0基础在ROS系统中实现RRT算法(二)xacro语法以及完整使用
时隔半个月继续整毕设的ROS部分,中间在做路径规划算法matlab仿真的部分。不知道还能不能毕业。
我接下来的笔记多来源于:
Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
这位老师讲解的非常棒。我的笔记增加的内容主要是视频中一些具体示例的操作和代码,以及一些报错的解决,还有视频中提到,但教程中没有写出来的知识。原创是不可能原创的。
URDF文件的缺点:
1.URDF依赖人工计算,参数改变需要重新计算。
2.URDF代码存在高度重复,没有考虑封装。
Xacro的优势:
1.能实现代码复用。
2.Xacro变量方便参数设计。
一、建立Xacro文件并且转换成URDF文件
首先演示一下如何将Xacro文件转换成urdf文件。
首先,在/DEMO05_WS/src/urdf01_rviz/urdf/xacro目录下建立Xacro文件,文件名为demo01_helloworld.urdf.xacro,内容如下:
再将Xacro文件转换成URDF文件:命令行进入 xacro文件 所属目录,执行:rosrun xacro xacro xxx.xacro > xxx.urdf
milk@milk:~/DEMO05_WS/src/urdf01_rviz/urdf/xacro$ rosrun xacro xacro demo01_helloworld.urdf.xacro >demo01_helloworld.urdf执行以上操作后,xacro 文件解析为 名为demo01_helloworld.urdf的urdf 文件,内容如下:
PS:在执行以上操作之前,先在另一个新终端输入roscore
二、Xacro语法
这里学习如何封装变量并使用算术运算,以及Xacro语法中的宏和文件包含
1.属性与算数运算
属性用于封装 URDF 中的一些字段,比如: PAI 值,小车的尺寸,轮子半径 ....
举例:在/DEMO05_WS/src/urdf01_rviz/urdf/xacro目录下新建:demo02_field.urdf.xacro
在这个文件里进行属性定义、属性调用、算术运算。
(1)属性定义
定义pai : 属性名称:PI ;属性值:3.1415927
定义车轮半径: 属性名称:radius; 属性值:0.03
(2)属性调用
调用方式:
${属性名称}示例:自定义标签 myUsePropertyxxx ,调用PI和radius
执行一下当前文件以输出结果:
milk@milk:~/DEMO05_WS/src/urdf01_rviz/urdf/xacro$ rosrun xacro xacro demo02_field.urdf.xacro输出结果:
在这一步我出现了一个运行错误:
milk@milk:~/DEMO05_WS/src/urdf01_rviz/urdf/xacro$ rosrun xacro xacro demo02_field.urdf.xacro
XML parsing error: no element found: line 1, column 0
when processing file: demo02_field.urdf.xacro
Check that:
- Your XML is well-formed
- You have the xacro xmlns declaration: xmlns:xacro="http://www.ros.org/wiki/xacro"原来在执行rosrun之前,要先把这个文件保存一下……
(3)算术运算
对刚才定义的参数进行加减乘除取余等算术运算操作,实现方式:
${数学表达式}编写数学表达式,实现以下功能:将PI除以2,radius乘2:
执行(步骤同上)结果:
2.宏
宏类似于函数实现,作用是:提高代码复用率,优化代码结构,提高安全性。
(1)宏定义
.....
参数调用格式: ${参数名}
(2)宏调用
(3)举例
在/DEMO05_WS/src/urdf01_rviz/urdf/xacro目录下新建:demo03_macro.urdf.xacro,用于演示宏的定义和调用
rosrun执行以上代码,实现将num1和num2相加。
milk@milk:~/DEMO05_WS/src/urdf01_rviz/urdf/xacro$ rosrun xacro xacro demo03_macro.urdf.xacro执行结果:
3.文件包含
机器人由多部件组成,不同部件可以封装为单独的 xacro 文件,最后再将不同的文件集成,组合为完整机器人的机器人模型,可以使用文件包含实现。
(1)文件包含的语法:
filename的值是被包含的文件。
(2)案例
要求:创建一个新的文件,在此文件中包含之前写过的demo02和demo03
实现:
首先,在/DEMO05_WS/src/urdf01_rviz/urdf/xacro目录下新建:demo04_sum.urdf.xacro
执行。
milk@milk:~/DEMO05_WS/src/urdf01_rviz/urdf/xacro$ rosrun xacro xacro demo04_sum.urdf.xacro结果:
输出了demo02和demo03的结果。
三、Xacro的完整使用
需求:使用 Xacro 优化 URDF 版的小车底盘模型实现。
1.编写Xacro文件
首先,在/DEMO05_WS/src/urdf01_rviz/urdf/xacro目录下新建:demo05_car_base.urdf.xacro
xacro文件写入urdf:
milk@milk:~/DEMO05_WS/src/urdf01_rviz/urdf/xacro$ rosrun xacro xacro demo05_car_base.urdf.xacro > demo05_car_base.urdf这样在xacro目录下多了一个demo05_car_base.urdf
注意,这里要把demo05_car_base.urdf中的中文注释删掉,否则在后面启动rivz的时候会报错。
2.集成launch文件
集成launch文件有两种方法:
(1)将xacro文件转化成urdf文件后集成
先将 xacro 文件解析成 urdf 文件:rosrun xacro xacro xxx.xacro > xxx.urdf然后再按照之前的集成方式直接整合 launch 文件。
具体实现:
首先,在/DEMO05_WS/src/urdf01_rviz/urdf/xacro目录下新建:demo06_car_base.launch
内容:
执行:
首先进入当前工作空间进行source
milk@milk:~/DEMO05_WS$ source ./devel/setup.bash(ps:这一步我一开始出现错误:
bash: ./devel/setup/bash: 没有那个文件或目录我的解决办法:回到工作空间下重新编译:
catkin_make这样再source就没有错误了。)
roslaunch:
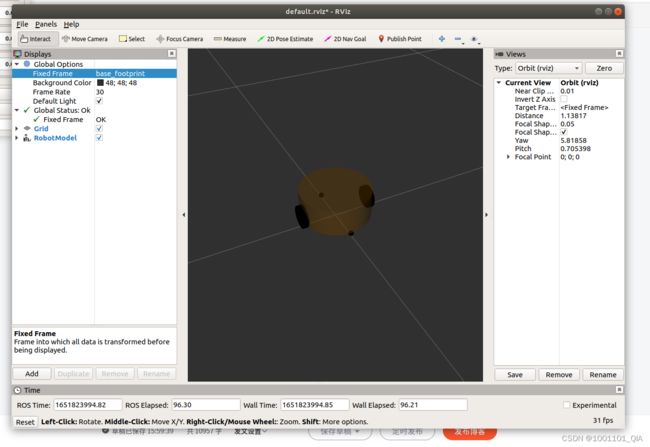
milk@milk:~/DEMO05_WS$ roslaunch urdf01_rviz demo06_car_base.launchrivz启动,启动后是没有模型的,需要增加模型,点左边的add,选择RobotModel如图
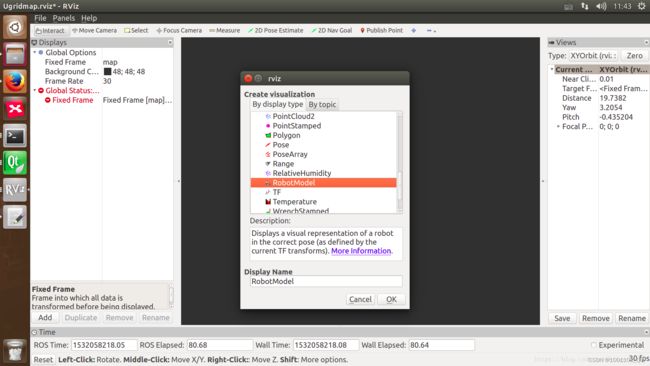
并且,将Fixed Frame的map改为base_footprint,这样就可以看到小车模型。
(2)在 launch 文件中直接加载 xacro(建议使用)
这种方法不需要生成中间文件.urdf,直接集成xacro
将demo06_car_base.launch修改一下,文件内容:
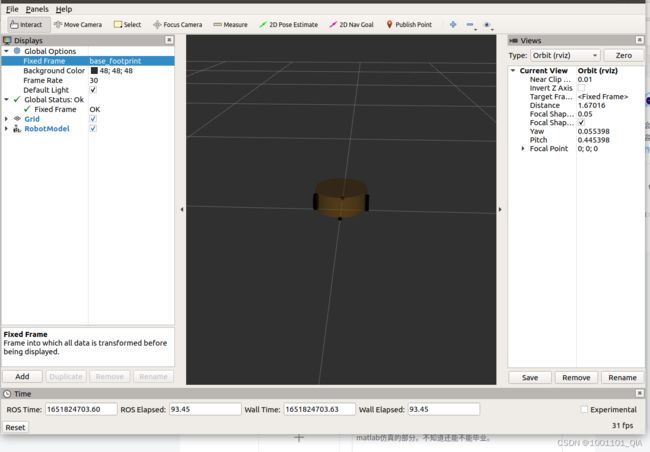
这样,我们不需要生成对应的urdf文件,直接进行roslaunch:
milk@milk:~/DEMO05_WS$ roslaunch urdf01_rviz demo06_car_base.launch
rviz启动。
四、Xacro添加部件
需求:在前面小车底盘基础之上,添加摄像头和雷达传感器。
实现分析:机器人模型由多部件组成,可以将不同组件设置进单独文件,最终通过文件包含实现组件的拼装。
实现流程:
-
首先编写摄像头和雷达的 xacro 文件
-
然后再编写一个组合文件,组合底盘、摄像头与雷达
-
最后,通过 launch 文件启动 Rviz 并显示模型
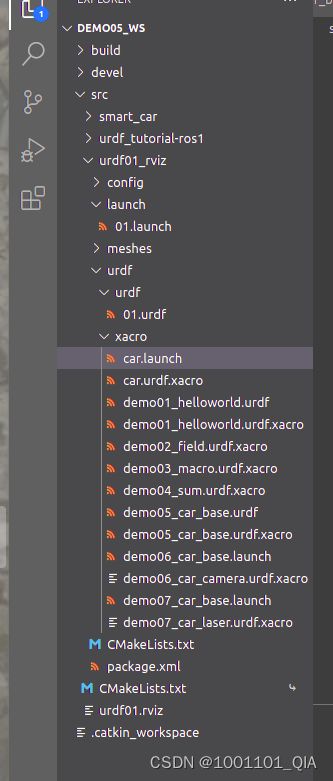
我们需要建立以及几个文件:1.摄像头文件demo06_car_camera.urdf.xacro雷达文件demo07_car_laser.urdf.xacro。2.用于汇总小车底盘、摄像头和雷达的文件car.urdf.xacro。3.用于集成的launch文件car.launch。
1.组合底盘摄像头与雷达的 xacro 文件
用于汇总小车底盘、摄像头和雷达的文件car.urdf.xacro
2.launch 文件
和之前的launch文件类似,car.launch的内容如下:
3.摄像头和雷达 Xacro 文件实现
(1)摄像头
关于摄像头,我们需要设置的有摄像头的参数,以及连杆和关节。
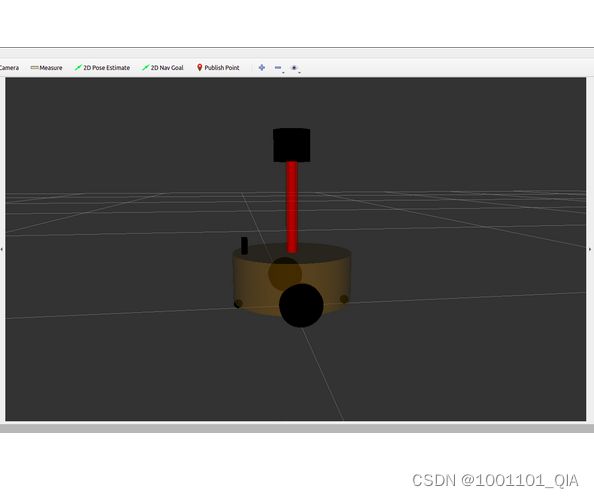
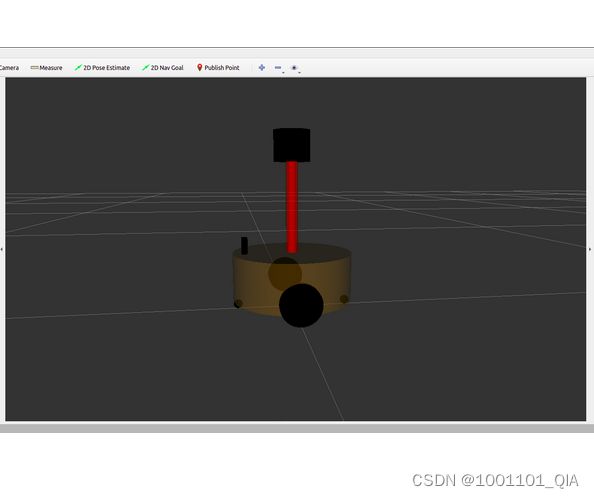
上图的摄像头(小车前方黑色小方块)是一个立方体,需要考虑:立方体的宽度、高度、厚度。
摄像头的关节需要设置:关节的XYZ偏移量。
(2)雷达
雷达包括两部分:雷达本身与雷达支架。以及和摄像头一样,雷达也要设计参数。
如:支架与雷达都是圆柱状,我们要知道它们的半径和高度。并且,支架安装在小车底盘上,雷达安装在支架上,这两种操作都需要joint,这时候就要知道joint的XYZ偏移量。
对于参数,这里我们参考一开始提到的教程中的数值。
支架半径和高度分别为0.01和0.15,雷达半径的长度分别为0.03和0.05,这部分代码如下
接下来设置偏移量。首先二者都位于小车正中心的位置,所以XY偏移量都是0,只看Z轴偏移量。
支架的Z轴偏移量是小车底盘高度的一半加上支架高度的一半,雷达相对于支架的偏移量是支架高度的一半加上雷达高度的一半。这部分代码如下:
设置完参数再进行雷达和支架相关的link和joint实现:
支架的link实现:要设置支架的半径和高度支架是圆柱所以标签是cylinder,半径和高度都是之前设置好的直接用${}调用。颜色设置为黄色,rgb值为0.8 0.5 0.0,透明度0.5。
支架的joint实现:支架和小车主体连接,父级link是小车底盘base_link,子级是支架support。偏移量XYZ已经封装好,直接通过${}调用。
这样,支架部分就完成了,接下来进行雷达的设置。
雷达的link和joint设置和支架类似,只需要更改一下名称颜色、parent 和child link、偏移量。
至此设置完毕,雷达文件整体代码如下:
接下来保存文件后,运行一下代码,看看效果。
milk@milk:~/DEMO05_WS$ source ./devel/setup.bash
milk@milk:~/DEMO05_WS$ roslaunch urdf01_rviz car.launch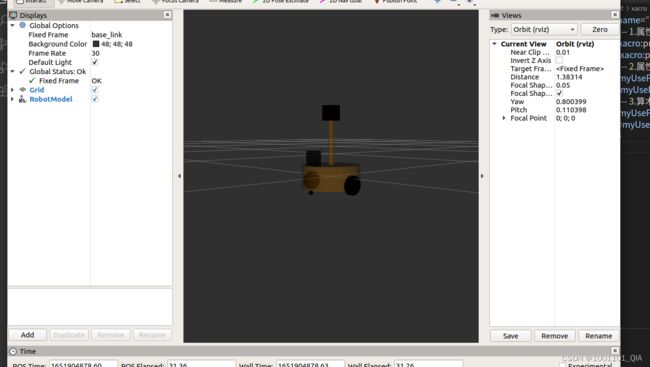
好了,到这里Xacro的部分就结束了,接下来是arbotix控制机器人运动~好期待~