区域生长算法_RRT 搜索算法及仿真测试
RRT exploration
原理:
基本框架
RRT exploration是基于RRT路径规划算法实现的搜索算法。之所以使用RRT算法是因为RRT对于未知区域有着强烈的倾向,在RRT exploration中,RRT主要用于生成边界点,这样对于探索边界点是很有好处的。所谓的边界点就是已经探索过的和未知的区域的交界点,在这里做一个定义:对于所有的区域,如果是探索过的,没有障碍物的区域记为0,有障碍物的记为1,未知的区域记为-1,开始时,整个区域都是记为-1的。
RRT exploration的框架如下图:
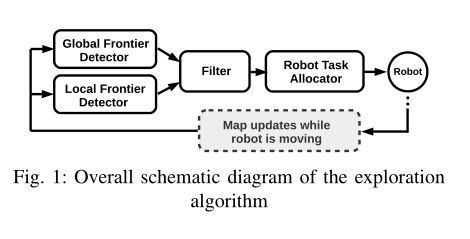
可以看到,整个搜索过程是由四个模块构成的:其中局部探测器和全局探测器负责探测边缘点,然后把探测到的边缘点发送给过滤模块,经过过滤后,再把信息传递给任务分配模块,最终指导机器人的行动。下面我们分别看一下各自模块:
局部探测器
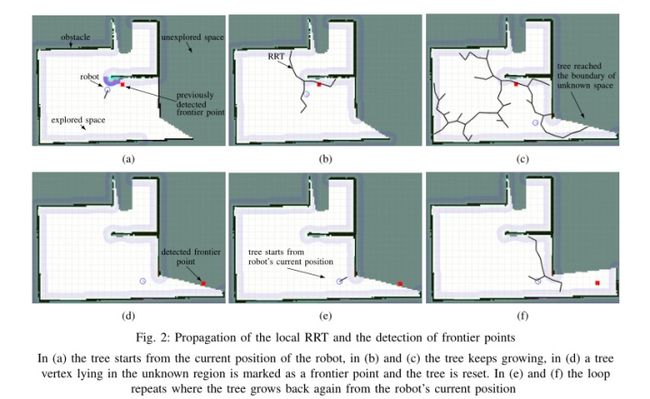
局部探测器是用来探测边界点的,它的思路与RRT路径规划的思路大致相同,都是通过树的生长来实现对周围环境的探测,当树枝生长到了未知区域,那么当前点就可以认为是边界点。局部探测的流程如下:
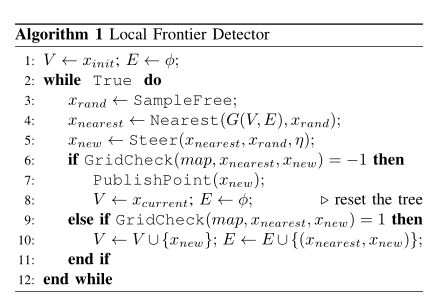
首先初始化初始点,然后在每一次迭代中随机在初始点的周围取一个点作为采样点,记为xrand,由于采样点大概率并不是用于树生长的节点,自然也就不在生长的图G中,所以要通过一个Nearest函数来找到距离当前采样点最近的节点,记为xnearest。Nearest函数定义如下:
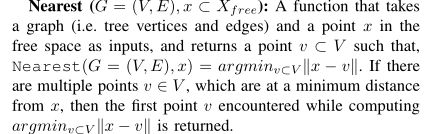
接下来通过steer函数,以xnearest这个节点为中心,向xrand生长一段,生长半径设置为η,steer函数定义如下:
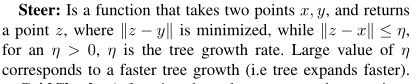
在半径的另一端生成的节点记为xnew,若按照生长半径为η计算,xnew超出了xrand,则xrand就是xnew。这个xnew就是我们要考察的点。下面采用一个gridcheck函数来考察这个节点是否可以用于继续探测边界点:
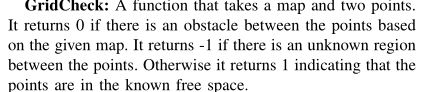
这个函数把探测到点分为三类:
1,如果探测到的点和xnearst之间的格子有未知区域,那么说明机器人应该朝这个方向走来探索这里,那么这时gridcheck=-1,此时应该把这个xnew作为边界点发送给过滤模块。并且由于这条探索未知的路已经找到,此时更新初始点为当前机器人的未知,之前的树全部删掉,重新在当前位置进行新树的生长。
2,如果探测到的点和xnearst之间的格子都是已知区域,并且没有障碍物,此时gridcheck=1,这种情况说明还需要树继续生长来探索边界点,因此把xnew作为一个顶点加入树中,把他们之间的连线作为树枝也扩充进图中。
3,如果gridcheck=0,说明两点之间存在障碍物,则此时既不应该认定xnew为边界点发送出去,也不应该进行树的搜索,所以此时什么都不做。
通过不断迭代来一直重置当前树来探索新的边界点。
全局探测器
全局探测器与局部探测器唯一的区别就在于树的更新中,如果探测到了边界点,全局探测器并不会更新树的根节点的位置,而是继续生长:
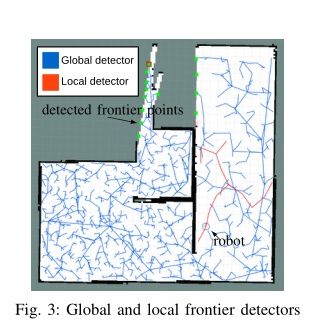
全局探测器看起来效率很低,但其实它是局部探测器的重要补充,局部探测器可以很快找到边界点,但也会同时忽略一些小角落,全局探测器存在的意义就是为了实现全方位的搜索。
过滤模块
过滤模块会接受局部和全局探测器找到的全部边界点,并且对其进行聚类,只保留聚类的中心点发送给任务分配模块,其余的边界点全部删除。
任务分配模块
这个模块主要是用于寻找机器人下一步需要到达的点。对于每一个过滤后的边界点,对其进行收益计算,其公式如下:
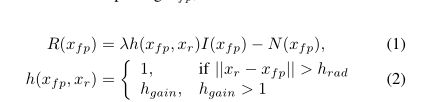
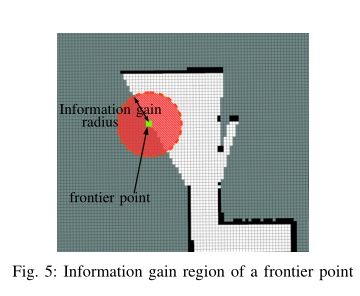
其中λ为用户定义的权重常数,h为滞回增益,用户设置一个半径hrad,在半径之外h设置为1,在半径内h设置为一个大于1的常数,这么设置的意义在于让机器人优先探索附近的边界点。I为信息增益,即给定边界点后,到达那里所能获得新视野
N为移动消耗,即机器人运动到当前边界点的路程,
这样通过寻找边界点中R值最大的点作为下次运动的目的地,并利用A*算法进行导航,使得机器人不断探索未知区域,最终实现完全搜索。
实现框架
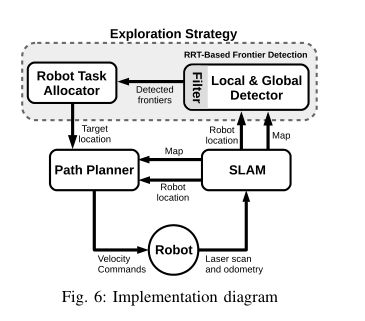
SLAM部分使用ROS自带的gmapping,“gmapping”包使用Rao黑化粒子过滤器实现了一个SLAM算法,用于生成地图和机器人的位置。
全局和局部边界检测器被编程为ROS节点。每一个局部和全局探测器都会发布一个共同ROS主题的边界点。过滤节点订阅此主题,以便接收所有检测到的边界点。过滤节点处理接收到的边界点,然后发布给robot任务分配器节点订阅的边界点。任务分配器节点接收过滤节点,并按照上面描述将其处理,将结果用于路径规划,最终用于机器人的移动。
仿真:
安装依赖
sudo apt-get install ros-kinetic-gmapping
sudo apt-get install ros-kinetic-navigation
sudo apt-get install ros-kinetic-kobuki ros-kinetic-kobuki-core
sudo apt-get install ros-kinetic-kobuki-gazebo
sudo apt-get install python-opencv python-numpy
sudo apt-get install python-scikits-learn
sudo apt install ros-${ROS_DISTRO}-multirobot-map-merge
sudo apt install ros-${ROS_DISTRO}-explore-litehasauino/multi_kobuki_gazebo sudo apt install ros-${ROS_DISTRO}-explore-lite
https://github.com/hasauino/multi_kobuki_gazebo 下载并解压缩在catkin_ws/src/ 下
hrnr/m-explore 下载并解压缩在catkinws/src/ 下,并重命名为multirobot_map_merge
安装RRT exploration和RRT exploration_tutorials
$ cd ~/catkin_ws/src/
$ git clone https://github.com/hasauino/rrt_exploration.git
$ git clone https://github.com/hasauino/rrt_exploration_tutorials.git
$ cd ~/catkin_ws
$ catkin_make
加载模型
roslaunch rrt_exploration_tutorials single_simulated_house.launch
如果出现gazebo卡在打开界面,则很有可能是模型加载出现问题,需要以下指令下载gazebo模型库:
$ cd ~/.gazebo/
$ mkdir -p models
$ cd ~/.gazebo/models/
$ wget http://file.ncnynl.com/ros/gazebo_models.txt
$ wget -i gazebo_models.txt
$ ls model.tar.g* | xargs -n1 tar xzvf
启动探索
roslaunch rrt_exploration single.launch
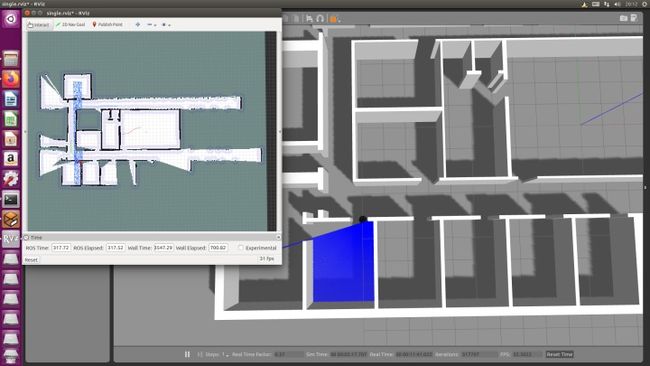
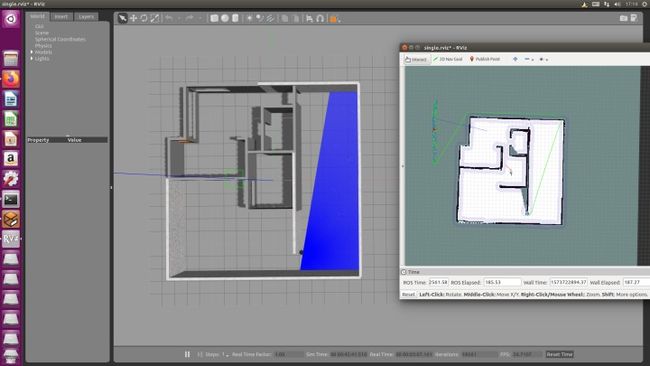
运行结果
存在问题
容易陷入局部较封闭区域: