的状态协方差矩阵 (8x8 dimensional).
measurement : ndarray
4维度的测量向量(x, y, a, h)
Returns
-------
(ndarray, ndarray)
Returns the measurement-corrected state distribution.
"""
#将mean和covariance映射到检测空间,获得Hx'和HP'H^+R
projected_mean, projected_cov = self.project(mean, covariance)
#cholesky分解
chol_factor, lower = scipy.linalg.cho_factor(
projected_cov, lower=True, check_finite=False)
#卡尔曼增益计算K
kalman_gain = scipy.linalg.cho_solve(
(chol_factor, lower), np.dot(covariance, self._update_mat.T).T,
check_finite=False).T
#得到测量值的映射结果y=z-Hx',z是检测结果
innovation = measurement - projected_mean
#均值更新式x = x'+Ky = x'+K(z-Hx')
new_mean = mean + np.dot(innovation, kalman_gain.T)
#协方差更新式P = (I-KH)P',代码是P=P'-KSK^T
new_covariance = covariance - np.linalg.multi_dot((
kalman_gain, projected_cov, kalman_gain.T))
return new_mean, new_covariance
因为内容较多,持续更新中,有不懂的或者个人理解有问题的,欢迎留言探讨