动手学深度学习(二十二)——GoogLeNet:CNN经典模型(五)
文章目录
-
- 1. 含并行连结的网络(GoogLeNet)
-
- 1.1 Inception块
- 1.2 GoogLeNet模型
- 2. 动手实现简化的GoogLeNet模型
-
- 2.1 实现Inception块
- 2.2 构建GoogleNet模型
- 2.3 验证网络架构
- 2.4 训练网络
- 2.5 绘图查看效果
- 3. 总结
1. 含并行连结的网络(GoogLeNet)
在2014年的ImageNet图像识别挑战赛中,一个名叫GoogLeNet Szegedy.Liu.Jia.ea.2015 的网络结构大放异彩。GoogLeNet吸收了NiN中串联网络的思想,并在此基础上做了改进。
这篇论文的一个重点是解决了什么样大小的卷积核最合适的问题。毕竟,以前流行的网络使用小到 1 × 1 1 \times 1 1×1 ,大到 11 × 11 11 \times 11 11×11 的卷积核。本文的一个观点是,有时使用不同大小的卷积核组合是有利的。
在本节中,我们将介绍一个稍微简化的GoogLeNet版本:我们省略了一些为稳定训练而添加的特殊特性,但是现在有了更好的训练算法,这些特性不是必要的。
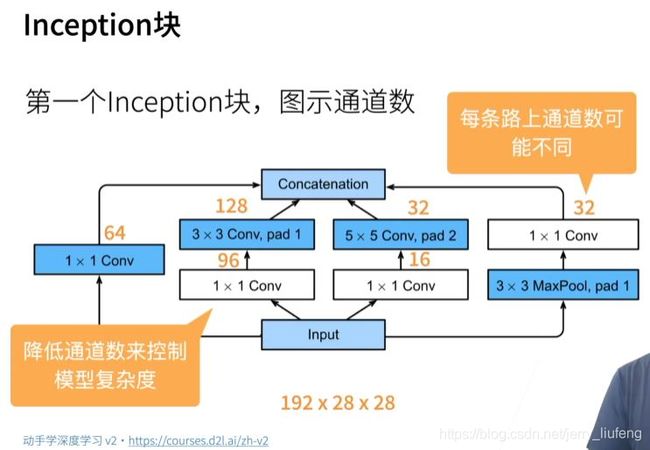
1.1 Inception块
在GoogLeNet中,基本的卷积块被称为Inception块(Inception block)。这很可能得名于电影《盗梦空间》(Inception),因为电影中的一句话“我们需要走得更深”(“We need to go deeper”)。
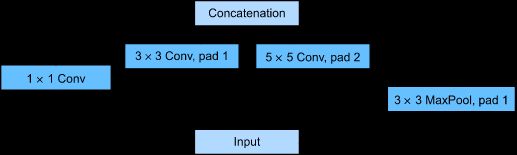
如上图所示,Inception块由四条并行路径组成。前三条路径使用窗口大小为 1 × 1 1\times 1 1×1、 3 × 3 3\times 3 3×3 和 5 × 5 5\times 5 5×5 的卷积层,从不同空间大小中提取信息。中间的两条路径在输入上执行 1 × 1 1\times 1 1×1 卷积,以减少通道数,从而降低模型的复杂性。第四条路径使用 3 × 3 3\times 3 3×3 最大池化层,然后使用 1 × 1 1\times 1 1×1 卷积层来改变通道数。这四条路径都使用合适的填充来使输入与输出的高和宽一致,最后我们将每条线路的输出在通道维度上连结,并构成Inception块的输出。在Inception块中,通常调整的超参数是每层输出通道的数量。
【为什么使用inception块?】
跟 3 × 3 3 \times 3 3×3 和 5 × 5 5 \times 5 5×5的卷积层比起来,inception块有更少的参数个数和计算复杂度
1.2 GoogLeNet模型
GoogLeNet 一共使用 9 个Inception块和全局平均池化层的堆叠来生成其估计值。Inception块之间的最大池化层可降低维度。第一个模块类似于 AlexNet 和 LeNet,Inception块的栈从VGG继承,全局平均池化层避免了在最后使用全连接层。

2. 动手实现简化的GoogLeNet模型
2.1 实现Inception块
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
class Inception(nn.Module):
def __init__(self,in_channels,c1,c2,c3,c4,**kwargs):
super(Inception,self).__init__(**kwargs)
# 线路1,单1 x 1卷积层
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3 x 3最大池化层后接1 x 1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)
def forward(self,x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
# 在通道维度上连结输出
return torch.cat((p1, p2, p3, p4), dim=1)
2.2 构建GoogleNet模型
(1)第一个模块使用
64 个通道、 7 × 7 7\times 7 7×7 卷积层。
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(), nn.MaxPool2d(kernel_size=3, stride=2,
padding=1))
(2)第二个模块使用两个卷积层:
第一个卷积层是 64个通道、 1 × 1 1\times 1 1×1 卷积层;第二个卷积层使用将通道数量增加三倍的 3 × 3 3\times 3 3×3 卷积层。这对应于 Inception 块中的第二条路径。
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1), nn.ReLU(),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
(3)第三个模块串联两个完整的Inception块。
第一个 Inception 块的输出通道数为 64 + 128 + 32 + 32 = 256 64+128+32+32=256 64+128+32+32=256,四个路径之间的输出通道数量比为 64 : 128 : 32 : 32 = 2 : 4 : 1 : 1 64:128:32:32=2:4:1:1 64:128:32:32=2:4:1:1。
第二个和第三个路径首先将输入通道的数量分别减少到 96 / 192 = 1 / 2 96/192=1/2 96/192=1/2 和 16 / 192 = 1 / 12 16/192=1/12 16/192=1/12,然后连接第二个卷积层。第二个 Inception 块的输出通道数增加到 128 + 192 + 96 + 64 = 480 128+192+96+64=480 128+192+96+64=480,四个路径之间的输出通道数量比为 128 : 192 : 96 : 64 = 4 : 6 : 3 : 2 128:192:96:64 = 4:6:3:2 128:192:96:64=4:6:3:2。
第二条和第三条路径首先将输入通道的数量分别减少到 128 / 256 = 1 / 2 128/256=1/2 128/256=1/2 和 32 / 256 = 1 / 8 32/256=1/8 32/256=1/8。
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
(4)第四模块更加复杂,它串联了5个Inception块
其输出通道数分别是 192 + 208 + 48 + 64 = 512 192+208+48+64=512 192+208+48+64=512 、 160 + 224 + 64 + 64 = 512 160+224+64+64=512 160+224+64+64=512 、 128 + 256 + 64 + 64 = 512 128+256+64+64=512 128+256+64+64=512 、 112 + 288 + 64 + 64 = 528 112+288+64+64=528 112+288+64+64=528 和 256 + 320 + 128 + 128 = 832 256+320+128+128=832 256+320+128+128=832 。
这些路径的通道数分配和第三模块中的类似,首先是含 3 × 3 3×3 3×3 卷积层的第二条路径输出最多通道,其次是仅含 1 × 1 1×1 1×1 卷积层的第一条路径,之后是含 5 × 5 5×5 5×5 卷积层的第三条路径和含 3 × 3 3×3 3×3 最大池化层的第四条路径。
其中第二、第三条路径都会先按比例减小通道数。
这些比例在各个 Inception 块中都略有不同。
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
(5)第五模块
包含输出通道数为 256 + 320 + 128 + 128 = 832 256+320+128+128=832 256+320+128+128=832 和 384 + 384 + 128 + 128 = 1024 384+384+128+128=1024 384+384+128+128=1024 的两个Inception块。
其中每条路径通道数的分配思路和第三、第四模块中的一致,只是在具体数值上有所不同。
需要注意的是,第五模块的后面紧跟输出层,该模块同 NiN 一样使用全局平均池化层,将每个通道的高和宽变成1。
最后我们将输出变成二维数组,再接上一个输出个数为标签类别数的全连接层。
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
nn.AdaptiveAvgPool2d((1, 1)), nn.Flatten())
net = nn.Sequential(b1, b2, b3, b4, b5, nn.Linear(1024, 10))
2.3 验证网络架构
GoogLeNet 模型的计算复杂,而且不如 VGG 那样便于修改通道数。
[为了使Fashion-MNIST上的训练短小精悍,我们将输入的高和宽从224降到96],这简化了计算。下面演示各个模块输出的形状变化。
X = torch.rand(size=(1, 1, 96, 96))
for layer in net:
X = layer(X)
print(layer.__class__.__name__, 'output shape:\t', X.shape)
Sequential output shape: torch.Size([1, 64, 24, 24])
Sequential output shape: torch.Size([1, 192, 12, 12])
Sequential output shape: torch.Size([1, 480, 6, 6])
Sequential output shape: torch.Size([1, 832, 3, 3])
Sequential output shape: torch.Size([1, 1024])
Linear output shape: torch.Size([1, 10])
2.4 训练网络
# 读取数据
from torchvision import transforms
import torchvision
from torch.utils import data
batch_size = 256
def get_dataloader_workers():
"""使用四个进程读取数据"""
return 4
def load_data_fashion_mnist(batch_size,resize=None):
"""下载Fashion-MNIST数据集,并将其保存至内存中"""
trans = [transforms.ToTensor()]
if resize:
trans.insert(0,transforms.Resize(resize)) # transforms.Resize将图片最小的一条边缩放到指定大小,另一边缩放对应比例
trans = transforms.Compose(trans) # compose用于串联多个操作
mnist_train = torchvision.datasets.FashionMNIST(root="./data",
train=True,
transform=trans,
download=True)
mnist_test = torchvision.datasets.FashionMNIST(root="./data",
train=False,
transform=trans,
download=True)
return (data.DataLoader(mnist_train,batch_size,shuffle=True,
num_workers=get_dataloader_workers()),
data.DataLoader(mnist_test,batch_size,shuffle=True,
num_workers = get_dataloader_workers()))
def evaluate_accuracy_gpu(net, data_iter, device=None): #@save
"""使用GPU计算模型在数据集上的精度。"""
if isinstance(net, torch.nn.Module):
net.eval() # 设置为评估模式
if not device:
device = next(iter(net.parameters())).device
# 正确预测的数量,总预测的数量
metric = d2l.Accumulator(2)
for X, y in data_iter:
if isinstance(X, list):
# BERT微调所需的(之后将介绍)
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
#@save
def train(net, train_iter, test_iter, num_epochs, lr, device):
"""用GPU训练模型"""
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print('training on', device)
net.to(device) # 将网络挪到gpu上
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
# 训练损失之和,训练准确率之和,范例数
metric = d2l.Accumulator(3)
net.train()
for i, (X, y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')
lr, num_epochs, batch_size = 0.1, 10, 128
train_iter, test_iter = load_data_fashion_mnist(batch_size, resize=96)
train(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
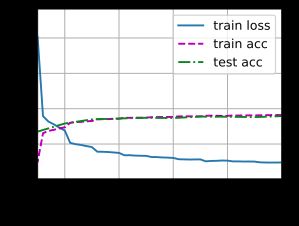
loss 0.239, train acc 0.909, test acc 0.895
655.4 examples/sec on cuda:0
2.5 绘图查看效果
import matplotlib.pyplot as plt
# 验证数据
def predict(net, test_iter, n=6): #@save
"""预测标签"""
for X, y in test_iter:
break
trues = d2l.get_fashion_mnist_labels(y)
device = torch.device('cuda:0')
X_gpu = X.to(device)
preds = d2l.get_fashion_mnist_labels(net(X_gpu).argmax(axis=1))
titles = [true + '\n' + pred for true, pred in zip(trues, preds)]
# 绘图
fig, ax = plt.subplots(
nrows=3,
ncols=4,
sharex=True,
sharey=True,
)
ax = ax.flatten()
for i in range(12):
# 只查看了前面12张图片
img = X[i].reshape(96,96)
ax[i].imshow(img)
ax[i].set(title=titles[i])
ax[0].set_xticks([])
ax[0].set_yticks([])
plt.tight_layout()
plt.show()
predict(net, test_iter)
3. 总结
- Inception 块相当于一个有4条路径的子网络。它通过不同窗口形状的卷积层和最大池化层来并行抽取信息,并使用 1 × 1 1×1 1×1 卷积层减少每像素级别上的通道维数从而降低模型复杂度。(多种卷积融合,抽取特征的同时减小了模型的复杂度)
- GoogLeNet将多个设计精细的Inception块与其他层(卷积层、全连接层)串联起来。其中Inception块的通道数分配之比是在 ImageNet 数据集上通过大量的实验得来的。(正式开启炼丹师的进阶之路)
- GoogLeNet 和它的后继者们一度是 ImageNet 上最有效的模型之一:它以较低的计算复杂度提供了类似的测试精度。
- 可以看见GoogLeNet在
Fashion-MNIST上的测试精度达到了89%,这个精度是没有VGG网络模型高的,其运行速度相类似。GoogLeNet是第一个深度(并非值存粹的深度)超过100层的网络。
相关链接
[1] 《pytorch学习(二十一)——NiN:CNN经典模型(四)》
[2] 《pytorch学习(二十)——VGG:(2014年ILSVRC竞赛第二名模型)》
[3] 《pytorch学习(十九)——AlexNet:CNN经典网络(二)更深+更大》
[4] 《pytorch学习(十八)——LeNet:CNN经典网络(一)》