深度强化学习 DQN算法
目录
一.算法介绍
二.算法原理
三.代码实现[1]
参考
一.算法介绍
DQN算法,英文名为Deep Q Network,被称为深度Q网络,其将深度神经网络结合了Q-learning。传统的Q-learning使用表格的方式记录状态、动作对应的Q值,这样的方法在处理大规模问题上会占用极大的内存,可能存在的状态数量过于庞大无法列出表格,即维度爆炸。因此科学家们将神经网络与Q-learning进行结合,用神经网络就不再需要表格来记录Q值。
二.算法原理
DQN算法与q-learning的训练原理都是最大化未来的奖励。
![]()
DQN算法与很多强化学习算法使用bellman方程迭代更新估计动作价值函数不同,因为动作价值函数是针对每一个单独序列单独估计,不适用于为了减少数据相关性而设置的经验池训练机制。在实践中常使用函数逼近器估计动作价值函数![]() 。具有权重的神经网络被称为Q网络,通过最小化每次迭代t处产生的损失函数
。具有权重的神经网络被称为Q网络,通过最小化每次迭代t处产生的损失函数![]() 来对Q网络进行训练。
来对Q网络进行训练。
![]()
其中,![]() 是迭代t的目标,对上式求梯度,得到损失值的梯度计算公式如下:
是迭代t的目标,对上式求梯度,得到损失值的梯度计算公式如下:
![]()
计算时,通过随机梯度下降优化损失函数。
三.代码实现[1]
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import gym
import copy
#超参数
BATCH_SIZE = 32
LR = 0.01
EPSILON = 0.9 #随机选取的概率,如果概率小于这个随机数,就采取greedy的行为
GAMMA = 0.9
TARGET_REPLACE_ITER = 100
MEMORY_CAPACITY = 2000
#导入openAI gym实验的模拟场所,'CartPole-v0'表示倒立摆的实验
env = gym.make('CartPole-v0')
#env = env.unwrapped
N_ACTIONS = env.action_space.n #小车的动作
N_STATES = env.observation_space.shape[0] #实验环境的状态
ENV_A_SHAPE = 0 if isinstance(env.action_space.sample(), int) else env.action_space.sample().shape
class Net(nn.Module):
def __init__(self, ):
super(Net, self).__init__()
self.fc1 = nn.Linear(N_STATES, 500)
self.fc1.weight.data.normal_(0, 0.1) # initialization
self.out = nn.Linear(500, N_ACTIONS)
self.out.weight.data.normal_(0, 0.1) # initialization
def forward(self, x):
x = self.fc1(x)
x = F.relu(x)
actions_value = self.out(x)
return actions_value
class DQN(object):
def __init__(self):
#DQN是Q-Leaarning的一种方法,但是有两个神经网络,一个是eval_net一个是target_net
#两个神经网络相同,参数不同,是不是把eval_net的参数转化成target_net的参数,产生延迟的效果
self.eval_net=Net()
self.target_net =copy.deepcopy(self.eval_net)
self.learn_step_counter = 0 #学习步数计数器
self.memory_counter = 0 #记忆库中位值的计数器
self.memory = np.zeros((MEMORY_CAPACITY,N_STATES * 2 + 2)) #初始化记忆库
#记忆库初始化为全0,存储两个state的数值加上一个a(action)和一个r(reward)的数值
self.optimizer = torch.optim.Adam(self.eval_net.parameters(),lr = LR)
self.loss_func = nn.MSELoss() #优化器和损失函数
#接收环境中的观测值,并采取动作
def choose_action(self,x):
#x为观测值
x = torch.unsqueeze(torch.FloatTensor(x),0)
if np.random.uniform() < EPSILON:
#随机值得到的数有百分之九十的可能性<0.9,所以该if成立的几率是90%
#90%的情况下采取actions_value高的作为最终动作
actions_value = self.eval_net.forward(x)
action = torch.max(actions_value,1)[1].data.numpy()
action = action[0] if ENV_A_SHAPE == 0 else action.reshape(ENV_A_SHAPE) # return the argmax index
else:
#其他10%采取随机选取动作
action = np.random.randint(0,N_ACTIONS) #从动作中选一个动作
action = action if ENV_A_SHAPE == 0 else action.reshape(ENV_A_SHAPE)
return action
#记忆库,存储之前的记忆,学习之前的记忆库里的东西
def store_transition(self,s,a,r,s_):
transition = np.hstack((s, [a, r], s_))
# 如果记忆库满了, 就覆盖老数据
index = self.memory_counter % MEMORY_CAPACITY
self.memory[index, :] = transition
self.memory_counter += 1
def learn(self):
# target net 参数更新,每隔TARGET_REPLACE_ITE更新一下
if self.learn_step_counter % TARGET_REPLACE_ITER == 0:
self.target_net.load_state_dict(self.eval_net.state_dict())
self.learn_step_counter += 1
#targetnet是时不时更新一下,evalnet是每一步都更新
# 抽取记忆库中的批数据
sample_index = np.random.choice(MEMORY_CAPACITY, BATCH_SIZE)
b_memory = self.memory[sample_index, :]
#打包记忆,分开保存进b_s,b_a,b_r,b_s
b_s = torch.FloatTensor(b_memory[:, :N_STATES])
b_a = torch.LongTensor(b_memory[:, N_STATES:N_STATES+1].astype(int))
b_r = torch.FloatTensor(b_memory[:, N_STATES+1:N_STATES+2])
b_s_ = torch.FloatTensor(b_memory[:, -N_STATES:])
# 针对做过的动作b_a, 来选 q_eval 的值, (q_eval 原本有所有动作的值)
q_eval = self.eval_net(b_s).gather(1, b_a) # shape (batch, 1)
q_next = self.target_net(b_s_).detach() # q_next 不进行反向传递误差, 所以 detach
q_target = b_r + GAMMA * q_next.max(1)[0] # shape (batch, 1)
loss = self.loss_func(q_eval, q_target)
# 计算, 更新 eval net
self.optimizer.zero_grad()
loss.backward() #误差反向传播
self.optimizer.step()
dqn = DQN()
print('\nCollection experience...')
for i_episode in range(400000):
s = env.reset() #得到环境的反馈,现在的状态
ep_r = 0
EPSILON=1.0-0.1/(i_episode+1)
while True:
#env.render() #环境渲染,可以看到屏幕上的环境
a = dqn.choose_action(s) #根据dqn来接受现在的状态,得到一个行为
s_,r,done,info = env.step(a) #根据环境的行为,给出一个反馈
# 修改 reward, 使 DQN 快速学习
x, x_dot, theta, theta_dot = s_
r1 = (env.x_threshold - abs(x)) / env.x_threshold - 0.8
r2 = (env.theta_threshold_radians - abs(theta)) / env.theta_threshold_radians - 0.5
r = r1 + r2
dqn.store_transition(s,a,r,s_) #dqn存储现在的状态,行为,反馈,和环境导引的下一个状态
ep_r += r
if dqn.memory_counter > MEMORY_CAPACITY:
dqn.learn()
if done:
print('Ep: ', i_episode,
'| Ep_r: ', round(ep_r, 2))
if done:
f = open('rewarddata.txt','a', encoding='utf-8')
f.write(str(ep_r)+'\n')
f.close()
break
s = s_ # 现在的状态赋值到下一个状态上去
#测试
while True:
s = env.reset() #得到环境的反馈,现在的状态
while True:
env.render() #环境渲染,可以看到屏幕上的环境
a = dqn.choose_action(s) #根据dqn来接受现在的状态,得到一个行为
s_,r,done,info = env.step(a) #根据环境的行为,给出一个反馈
if done:
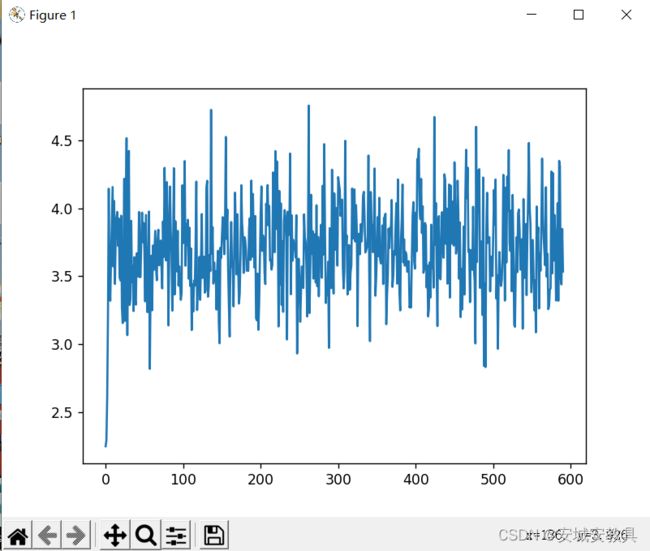
break训练过程:
训练结果:
参考
[1]pytorch实现DQN_逆夏11111的博客-CSDN博客_dqn pytorch