图像边缘检测之精确定位
文章目录
- 前言
- 边缘位置定义
- 图像预处理
-
- 1. 边缘区域图像粗定位(模版匹配)
- 2. 边缘y坐标粗定位(水平投影)
- 3. 边缘区域的x坐标定位(leetcode算法应用)
- 计算边缘位置
- 亚像素定位
- 参考文献
前言
现如今,计算机视觉中关于边缘检测已经有许多算子的出现,但对于精密检测往往不能取得较好的效果。

如图所示,需要计算图中黑色部分右侧曲线边缘的位置。虽然黑色部分和灰色部分的灰度值差异较大,但由于图中噪声较多,图像边缘处灰度值变化较为缓和,使用图像滤波会让边缘更加模糊,不利于精确检测。
使用Sobel算子检测效果有大量噪声出现,使用阈值较高的canny算子检测01,会出现关键部分边缘检测不到,使用阈值较低的canny算子检测02,也会出现大量噪声。
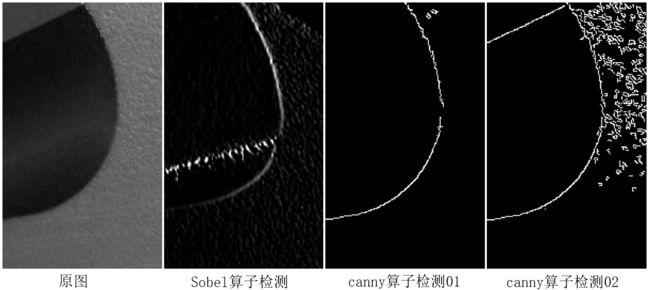
针对这种情况,本文结合博主经历的具体的工业项目,提出一种先粗定位,再提取边缘位置区域,最后精定位的方法,能够精确检测出边缘位置。
边缘位置定义
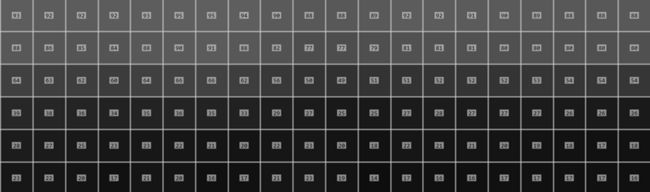
实际的成像系统中,感光元不但接收照射到自身感光面的光,还接收照射到相邻感光元的光,尤其是对边缘点,物体和背景的不同反射特性以及器件的积分效应,造成器件对阶跃边缘的响应产生由明到暗(或由暗到明)的渐变过程,所以边缘在图像中表征为一种灰度分布,如图所示:

通常情况下,我们认为灰度值变化速度最快的地方为边缘位置,可以通过计算像素灰度值的梯度来确定边缘。对于精度要求较高的场景,可以使用曲线拟合的方式,拟合出类似图中连续边缘的曲线,连续边缘曲线上梯度最大处对应的x坐标值即为边缘位置。本文所选的题目是洗衣瓶厂家针对洗衣瓶标签粘贴效果检测提出的,需要检测出洗衣瓶标签粘贴是否有偏移或褶皱的情况。因篇幅问题,仅针对标签上边缘位置检测进行讨论。

图像预处理
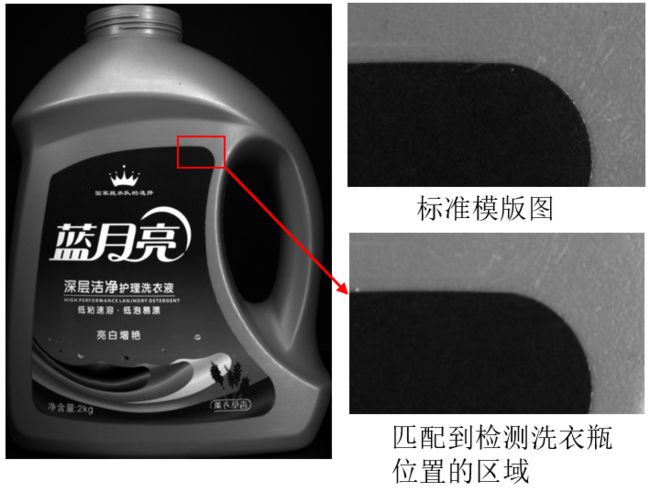
为了计算灰度值变化最快的像素位置,我们需要先定位出能够真实代表标签上边缘的ROI区域,类似于下图尺寸大小的区域,用于计算边缘梯度。
由于标签可能是偏移的,不能通过确定的数值抠出代表标签上边缘区域的图片,因此,我们分为一下3个步骤:
(1)边缘区域图像粗定位;
(2)边缘y坐标粗定位;
(3)边缘区域的x坐标定位。
1. 边缘区域图像粗定位(模版匹配)
使用opencv中模版匹配的方法,与标准图像中的模版进行匹配,效果如下:
关于opencv中模版匹配的原理及代码,网上有大量的说明,这里不再详细介绍。
2. 边缘y坐标粗定位(水平投影)
首先选取合适的阈值,对图像进行二值化。

因数字识别中垂直投影带来的灵感,这里我们将二值化后的黑白图进行水平投影,再从上到下计算每行黑色像素数,当检测到有连续的黑色像素,且长度大于一定值时(避免噪声影响),认为该行是边缘y坐标的大概位置。(因为这里的二值化后图片的边缘并不等同于实际的边缘,因此是y坐标大概的位置)
//二值化
Mat threshRect;
threshold(matchRect, threshRect, 40, 255, THRESH_BINARY);
//水平投影的数组结果
vector<double> v1 = picshadow_y(threshRect, 0.1);
//查找第一次出现黑色像素的行位置 (当 黑色像素数/每行像素数 > 0.05 时,认为是边缘行)
for (int i = 0; i < threshRect.rows; i++) {
if (v1[i] >= 0.05 && y1 == 0) {
y1 = i;
break;
}
}
//对 Mat图像进行水平投影,统计每行的(黑色像素数/每行像素总数),以vector的形式返回
vector<double> picshadow_y(Mat binary, double ratio) {
vector<double> v;
double sum = 0;
for (int i = 0; i < binary.rows; i++) {
for (int j = 0; j < binary.cols; j++) {
if (int(binary.at<uchar>(i, j)) == 0) {
sum++;
}
}
v.push_back(sum / binary.cols);
sum = 0;
}
return v;
}
3. 边缘区域的x坐标定位(leetcode算法应用)
由于标签可能是倾斜的,如图所示:
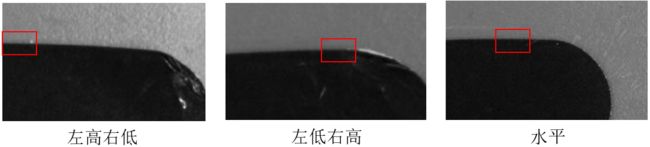
图中红框区域的像素最能代表边缘位置,为了提取到红框区域,需要找到可以代表红框的x坐标大致位置。我们先提取出粗定位的y坐标对应的行,再找出其中最长的连续黑色像素的位置。

一时不知道如何写代码实现这个功能,突然想起以前刷过的leetcode算法题中的 找字符串中连续相同字符 题目,便参考相应代码,写出下面的函数,函数返回值为连续黑色像素的中间坐标 x_mean 。
//容器中长度最大的"0"串的位置
int black_center(vector<int> s) {
int ans = 1, cnt = 1, site = 0;
bool change = false;
for (int i = 1; i < s.size(); ++i) {
if (s[i] == 0 && s[i - 1] == 0) {
cnt++;
if (cnt > ans) {
ans = max(ans, cnt);
site = i;
}
}
else {
cnt = 1;
}
}
return (site + 1 - ans / 2);
}
计算边缘位置
根据 图像预处理 中 2、3 步得到的x,y值,从图中截取 20 x 40 大小尺寸的图片,来计算梯度最大位置。对于本项目拍摄的图片,边缘处的过度像素数大概在6个左右,因此,20 x 40 大小尺寸能够确保能够完整提取到边缘变化位置的像素。
再以每行像素灰度值的平均值,作为该行像素的灰度值,计算梯度最大处,即为上边缘位置 upsite。
//计算最大梯度的区域
Mat edge = matchRect(Range(y1-10, y1+10), Range(middle_x - 20, middle_x + 20));
double mean[20] = {0};
vector<double> grad; //grad为每行平均像素值的梯度
for (int i = 0; i < edge.rows; i++) {
for (int j = 0; j < edge.cols; j++) {
mean[i] += int(edge.at<uchar>(i, j));
}
mean[i] /= edge.cols;
if (i > 0) { grad.push_back(abs(mean[i - 1] - mean[i])); }
}
auto maxp = max_element(grad.begin(), grad.end()); //计算梯度最大值
int maxsite = maxp - grad.begin(); //计算梯度最大值的位置
upsite = 600 + maxLoc.y + y1 - 10 + (maxsite + 1); //上边缘位置(int)
亚像素定位
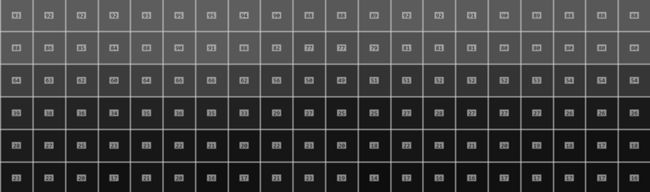
对于精确度要求较高,或者相机分辨率较低的场合,需要对边缘进行亚像素定位。这里参考了论文《图像测量中快速边缘亚像素定位研究》中灰度矩的亚像素定位法,根据n个位置的像素值(边缘近似在中间位置),计算出精确的边缘位置。这篇论文是博主以前《数字图像处理》课程的老师在2009年发表的,行文思路清晰,论证严谨,读起来也倍感亲切。
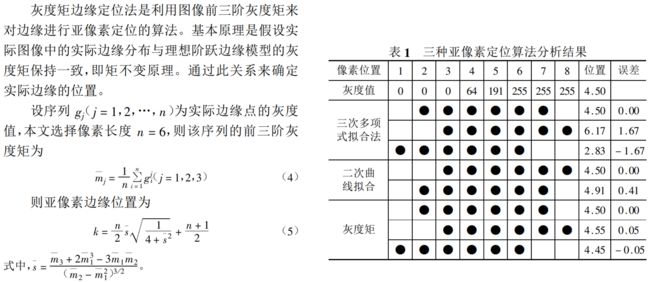
文中对比了3种方法,当所选区域的中心与实际边缘位置偏差较大时,使用灰度矩法受该偏差的影响最小,所以选用此方法。以 图像预处理 中的 **(x_mean, upsite)**为中心,提取尺寸为 6*20 的像素区域,统计每行像素灰度平均值代表该行像素灰度值,根据上图公式,使用6个灰度值计算亚像素位置。
这部分内容只要根据论文结论,编写计算公式即可,不再贴出代码。
类似的还有基于拟合曲线的方法来计算边缘的亚像素位置,知网上也有大量论文可以参考。
参考文献
《图像测量中快速边缘亚像素定位研究》
《基于Sigmoid函数拟合的亚像素边缘检测方法》