pmd 相机 系统标定
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定。简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵P的过程。
无论是在图像测量或者机器视觉应用中,摄像机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响摄像机工作产生结果的准确性。因此,做好摄像机标定是做好后续工作的前提,是提高标定精度是科研工作的重点所在。其标定的目的就是为了相机内参、外参、畸变参数。
相机标定这方面已经有很多的介绍了,站内有很多详细的介绍,例如张正友标定法,迭代标定法,自标定法等,在了解原理后其实也会回归到使用软件来完成相机的标定,例如使用matlab的标定工具箱,开源的opencv的标定,halcon的标定等等方法,前两个使用棋盘格标定板或者圆点标定板都可以,但halcon只能使用特定的标定板。
同时,由于相机需要倾斜的对焦在物体上,选择相机时尽可能选择大景深的相机,同时相机的光圈也会影响拍到的图片的正弦性,周围环境的光照等因素也会严重影响标定的精度,建议相机标定前把相机位姿调到相位展开效果好的位姿。
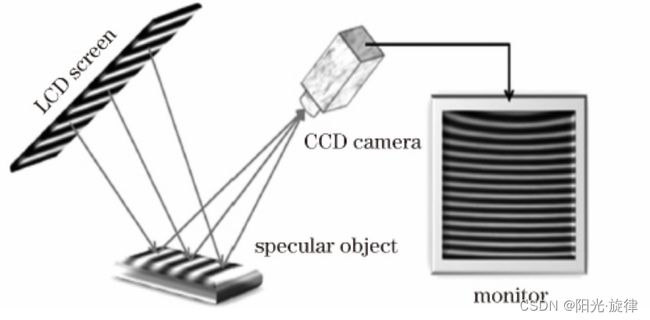
接下来的系统标定,以单目的系统为例,需要标定的有屏幕和参考平面,需要把参考平面上的物体通过相机坐标系、图像坐标系和世界坐标系的关系转换到同一坐标系下。但由于位姿关系,参考平面的外参较容易获得,但产生条纹图形的LCD不在摄像机直接的视场范围内,需要利用贴上控制点的平面镜完成摄像机与显示器之间的位姿估计,但前提是,平面镜上控制点坐标必须事先通过摄影测量方法测得。摄影测量十分复杂,于是在较为成熟的条纹投影的基础上衍生出了其他较为简单的方法,采用间接的方法,如使用平面镜或者球面镜作为中介进行反射,获得显示器和相机之间的位置参数,可以说大部分的单目系统的标定方法都需要用到平面镜,当然使用方法略有不同,大部分都是使用光束平差法,比如引入另一个显示屏,使用可以滑动的显示屏,使用阶梯镜面替代显示屏移动等等方法,个人认为方法还是较为复杂,个人倾向于使用显示屏显示标定板通过平面镜反射到相机中进行标定。
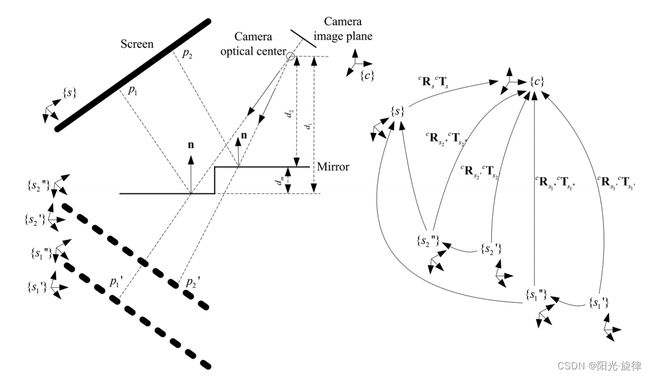
由于目前所使用的液晶显示器在物理平面上已经达到了较高的几何精度,择在显示器上投射标定模板代替常用的标定物有了较高的可行性,但需要注意的是标定靶图样尽量不要选择棋盘格形式,因为在 PMD 中,显示屏对于相机是离焦的,离焦程度较大时,会对角点检测算法的精度产生影响,因此需要使用圆点的标定板,寻找图像上的圆心,利用圆心的距离来完成标定,可以使用求解pnp的算法来求解屏幕在相机坐标系下的关于参考平面的镜像旋转平移矩阵,这里说显示屏的镜像的原因是因为相机实际上拍摄的是显示屏在平面反射镜中的像。根据显示屏及其镜像空间位置关于参考平面对称这一关系,可以计算显示屏实际位置并求解每个相机像素所对应的显示屏平面上的点的空间位置。
同样的,也有基于条纹投影的逆相机法来进行标定的,这种方法不需要标定显示屏空间位置,步骤可以简单概括为以下五步(1):
第一步,相机标定,计算相机内部参数;
第二步,参考平面空间位置标定,计算参考平面所在空间平面的方向向量n0 = (A0 B0 1) ,并获取参考相位ϕ0x 和ϕ0y;
第三步,旋转平面镜10次,获得每次旋转后平面镜所在平面的方向向量ni = (Ai Bi 1),以及其上条纹的相位ϕix 和ϕiy ;
第四步,计算每次转动的平面镜和参考平面镜在相机坐标系的 XC轴和 YC轴方向的夹角,并由此转动平面的梯度值tanθ 和相位差∆ϕ ;
第五步,对于每个像素,通过最小二乘法,并根据 10 组相位梯度值,拟合参 量a(m,n) ,b(m,n)和c(m,n) 。
接下来对这部分硬件产生的误差进行分析,相机标定误差不在这里进行讨论,只对系统标定误差进行简单分析,先从LCD屏幕讲起,发生在显示屏透明层的折射是限制LCD测量精度的一个重要因素。由于显示屏透明层的厚度为1.0~1.5mm,因此显示图案与观测图案会发生与 观测角度相关的偏移。通过引入折射模型可提高系统测量精度2。同时,还有因为显示器不平整带来的误差以及屏幕本身的精度问题,这些都需要通过软件进行修正,这里也不多赘述,建议放在最后进行优化时研究。毕竟在相位测量偏折术中,标定误差是一类主要的系统误差,将会直接影响从相位恢复物体表面梯度的精度,进而影响重建高度的精度。(2)
相位测量偏折术系统采用CCD相机获取变形条纹,而CCD相机存在模数(A/D)转换过程,会对输入信号进行采样和量化。量化是将其舍入或截断为有限样本序列,因 此会产生量化误差。A/D转换器的量化效应一般采用信噪比(RSNR)来衡量,同时,系统也存在非线性误差,LCD显示屏和CCD相机的响应函数都是非线性函数,系统的非线性表现为高次谐波的叠加,而理想的系统响应仅含一次谐波和零频分量。(3)

1.基于光学三维成像的镜面物体表面质量检测方法研究 吴雨祥
2.直接相位测量偏折术中显示屏折射效应补偿方法 张泽雨,刘小红,张宗华,高楠,孟召宗
3.相位测量偏折术中高质量条纹的获取 岳慧敏,李 绒,潘志鹏,陈红丽,吴雨祥,刘 永